(54) ПОДЪЕМНИК
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемник | 1978 |
|
SU695960A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| ".'О ЗНАЯ•''"'"^"СШ ць** &iSAМ. Кл. В 66f 7/08УДК 621.876.113(088.8) | 1973 |
|
SU384788A1 |
| Передвижной подъемник | 1982 |
|
SU1087459A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2263624C2 |
| Подъемник | 1979 |
|
SU893839A1 |
| Грузоподъемник погрузчика | 1981 |
|
SU1123990A1 |
| Кран-штабелер | 1987 |
|
SU1504177A1 |
| Подъемник | 1988 |
|
SU1519998A1 |
1
Изобретение относится к подъемно-транспортному оборудованию, а именно к подъемникам.
Известен подъемник, содержащий опорную раму и грузовую площадку, соединенные посредством подвижных и неподвижных щарниров с щарнирно-рычажным механизмом типа нюрнбергских ножниц 1.
Недостатком подвижного подъемника является незначительная зона обслуживания.
Цель изобретения - увеличение зоны обслуживания.
Для достижения поставленной цели неподвижные шарниры расположены по разные стороны .от-вертикальной оси симметрии шарнирно-рычажного механизма.
Кроме того, по меньшей мере один из подвижных шарниров установлен в криволинейной направляющей.
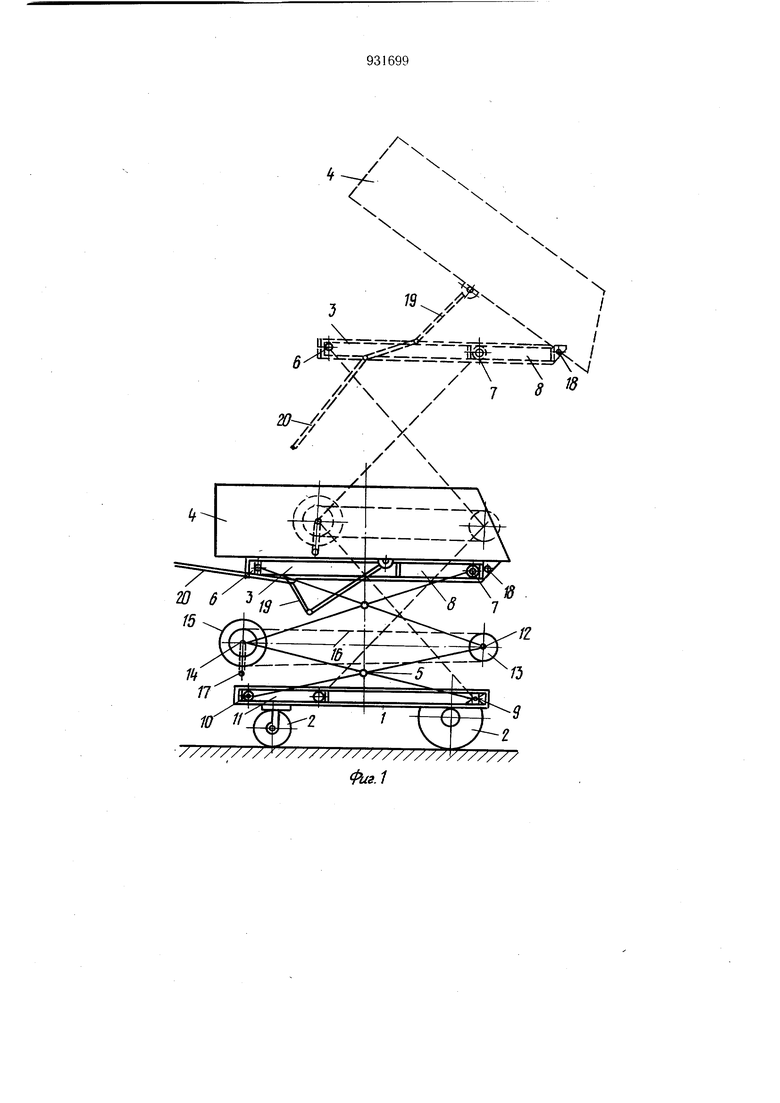
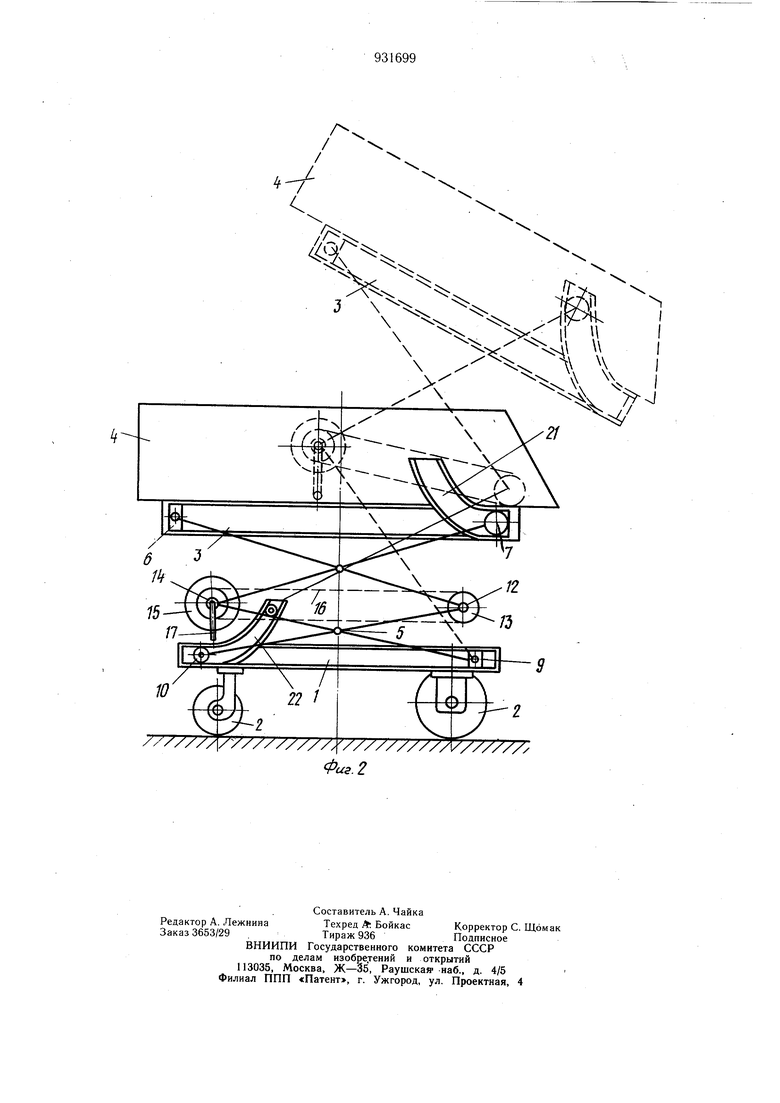
На фиг. 1 изрбражен подъемник, общий вид; на фиг. 2 - то же, вариант выполнения.
Подъемник (фиг. 1) состоит из опорной рамы 1 на ходовых колесах 2, грузовой площадки 3, на которой установлена емкость 4 для груза, и щарнирно-рычажного механизма 5 типа нюрнбергских ножниц. Грузовая площадка 3 соединена с рычагами механизма 5 шарниром 6, закрепленным на ней, и шарниром 7, установленным подвижно в прямолинейной направляющей 8. Опорная
5 рама 1 соединена с рычагами механизма 5 щарниром 9, закрепленным на ней, и шарниром 10, установленным в прямолинейной направляющей 11. Неподвижные щарниры 6 и 9 и подвижные щарниры 7 и 10 располо,Q жены по разные стороны от вертикальной оси симметрии щарнирно-рычажного механизма 5. На оси, соединяющей шарниры t2 этого механизма, установлен блок 13, а на валу, соединяющем шарниры 14, закреплен барабан 15. Блок 13 и барабан 15
15 огибает трос 16, закрепленный на барабане 15. Вал, соединяющий шарниры 14, снабжен рукояткой 17.
