Б основном авторском свидетельстве № 49125 описано грузозахватное приспособление для кип и тому подобных предметов в виде захватных клещей с поперечной связью, причем для удержания клещей в открытом виде применены расположенные на ; балке траверзы, действующие на попе- I речные связи клещей, а для обеспечеНИИ схождения клещей при захвате | балка и траверза сцепляются при помощи защелок, для раскрывания которых, с целью расцепления балки и траверзы, применен электромагнит..
В предлагаемом ныне грузозахватчике для указанной цели, вместо электромагнита, применено автоматически действующее устройство, в котором защелки поворотно установлены на поперечине, подвижной в вертикальном направлении относительно балки и подпираемой рычагами, на другом конце которых рас- i положены противовесы и собачки, I взаимодействующие со свободными концами защелок.
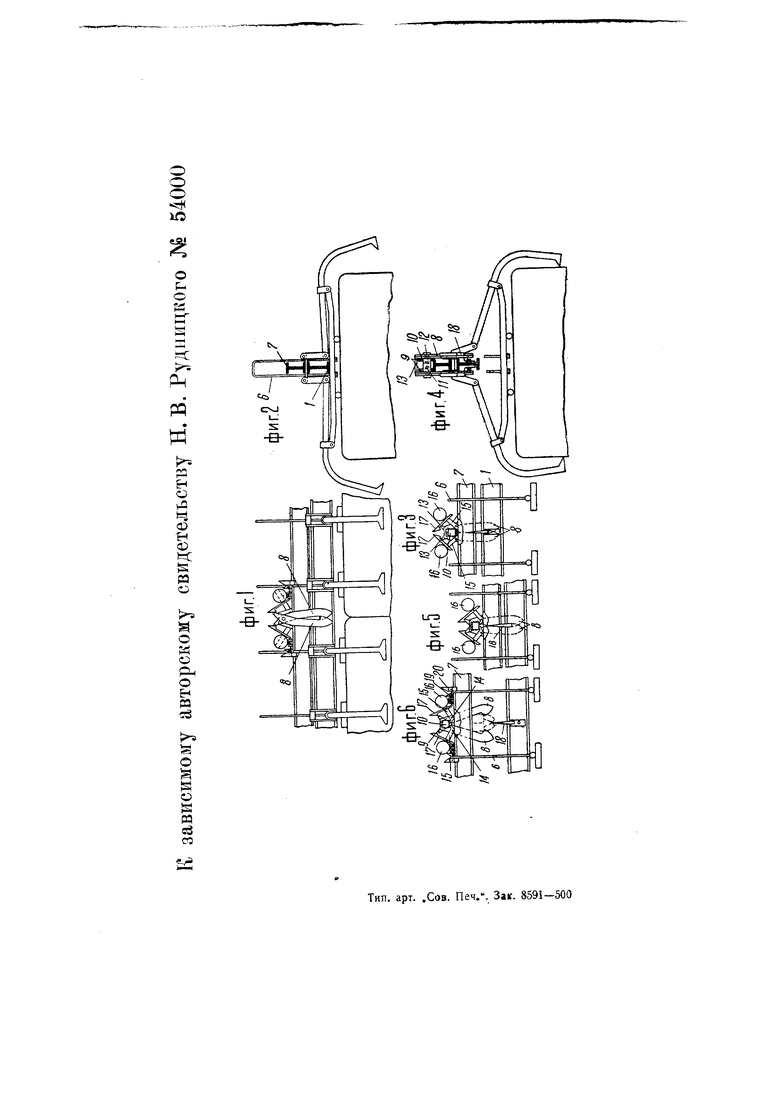
На чертеже фиг. 1 и 2 изображают вид сбоку и вид спереди грузозахватного приспособления с защелками в положении при начале подъема; фиг. 3 и 4-вид сбоку и вид спереди того же приспособления при положении защелок в момент захвата кип; фиг. 5 - вид сбоку приспособления при опускании и фиг. 6 - то же при вторичном подъеме захвата.
К верхней полке балки 7 приварены две пластины 9 (фиг. 4) с прямоугольными отверстиями, в которые заложена квадратная поперечина 10 (фиг. 3, 6). В поперечине закреплены при помощи щпилек // цапфы 72, несущие две пары защелок 8, расположенные по обе стороны балки 7; в верхней части защелки попарно соединены прутками 13. Шпильки 11 препятствуют горизонтальному перемещению поперечины 10, но оставляют свободным ее вертикальное перемещение в прямоугольных прорезах пластин 9.
