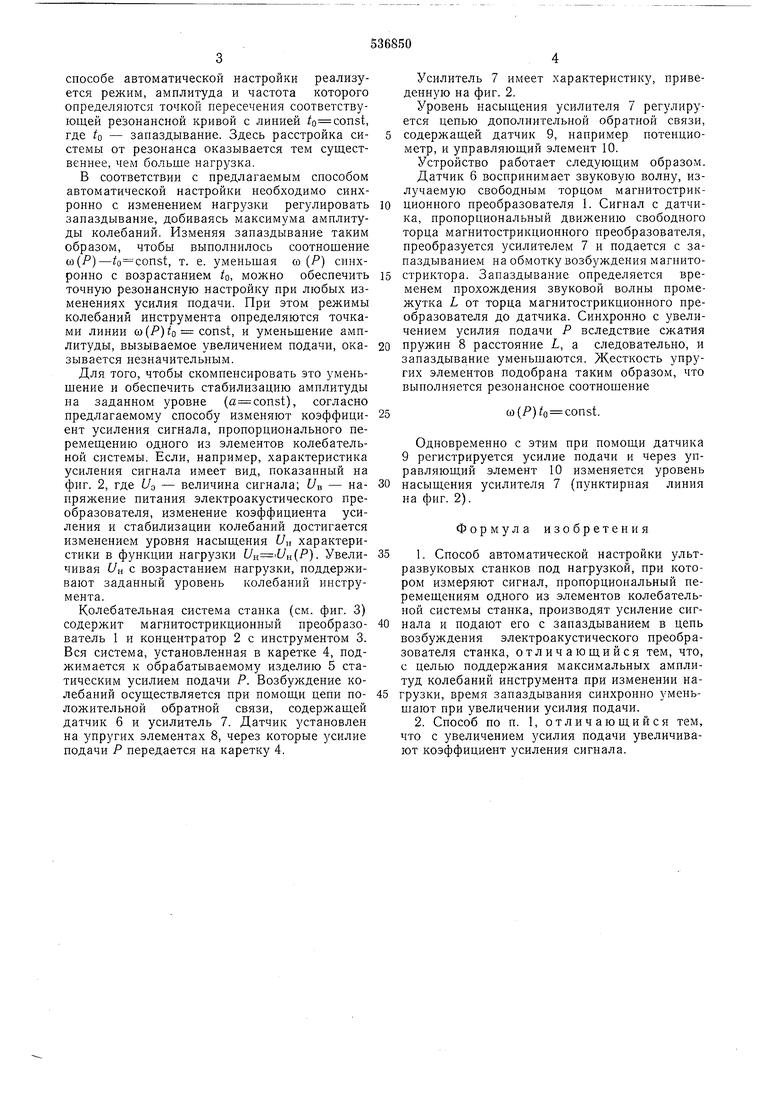
способе автоматической настройки реализуется режим, амплитуда и частота которого определяются точкой пересечения соответствующей резонансной кривой с линией г о const, где 0 - запаздывание. Здесь расстройка системы от резонанса оказывается тем существеннее, чем больще нагрузка.
В соответствии с предлагаемым способом автоматической настройки необходимо синхронно с изменением нагрузки регулировать запаздывание, добиваясь максимума амплитуды колебаний. Изменяя запаздывание таким образом, чтобы выполнилось соотнощение (л(Р)- 0-const, т. е. уменьшая со (Р) синхронно с возрастанием to, можно обеспечить точную резонансную настройку при любых изменениях усилия подачи. При этом режимы колебаний инструмента определяются точками линии со (Р) 0 const, и уменьшение амплитуды, вызываемое увеличением подачи, оказывается незначительным.
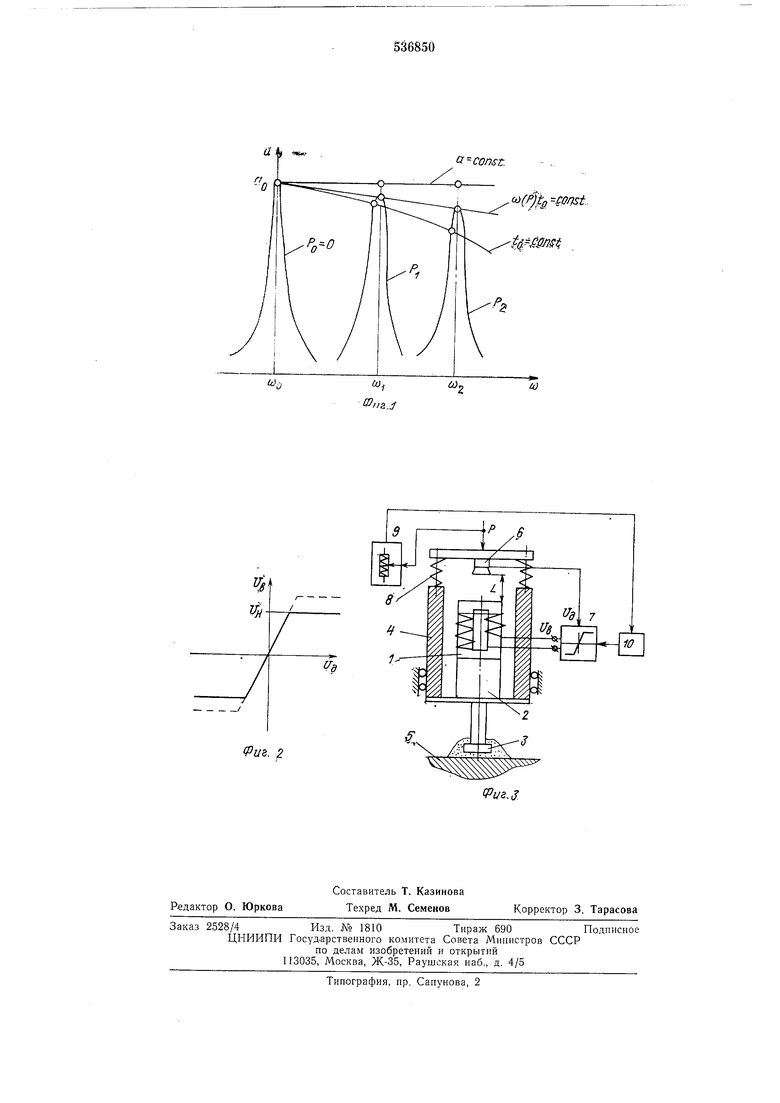
Для того, чтобы скомпенсировать это уменьшение и обеспечить стабилизацию амплитуды на заданном уровне (a const), согласно предлагаемому способу изменяют коэффициент усиления сигнала, пропорционального перемещению одного из элементов колебательной системы. Если, например, характеристика усиления сигнала имеет вид, показанный на фиг. 2, где Ua - величина сигнала; t/в - напряжение питания электроакустического преобразователя, изменение коэффициента усиления и стабилизации колебаний достигается изменением уровня насыщения t/,, характеристики в функции нагрузки ((). Увеличивая t/H с возрастанием нагрузки, поддерживают заданный уровень колебаний инструмента.
Колебательная система станка (см. фиг. 3) содержит магнитострикционный преобразователь 1 и концентратор 2 с инструментом 3. Вся система, установленная в каретке 4, поджимается к обрабатываемому изделию 5 статическим усилием подачи Р. Возбуждение колебаний осуществляется при помощи цепи положительной обратной связи, содержащей датчик 6 и усилитель 7. Датчик установлен на упругих элементах 8, через которые усилие подачи Р передается на каретку 4.
Усилитель 7 имеет характеристику, приведенную на фиг. 2.
Уровень насыщения усилителя 7 регулируется цепью дополнительной обратной связи, 5 содержащей датчик 9, например потенциометр, и управляющий элемент 10.
Устройство работает следующим образом.