Емкость 4 и площадка 3 имеют шарнирное соединение 18 и шарнирно-рычажное
20 соединение с помощью рычагов 19 и 20. Ломаный рычаг 19 имеет шарнирное соединение с площадкой 3, а рычаг 20 - с рычагом 19 и емкостью 4.
Подъемник работает следующим образом.
При вращении рукоятки 17 трос 16 наматывается на барабан 15, шарниры 12 и 14 сближаются .между собой, и осуществляется подъем грузовой площадки 3. Так как при этом сближаются между собой щарниры 6 и 7, грузовая 1дощадка 3 одновременно с подъемом перемещается в направлении от шарнира 6 к щарниру 7 (на фиг. 1 - вправо). Подъем грузовой площадки 3 осуществляется до тех пор, пока она не сместится в горизонтальном направлении в положение, при котором правый край емкости 4 окажется над требуемым местом разгрузки груза. После этого опусканием конца рычага 20 осуществляют поворот емкости 4 относительно щарнира 18, и емкость разгружается (на фиг. 1 детали подъемника в этом положении показаны пунктиром).
Вариант вььполнения подъемника (фиг. 2) предусматривает криволинейные направляющие 21 и 22, в которых установлены подвижные щарниры 7 и 10, и закрепление емкоети 4 на грузовой площадке 3. При сближении между собой шарниров 12 и 14 шарнйрно-рычажного механизма 5 одновременно с подъемом и горизонтальным перемещением грузовой площадки 3 осуществляется наклон и, следовательно, при достижении требуемого угла наклона разгрузка емкости 4. Это положение показано на фиг. 2 пунктиром. В таком подъемнике (фиг. 2) нет необходимости в индивидуальном приводе для поворота емкости 4.
Предлагаемый подъемник обладает больщой маневренностью, способен въезжать в тесные помещения к мусоросборникам бытовых отходов и производить выгрузку их в контейнеры, установленные на помосте, когда нет возможности подъехать к ним вплотную и выгрузка производится не в ближайщий край контейнера, а на середину его, что увеличивает полезный объем его использования. Внедрение одного такого подъемника даст годовой экономический эффект 1070 руб.
Формула изобретения
Источники информации, принятые во внимание при экспертизе 1. Патент Франции № 2200190, кл. В 66 F 11/00, 1974 (прототип).
.
..t.........
t
п п
N
XX- Х
19
/
I
.. ,
. J
Фаз. 2 - 1 ч. . :;Х. ь I
