Изобретение относится к области автоматизации технологических процессов и предназначено для получения механических колебаний ультразвуковой частоты с использованием электрической энергии.
Известен ультразвуковой генератор с фазовой автоподстройкой частоты, содержащий последовательно соединенные задающий генератор и усилитель мощности, связанный с ультразвуковым преобразователем, соединенным с выходом датчика тока, а также звено фазовой автоподстройки частоты, связанное с регулировочным элементом, выходом соединенное со входом задающего генератора (RU 25699).
Недостатком известного устройства является невозможность реализовать всю амплитудно-частотную характеристику, так как существуют ветви, неустойчивые в режимах вынужденных колебаний. Именно по этой причине устройство не обладает достаточной стабильностью, что уменьшает возможную технологическую нагрузку.
Возможные конфигурации амплитудно-частотных характеристик такой ультразвуковой технологической системы при различных значениях силы подачи Р изображены на фиг.1. Тонкими сплошными линиями показаны скелетные кривые а, определяющие зависимость собственной частоты нелинейной системы от амплитуды колебаний, и линия предельных амплитуд б, являющаяся огибающей резонансных кривых.
При Р=0, т.е. на холостом ходу, имеем обычную амплитудно-частотную характеристику линейной колебательной системы. При увеличении силы подачи до некоторого критического значения Рkp характер резонансной кривой не меняется, а резонансная частота смещается в область более высоких частот. При превышении критического значения силы подачи происходит резкое изменение вида резонансной кривой. Появляется неустойчивая ветвь, показанная штрихпунктирной линией. При этом выход на резонансный режим может быть осуществлен либо затягиванием колебаний из области более высоких частот, либо жестким запуском, сообщая системе дополнительную энергию. Но даже если удается выйти на резонансный режим, то удержаться в окрестности резонансного состояния весьма проблематично, поскольку малое уменьшение частоты возбуждения либо малое увеличение нагрузки приводят к срыву колебаний, как показано вертикальной стрелкой на фиг.1.
Из этого следует необходимость подстройки частоты при изменении условий работы ультразвуковой системы. Видно, что при малом изменении условий происходит резкое уменьшение амплитуды колебаний системы, настроенной на собственную частоту ω0. В устройстве-аналоге, как и в большинстве известных устройств с реализацией вынужденных колебаний, делается попытка реализации подстройки путем изменения частоты задающего генератора. При этом принимается во внимание тот факт, что на резонансе сдвиг фазы между напряжением и током в цепи питания есть величина постоянная и отклонение от этого постоянного значения используется в качестве критерия настройки на резонансную частоту.
Следует отметить, что какова бы ни была структура блока управления частотой задающего генератора, работающая в режиме вынужденных колебаний схема работоспособна только при усилиях подачи Р<Рkp, пока не проявляются нелинейные эффекты в поведении резонансных кривых. При P>Pkp любое перерегулирование приводит к срыву колебаний. Поэтому известное устройство не позволяет использовать все потенциальные возможности ультразвуковых технологических систем. Дело в том, что реализация нелинейных резонансных режимов дала бы возможность работать при усилиях подачи, в десятки раз превышающих критическую величину Рkp.
Наиболее близким техническим решением является устройство для возбуждения и автоматической стабилизации резонансных колебаний ультразвуковых систем, содержащее электроакустический преобразователь и датчик колебаний, подсоединенные к усилителю, включенному в цепь обратной связи, и источник мощности (SU 483148). В качестве датчика колебаний используется микрофон, установленный с зазором по отношению к свободному торцу колебательной системы, возбуждаемой электроакустическим преобразователем.
Недостатком этого устройства является конструктивная сложность установки микрофона в корпусе колебательной системы, обусловленная необходимостью обеспечения излучения бегущей волны свободным торцом колебательной системы, поскольку любые отражения волны от стенок корпуса приводят к образованию стоячих волн и делают устройство неработоспособным.
Задачей изобретения является устранение указанных недостатков. Техническим результатом, достигаемым при реализации изобретения, является упрощение конструкции устройства для возбуждения и стабилизации ультразвуковых систем, увеличение возможной технологической нагрузки и повышение стабильности работы устройства. Поставленная задача решается, а технический результат достигается тем, что устройство для возбуждения и автоматической стабилизации резонансных колебаний ультразвуковых систем, содержащее электроакустический преобразователь, подсоединенный к усилителю, включенному в цепь обратной связи, и источник мощности, снабжено датчиком силы тока в цепи питания электроакустического преобразователя, организованной посредством цепи обратной связи, которая снабжена фазовращателем, вход которого присоединен к датчику силы тока, а выход связан с входом усилителя. Предлагаемое устройство лишено недостатка прототипа, поскольку обратная связь организуется по электрическим, а не по механическим параметрам.