Датчик 6 воспринимает звуковую волну, излучаемую свободным торцом магнитострик0 ционного преобразователя 1. Сигнал с датчика, пропорциональный движению свободного торца магнитострикционного преобразователя, преобразуется усилителем 7 и подается с запаздыванием на обмотку возбуждения магнито5 стриктора. Запаздывание определяется временем прохождения звуковой волны промежутка L от торца магнитострикционного преобразователя до датчика. Синхронно с увеличением усилия подачи Р вследствие сжатия 0 пружин 8 расстояние L, а следовательно, и запаздывание уменьшаются. Жесткость упругих элементов подобрана таким образом, что выполняется резонансное соотношение
со (Р)/о const.
Одновременно с этим при помощи датчика 9 регистрируется усилие подачи и через управляющий элемент 10 изменяется уровень насыщения усилителя 7 (пунктирная линия на фиг. 2).
Формула изобретения
1. Способ автоматической настройки ультразвуковых станков под нагрузкой, при котором измеряют сигнал, пропорциональный перемещениям одного из элементов колебательной системы станка, производят усиление сигнала и подают его с запаздыванием в цепь возбуждения электроакустического преобразователя станка, отличающийся тем, что, с целью поддержания максимальных амплитуд колебаний инструмента при изменении нагрузки, время запаздывания синхронно уменьшают при увеличении усилия подачи.
2. Способ по п. 1, отличающийся тем, что с увеличением усилия подачи увеличивают коэффициент усиления сигнала.
а const.
CP)
.Ш
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВОЗБУЖДЕНИЯ И АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ РЕЗОНАНСНЫХ КОЛЕБАНИЙ УЛЬТРАЗВУКОВЫХ СИСТЕМ | 2007 |
|
RU2350405C2 |
| АКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБРАЗЦА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2044298C1 |
| Способ поддержания резонансных колебаний механической системы и устройство для его осуществления | 1989 |
|
SU1726055A1 |
| ТВЕРДОМЕР | 1992 |
|
RU2045024C1 |
| Преобразователь электроакустического импедансного твердомера | 1985 |
|
SU1293554A1 |
| Способ подстройки частоты источника питания магнитострикционного электроакустического преобразователя | 1990 |
|
SU1759481A1 |
| СПОСОБ ЭЛЕКТРОАКУСТИЧЕСКОГО КОНТРОЛЯ ТВЕРДОСТИ МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2045025C1 |
| СПОСОБ КОМПЕНСАЦИИ ГИСТЕРЕЗИСОВ СТРИКЦИОННЫХ УСТРОЙСТВ | 1992 |
|
RU2069109C1 |
| СПОСОБ КОНТРОЛЯ ТВЕРДОСТИ МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2042943C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ ЭЛЕКТРОАКУСТИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ | 1997 |
|
RU2180275C2 |
fPus. 2
