Изобретение относится к испытательной технике, а именно к контролю физико-механических свойств материалов путем вдавливания индентора под нагрузкой и может быть использовано для неразрушающего контроля твердости и модуля упругости изделий.
Известен способ контроля физико-механических свойств материалов [1] заключающийся в том, что в электроакустическом преобразователе твердости возбуждают резонансные колебания и измеряют их частоту при внедрении в материал инденторов различной формулы, а о контролируемой твердости материала судят по отношению или разности этих частот.
Недостатком способа является низкая точность измерения за счет слабо выраженной зависимости между твердостью контролируемого материала и резонансной частоты колебаний электроакустического преобразователя в контакте с материалом, а также за счет нелинейного характера этой зависимости. Кроме того, способ предполагает неоднократное повторение контакта с применением различных инденторов, что снижает его оперативность. Наконец, для осуществления способа необходимо заранее знать и вводить в алгоритм преобразования твердости в качестве аргумента значения модуля упругости контролируемого материала.
Наиболее близким к предлагаемому по технической сущности и достигаемому эффекту является способ контроля твердости материала [2] заключающийся в том, что в материал вдавливают индентор, возбуждают его колебания импульсным воздействием и измеряют декремент затухания колебательного процесса, по величине которого судят о твердости.
Способ контроля твердости материалов осуществляется устройством, содержащим магнитострикционный стержень с жестко закрепленными на нем индентором, датчиком колебательной скорости и инерциальной массой с пружиной, взаимодействующей со стержнем, катушку возбуждения стержня с нагруженным на нее импульсным генератором, выход которого через второй формирователь импульсов соединен также с первым блоком стробирования, а через блок задержки и первый формирователь импульсов соединен со вторым блоком стробирования, которые через свои соответственно первый и второй логарифмические усилители и второй и третий амплитудные детекторы соединены со входами арифметического блока, выход которого подключен с индикатором, причем информационные входы первого и второго блоков стробирования соединены между собой и последовательно через усилитель и первый амплитудный детектор с датчиком колебательной скорости.
Недостатком известного способа является низкая точность контроля твердости вследствие методической погрешности, обусловленной неучтенным влиянием на декремент затухания инерциальной колебательной массы электроакустического преобразователя, особенно в начальной фазе развития переходного процесса колебательной скорости. Это влияние выражается, в частности, в конечном времени нарастания переднего фронта амплитуды колебательной скорости от нулевого значения до своего максимума. Последствия этого влияния присутствуют и в затухающей фазе переходного процесса, проявляясь в виде неучтенного способом прототипа поправочного нелинейного коэффициента зависимости между контролируемой твердостью и измеряемой величиной декремента затухания.
Недостатком устройства является то, что оно не позволяет измерить истинную амплитуду информационного сигнала колебательной скорости. Это является следствием вышеуказанного недостатка известного способа. Наконец, известный способ и устройство не обеспечивают контроля модуля упругости материала как составляющей его механического импеданса.
Цель изобретения повышение точности контроля твердости и обеспечение возможности измерения модуля упругости материалов.
Цель достигается тем, что в отличии от известного способа контроля твердости материала, заключающегося в том, что в материал вдавливают индентор, жестко соединенный со стержнем магнитострикционного преобразователя, импульсно возбуждают последний и измеряют частоту его затухающих колебаний, по которой судят о твердости материала, в предполагаемом способе дополнительно измеряют колебательную скорость и определяют интегральную площадь, ограниченную затухающим сигналом колебательной скорости, определяют модуль упругости материала по формуле
Ex измеряют резонансную частоту затухающих колебаний и по соотношению этой частоты и модуля упругости находят твердость материала по формуле
измеряют резонансную частоту затухающих колебаний и по соотношению этой частоты и модуля упругости находят твердость материала по формуле
Rx=2M , где Ех модуль упругости материала, кг/с2);
, где Ех модуль упругости материала, кг/с2);
Rx твердость материала, кг/c;
Fo амплитуда тестовой силы воздействия, кг м/с2;
Sx интегральная площадь функции колебательной скорости затухающего процесса, м;
М масса колебательной системы, кг;
ωр резонансная частота резонансных колебаний, 1/с.
Сущность способа состоит в следующем.
Импульсным воздействием активируют колебательный процесс электроакустического преобразователя твердости, находящегося в контакте с материалом под нагрузкой. При этом внедренный в материал индентор начинает колебаться с затухающей амплитудой на резонансной частоте преобразователя. Характеристики этого колебательного процесса определяются импульсом тестовой силы воздействия и параметрами механического импеданса контролируемого материала. Колебательная скорость индентора в операторной форме описывается уравнением
vx(p) 
 , (1) где Р оператор Лапласса;
, (1) где Р оператор Лапласса;
v(p) изображение колебательной скорости; изображение тестового импульса силы;
изображение тестового импульса силы;
Rx твердость материала (активная составляющая его импеданса);
М инерциальная масса колебательной системы;
Ех модуль упругости материала;
Zx(p) полный импеданс механического сопротивления преобразователя в контакте с материалом.