На фиг.1 показано изменение амплитудно-частотных характеристик ультразвуковой технологической системы, работающей на нелинейную технологическую нагрузку при ее изменении;
на фиг.2 изображена блок-схема устройства;
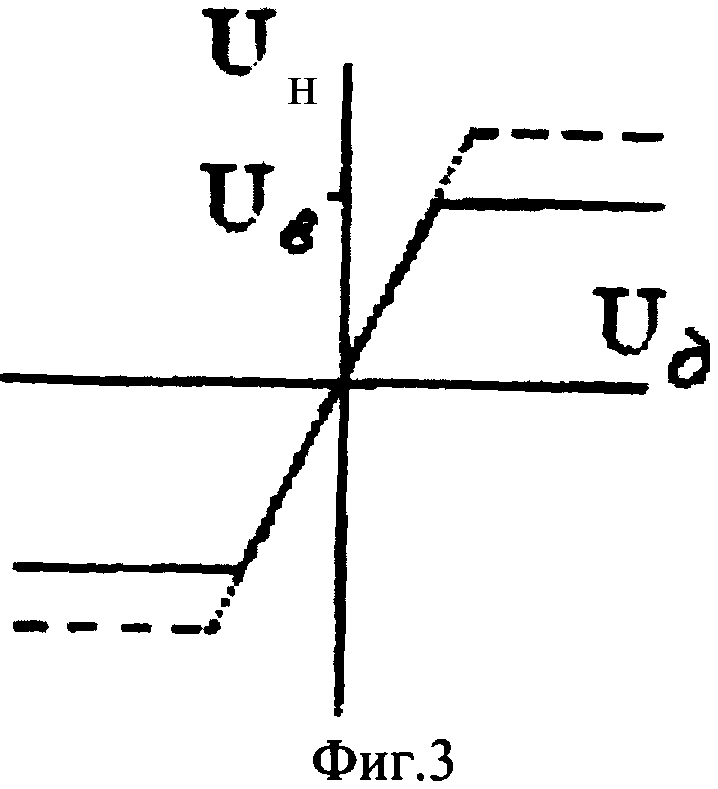
на фиг.3 - характеристика усилителя.
Устройство для возбуждения и автоматической стабилизации резонансных колебаний ультразвуковых систем содержит колебательную систему, ультразвуковые колебания которой возбуждаются электроакустическим, например пьезоэлектрическим, преобразователем 1, подсоединенный к усилителю 2, включенному в цепь обратной связи, и источник мощности 3. Датчик 4 силы тока включен в цепь питания электроакустического преобразователя 1, организованной посредством цепи обратной связи. Также цепь обратной снабжена фазовращателем 5, вход которого присоединен к датчику силы тока 4, а выход связан с входом усилителя 2. На обкладки преобразователя 1 подается переменное электрическое напряжение. В результате возбуждаются механические колебания, которые передаются рабочему инструменту, установленному на свободном конце концентратора. Вся система поджимается к обрабатываемому изделию (отмечено штриховкой) статической силой Р (фиг.2). Вибрирующий инструмент производит технологическую операцию. Эффективность выполнения технологического процесса зависит главным образом от величины усилия прижима и амплитуды колебаний инструмента. Чем эти величины больше, тем выше производительность устройства.
В указанной схеме отсутствует задающий генератор и частота колебаний устройства не навязывается устройству извне. Система работает не в режиме вынужденных колебаний, а в режиме автоколебаний. В этом случае колебания возбуждаются с помощью цепи положительной обратной связи.
В предлагаемом устройстве цепь положительной обратной связи строится с использованием электрических параметров, а именно силы тока в цепи питания преобразователя. Для обеспечения возбуждения и поддержания резонансных колебаний при изменении технологической нагрузки в широких пределах в цепь обратной связи включен фазовращатель, который обеспечивает соответствующий резонансному режиму сдвиг фазы между током и напряжением питания преобразователя.
Так как устройство работает в режиме автоколебаний, нелинейный усилитель строится так, чтобы обеспечить самовозбуждение колебаний. Самовозбуждение происходит, если начальный коэффициент усиления достаточно велик. При релейной характеристике самовозбуждение происходит всегда. Амплитуда колебаний регулируется уровнем ограничения характеристики усилителя (фиг.3), где Uд - напряжение датчика, пропорциональное силе тока в цепи питания, a Uв - напряжение питания электроакустического преобразователя. Угол наклона начального участка характеристики определяет начальный коэффициент усиления. При превышении некоторой величины начального коэффициента усиления происходит самовозбуждение автоколебаний.
Амплитуда установившихся автоколебаний определяется уровнем насыщения Uв. При определенном значении сдвига фазы, задаваемого фазовращателем, колебания ультразвуковой системы происходят на ее резонансной частоте даже при ее изменениях вследствие изменения параметров системы или технологической нагрузки в широких пределах.
Благодаря реализации в устройстве автоколебательного режима изменением фазы в цепи обратной связи можно реализовать всю амплитудно-частотную характеристику, в том числе и ветви, неустойчивые в режимах вынужденных колебаний. Именно по этой причине заявленное устройство обладает абсолютной стабильностью и позволяет в десятки раз увеличивать технологическую нагрузку по сравнению с системами, работающими в режимах вынужденных колебаний при их одинаковой мощности.