В пластинах 9 закреплены оси 14 (фиг. 6) двух двуплечих рычагов 15,
снабженных противовесами 16 и собачками 17, могущими сцепляться с поперечными прутками 13 зао елок 8 (фиг. 3).
Под влиянием противовесов 16 рычаги 15 держат поперечину 10 в верхнем положении; собачки 17 не сцеплены с прутками 13 защелок 8 (фиг. 1), которые под влиянием собственного веса смыкаются и при полном сближении балки 7 с траверзой 7 зацепляются за пальцы 18, прикрепленные с обеих сторон траверзы 1; пальцы снабжены удлиненными вверх перьями, обеспечивающими направление защелок 6 на пальцы 18 во всех положениях балки и траверзы (фиг. 3).
При подъеме (фиг. 3 и 4) начинает движение балка 7, но поперечина 10, задержанная при посредстве защелок 8 траверзой 1, нажимает на короткие концы двуплечих рычагов 15 и переводит собачки 17 в положение готовности к сцеплению с прутками /5 защелок 8. Это сцепление неизбежно произойдет при опускании груза на новое место (фиг. 3), когда груз и траверза / остановятся, а балка 7 будет продолжать свое движение.
На фиг. 5 балка показана в положении, когда пальцы 18 еще не позволяют защелкам 8 разойтись; при дальнейшем опускании защелки 8 разгрузятся и, под влиянием противовесов 16 рычагов 15, разойдутся, размыкая балку 7 и траверзу /.
При следующем подъеме (фиг. 6) траверза / не тронется до тех пор, пока балка 7 не подхватит ее при посредстве траверз 6; в этот момент соседние с собачками траверзы вдавливаются между упорами 19 и 20,
укренленпыми на балке 7; упоры 20 укреплены неподвижно, а упоры 19 могут перемещаться в направлентгй оси балки 7, причем нажимают на нижние концы собачек /7 и выводят их из сцепления с защелками 8. На фиг. 6 изображен момент расцепления, после чего защелки S принимают положение, изображенное пунктиром.
При следующем опускании захвата на новый груз вся система приходит в положение, изображенное на фиг. 1 и 2. Упоры 19 отводятся в исходное положение спиральной пружиной.
Предмет изобретения.
1.Форма выполнения грузозахватного приспособления для кип и тому подобных предметов по п. 1 авторского свидетельства № 49125, отличающаяся тем, что для выключения
защелок 6 перед следующим захватом применено автоматически действующее устройство.
2.Форма выполнения грузозахватного приспособления по п. 1, отличающаяся тем, что защелки 5 поворотно установлены на поперечине Ш, подвижной по вертикали относительно балки 7 и подпираемой короткими плечами рычагов }5, поворотно укрепленных на балке 7 и несущих на другом плече противовесы 6 и собачки /7, взаимодействующие со свободными концами защелок 8.
3.В грузозахватном приспособлении по пп. 1 и 2 применение подпружиненных упоров 19, предназначенных для выключения собачек 17 и приводимых в действие траверзами 6 при верхнем положении балки 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное приспособление для кип и тому подобных предметов | 1936 |
|
SU49125A1 |
| Волочильный стан | 1936 |
|
SU48083A1 |
| Приспособление к гидравлическому прессу для попеременной подачи к пунсону с противоположных сторон пресса двух пресс-форм для граммофонных пластинок | 1934 |
|
SU49839A1 |
| Домкрат для подъема балок | 1940 |
|
SU67431A1 |
| Автоматические спаренные грузозахватные клещи | 1961 |
|
SU142005A1 |
| Приспособление для автоматического подъема ножей стригальных машин | 1929 |
|
SU17176A1 |
| Хлебопекарная конвейерная печь | 1940 |
|
SU62832A1 |
| Приспособление к трепальным машинам для автоматического съема холстов | 1937 |
|
SU53088A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1938 |
|
SU57816A1 |
| Машина для мытья, ополаскивания и сушки бутылок | 1927 |
|
SU25415A1 |