После предварительного искусственного преобразования (1) в виде
v(p) 
 (2) оригинал изображения колебательной скорости (1, 2) во временной форме запишется как
(2) оригинал изображения колебательной скорости (1, 2) во временной форме запишется как
vx(t)  eβt·sinωpt=Aoeβt·sinωpt (3) где β постоянная времени затухания колебательного процесса;
eβt·sinωpt=Aoeβt·sinωpt (3) где β постоянная времени затухания колебательного процесса;
ωp его резонансная частота;
Ао амплитудный коэффициент уравнения (3).
Причем характеристические постоянные колебательного процесса равны
β 
ωp (4)
(4)
Ao
Очевидно, что амплитуда переднего фронта Ао не может быть измерена непосредственно, так как при t ->> 0 на основании (3) имеем v(t ->> 0) ->> 0. Это обусловлено конечным временем на "раскачку" инерциальной массы М преобразователя под действием импульса силы Fo до максимальной амплитуды Аmax. Динамика фронта нарастания колебательной скорости описывается ускорением колебательной системы в начальный момент времени и временем нарастания переднего фронта tm до значения Amax < Ao на основании
a 
 =Aoeβt(β·sinωpt-ωp·(cosωt)
=Aoeβt(β·sinωpt-ωp·(cosωt) = -Aoωp=
= -Aoωp=  (5)
(5) 0 _→ tm _
0 _→ tm _  (6)
(6)
При этом значение первого максимума Аmax колебательной скорости действительно всегда меньше амплитуды Ао за счет диссипативного характера колебательного процесса, и эта разница растет с уменьшением β т.е. при контроле относительно "мягких" материалов.
На основании (5) и (6) видно, что устройству прототипа присуща методическая погрешность, обусловленная невозможностью непосредственного измерения амплитуды Ао и погрешностью от влияния на алгоритм измерения декремента затухания разницы между истинной амплитудой Аоапроксимирующей затухание экспоненты и измеренной Аmax в момент времени tm.
Кроме того декремент затухания этого процесса не является характеристикой, пропорциональной твердости в принципе, так как процесс носит сложный апериодический характер и апроксимируется на самом деле не экспоненциальной огибающей. Действительно, на основании (1) уравнение этой огибающей можно получить в виде
vx(p) 
v (t)
(t) 
 e
e -e
-e , (7) где P1P2= _
, (7) где P1P2= _ 
 β∓ωp (8) корни (полюсы) характеристического уравнения (1).
β∓ωp (8) корни (полюсы) характеристического уравнения (1).
Причем, первая экспонента выражения (7) характеризует процесс нарастания амплитуды апроксимирующей колебательную скорость vx(t) кривой, а вторая постоянную времени ее затухания. Очевидно, что результирующая алгебраическую сумму этих составляющих процесса (7) апроксимирующая кривая не является тождественно экспоненциальной и декремент ее затухания не может быть получен по алгоритму прототипа с достаточной точностью. Погрешность известного устройства при этом зависит от отношения P1/P2, т.е. от соотношения твердости и модуля упругости контролируемого материала. В конечном итоге это проявляется в снижении точности контроля твердости способа прототипа.
С целью устранения этих недостатков в предлагаемом способе измеряют интегральную площадь Sx колебательной скорости v(t). Эта операция описывается на основании (3) и (4) математическим уравнением
Sx vx(t)dt=Ao·e
vx(t)dt=Ao·e
0-A
 (9) откуда определяют искомый модуль упругости Ех по формуле
(9) откуда определяют искомый модуль упругости Ех по формуле
Ex (10)
(10)
Затем измеряют значение резонансной частоты ωр и по соотношению этой частоты и полученной величины модуля упругости Ех контролируемого материала на основании (4) определяют твердость материала по формуле
Rx=2M (11)
(11)
Отличие устройства, позволяющего осуществить способ, состоит в том, что в известное устройство, содержащее магнитострикционный стержень в жестко закрепленными на нем индентором, датчиком колебательной скорости и инерциальной массой с пружиной, взаимодействующей со стержнем, подключенный к датчику усилитель напряжения, вычислительный блок и подключенный к его выходу первый индикатор, первый формирователь импульсов, генератор импульсов, соединенный с катушкой возбуждения стержня и с входом второго формирователя импульсов, а также блок стробирования с памятью, дополнительно введены подключенные к выходу усилителя компаратор нуля и интегратор, выход которого последовательно через блок стробирования и блок деления соединен со вторым индикатором и со вторым входом вычислительного блока, а выход компаратора нуля последовательно через измеритель частоты соединен с первым входом вычислительного блока, причем вход управления блока стробирования подключен к выходу второго и входу первого формирователей импульсов, а выход последнего соединен с выходом управления ключа, включенного в цепь обратной связи интегратора.