Указанное устройство может быть использовано для точения, волочения проволоки, упрочняющей обработки поверхностей и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля качества изделий | 1988 |
|
SU1606925A1 |
| Ультразвуковой генератор | 1979 |
|
SU896760A1 |
| Самонастраивающаяся электромеханическая резонирующая система | 1976 |
|
SU612356A1 |
| АКУСТИЧЕСКИЙ ПЕРЕДАТЧИК СИСТЕМ АКУСТИЧЕСКОГО И РАДИОАКУСТИЧЕСКОГО ЗОНДИРОВАНИЯ | 1999 |
|
RU2172002C1 |
| Преобразователь электроакустического импедансного твердомера | 1985 |
|
SU1293554A1 |
| Устройство для ультразвуковойХиРуРгии | 1979 |
|
SU850068A1 |
| Устройство для возбуждения колебаний | 1989 |
|
SU1738378A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧАСТОТ АКУСТИЧЕСКОГО РЕЗОНАНСА ИССЛЕДУЕМЫХ ОБРАЗЦОВ В РЕЖИМЕ АВТОКОЛЕБАНИЙ | 1992 |
|
RU2054667C1 |
| УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО | 1992 |
|
RU2045239C1 |
| СПОСОБ ЭЛЕКТРОАКУСТИЧЕСКОГО КОНТРОЛЯ ТВЕРДОСТИ МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2045025C1 |

Изобретение относится к ультразвуковой технике и может быть использовано для получения механических колебаний ультразвуковой частоты с использованием электрической энергии. Устройство содержит электроакустический преобразователь, подсоединенный к усилителю, включенному в цепь обратной связи, и источник мощности. Также оно снабжено датчиком силы тока в цепи питания электроакустического преобразователя, организованной посредством цепи обратной связи, которая снабжена фазовращателем. Вход фазовращателя присоединен к датчику силы тока, а выход связан с входом усилителя. Технический результат заключается в упрощении конструкции, увеличении технологической нагрузки и повышении стабильности работы устройства. 3 ил.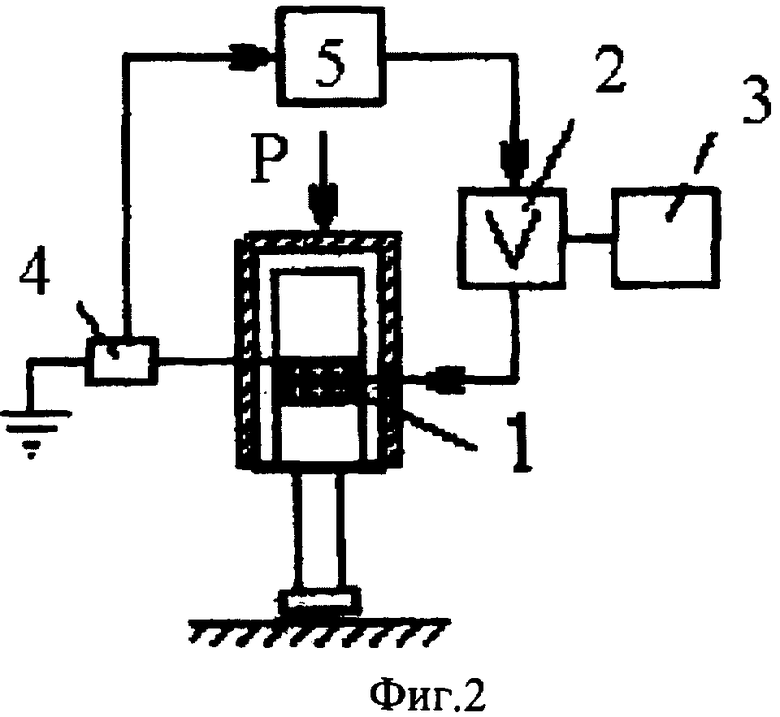
Устройство для возбуждения и автоматической стабилизации резонансных колебаний ультразвуковых систем, содержащее электроакустический преобразователь, подсоединенный к усилителю, включенному в цепь обратной связи, и источник мощности, отличающееся тем, что устройство снабжено датчиком силы тока в цепи питания электроакустического преобразователя, организованной посредством цепи обратной связи, которая снабжена фазовращателем, вход которого присоединен к датчику силы тока, а выход связан с входом усилителя.
| Аш Ж | |||
| и др | |||
| Датчики измерительных систем | |||
| - М.: Мир, 1992, с.480 | |||
| Левинтов С.Д., Борисов A.M | |||
| Бесконтактные магнитоупругие датчики крутящего момента | |||
| - М.: Энергоатомиздат, 1984, с.88 | |||
| US 5585571 А, 17.12.1996 | |||
| Устройство для измерения крутящих моментов | 1986 |
|
SU1506308A1 |