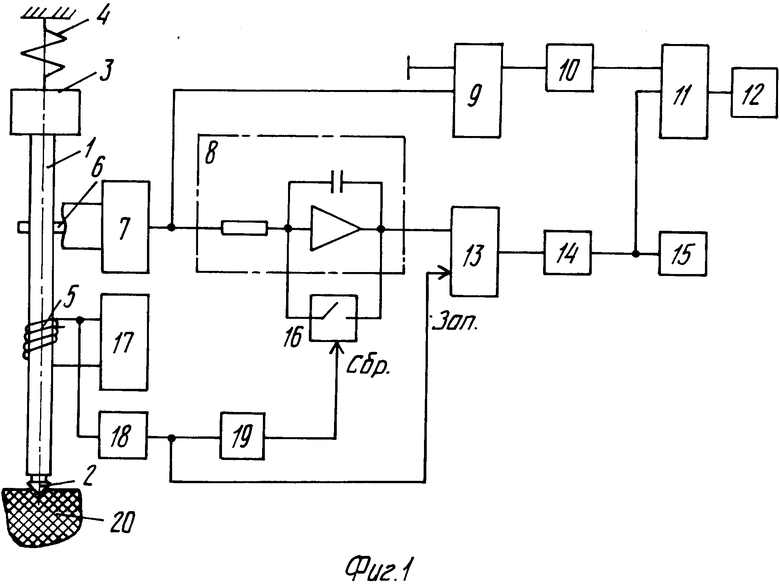
На фиг. 1 представлена блок-схема устройства для осуществления способа; на фиг. 2 временные диаграммы работы блоков устройства.
Устройство для контроля физико-механических свойств материалов содержит магнитострикционный стержень 1 с жестко закрепленными на нем индентором 2 и инерциальной массой 3 с пружиной 4, взаимодействующей со стержнем 2, катушку возбуждения 5 стержня и датчик 6 колебательной скорости, подключенный через усилитель 7 к интегратору 8 и компаратору нуля 9, выход которого последовательно через измеритель частоты 10 соединен с первым входом вычислительного блока 11, выход которого нагружен на первый индикатор 12. Выход интегратора 8 соединен последовательно через блок стробирования 13 и блок деления 14 со вторым индикатором 15, вход которого подключен также ко второму входу вычислительного блока 11, причем в цепь обратной связи интегратора 8 включен управляемый ключ 16. Выход генератора 8 включен управляемый ключ 16. Выход генератора импульсов 17 нагружен на катушку возбуждения стержня 5 и последовательно через второй формирователь импульсов 18 соединен с выходом управления блока стробирования 13 и входом первого формирователя импульсов 19, выход которого подключен к входу управления ключа 16. Контролируемое изделие 20.
Устройство работает следующим образом.
Индентор 2 под действием статической силы сжатой пружины 4 внедряется в испытуемый материал 20. Глубина его внедрения, а следовательно и площадь контакта поверхности индентора с материалом, определяется его твердостью. За счет действия импульса тока от генератора 17 в катушке 5 на магнитострикционный стержень 1 оказывается импульсное тестовое воздействие силой Fo, активирующее в системе электроакустического преобразователя твердости диссипативный колебательный процесс. Амплитудные и временные параметры этого процесса определяются величиной этой силы, инерциальностью массы подвижной системы преобразователя и параметрами контролируемой твердости Rx и упругости материала Ех.
Колебательная скорость затухающего автоколебательного процесса преобразователя определена динамическим балансом реактивных и активных составляющих полного импеданса механического сопротивления материала 20 и инерциальностью подвижной массы 3 преобразователя. Колебательная скорость vx(t) описывается при этом уравнением (3) с учетом (4).
Датчик колебательной скорости 6 (например, пьезоэлектрический преобразователь) вырабатывает электрический сигнал, пропорциональный колебательной скорости стержня 2. Сигнал усиливают усилителем 7 и подают на вход компаратора нуля 9 и интегратора 8. Диаграмма напряжения с выхода усилителя 7 приведена на фиг. 2а.
В предлагаемом устройстве, реализующем предлагаемый способ, интегральную площадь сигнала колебательной скорости Sx измеряют как вольт-секундную площадь напряжения с датчика колебательной скорости 5 путем непосредственного его интегрирования на основании (9) посредством интегратора 8 (фиг. 2б). В начале каждого цикла измерения формируют импульс записи предыдущих результатов в память блока стробирования 14 (фиг. 2в) и последующий сброс интегратора 8 в нулевое состояние через управляемый ключ 16 (фиг. 2г), чем интегратор 8 подготавливается к измерению в каждом последующем цикле.
Блок деления 14 реализует алгоритм (10) для нахождения модуля упругости Ех как величины, обратно пропорциональной вольт-секундной площади Sx. Результаты вычислений поступают на индикатор 15, проградуированный в значениях Ех.
Таким образом, модуль упругости Ех определяют инвариантно и независимо от твердости Rx контролируемого материала. Результат этого измерения поступает также на вычислительный блок 11 в качестве аргумента для определения твердости Rx на основании уравнения (11). В качестве второго аргумента уравнения измеряют собственную резонансную частоту ωр колебательной скорости vx(t).
Измерение осуществляют посредством измерителя частоты 10, соединенного со вторым входом вычислителя 11. Учитывая, что процесс развития колебательной скорости носит затухающий характер, сигнал предварительно компарируют относительно нуля в блоке 9. Это обеспечивает устойчивую к амплитуде измерительного сигнала vx(t) работу измерителя частоты 10. Вид компарированного входного сигнала vx(t) приведен на фиг. 2д, напряжение на выходе измерителя частоты 10 на фиг. 2е. Также показан вид напряжения на выходе блока деления 14, обратно пропорциональный вольт-секундной площади Sx выхода интегратора 9 в конце каждого цикла измерения.
Результаты измерения обоих составляющих механического импеданса контролируемого материала поступают на индикаторы 12 и 15 (фиг. 2ж).
Изобретение по сравнению с прототипом обеспечивает получение ряда дополнительных преимуществ при использовании в контрольно-измерительной технике адеструктурной импедансометрии.
Полученные уравнения преобразования (10) и (11) выведены аналитически без ограничения применимости, что обеспечивает использование способа во всем диапазоне изменения контролируемых физико-механических свойств материалов. Это позволяет расширить номенклатуру контролируемых изделий и область использования предлагаемого в различных отраслях науки и техники, что проявляется как дополнительный положительный эффект.
Вследствие полученной возможности измерения модуля упругости в алгоритмическом единстве с неразрушающим контролем твердости материалов, можно проводить исследования и контроль изделий с заранее неизвестными физико-механическими свойствами и слежение за их параметрами в процессе эксплуатации в сложных термомеханических условиях, когда наблюдаются тенденции "отпускания" материала.
Вследствие интегрального характера уравнения преобразования (9) модуля упругости Ех повышается помехоустойчивость измерения в промышленных условиях современного высокоэнергетического производства с присущим ему широким спектром помех общего вида.
Наконец, устройство для осуществления способа легко реализуется на современной микроэлектронной элементной базе, что способствует снижению себестоимости одновременно с повышением технологического уровня его производства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭЛЕКТРОАКУСТИЧЕСКОГО КОНТРОЛЯ ТВЕРДОСТИ МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2045025C1 |
| АКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБРАЗЦА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2044298C1 |
| ЭЛЕКТРОАКУСТИЧЕСКИЙ ТВЕРДОМЕР | 1992 |
|
RU2042942C1 |
| ТВЕРДОМЕР | 1992 |
|
RU2045024C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2047157C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК МАТЕРИАЛА ДВИЖУЩЕГОСЯ ЛИСТОВОГО ПРОКАТА | 2003 |
|
RU2234081C1 |
| Способ контроля твердости материалов и устройство для его осуществления | 1981 |
|
SU989378A1 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2371714C2 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2365910C2 |
| СЧЕТЧИК ЭЛЕКТРОЭНЕРГИИ | 1995 |
|
RU2091803C1 |

Изобретение относится к контролю качества материала и может быть использовано для определения его твердости, которая контролируется по параметрам колебаний индентора внедряемого в материал. Сущность изобретения: импульсом возбуждают магнитостриктор жестко связанный с индентором и определяют интегральную площадь, ограниченную затухающим сигналом колебательной скорости. Устройство для реализации способа выполнено в виде блока обработки сигналов преобразователя магнитостриктора, схема которого составлена из интегратора, измерителя частоты, компаратора и управляемых ключей. 2 с.п. ф-лы, 2 ил.

измеряют резонансную частоту затухающих колебаний и по соотношению этой частоты и модуля упругости находят твердость материала по формуле
где Ex модуль упругости материала, кг/см2;
Rx твердость материала, кг/с;
Fо амплитуда тестовой силы воздействия, кг/м/с;
Sx интегральная площадь функции колебательной скорости затухающего процесса, м;
M масса колебательной системы, кг;
ωр угловая частота резонансных колебаний, 1/с.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ контроля твердости материалов и устройство для его осуществления | 1981 |
|
SU989378A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
