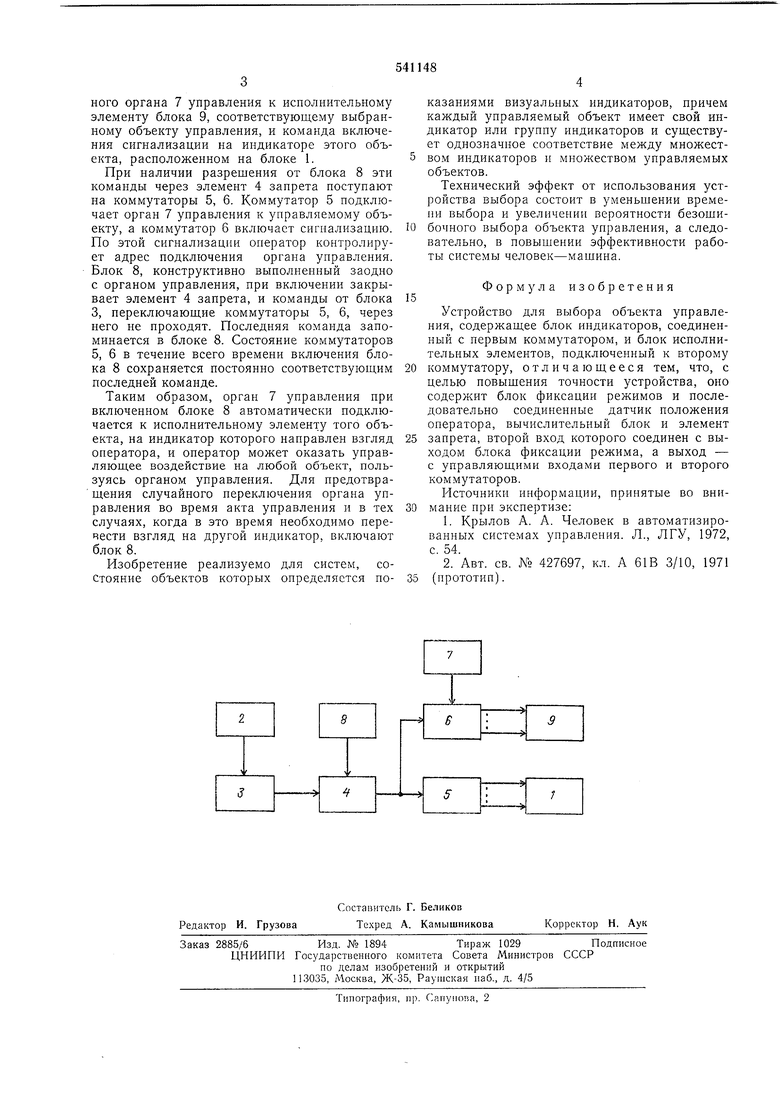
ного органа 7 управления к исполнительному элементу блока 9, соответствующему выбранному объекту управления, и команда включения сигнализации на индикаторе этого объекта, расположенном на блоке 1.
При наличии разрешения от блока 8 эти команды через элемент 4 запрета поступают на коммутаторы 5, 6. Коммутатор 5 подключает орган 7 управления к управляемому объекту, а коммутатор 6 включает сигнализацию. По этой сигнализации оператор контролирует адрес подключения органа управления. Блок 8, конструктивно выполненный заодно с органом управления, при включении закрывает элемент 4 запрета, и команды от блока 3, переключающие коммутаторы 5, 6, через него не проходят. Последняя команда запоминается в блоке 8. Состояние коммутаторов 5, 6 в течение всего времени включения блока 8 сохраняется постоянно соответствующим последней команде.
Таким образом, орган 7 управления при включенном блоке 8 автоматически подключается к исполнительному элементу того объекта, на индикатор которого направлен взгляд оиератора, и оиератор может оказать управляющее воздействие на любой объект, пользуясь органом управления. Для предотвращения случайного нереключения органа управления во время акта управления и в тех случаях, когда в это время необходимо перевести взгляд на другой индикатор, включают блок 8.
Изобретение реализуемо для систем, состояние объектов которых определяется показаниями визуальных индикаторов, причем каждый управляемый объект имеет свой индикатор или группу индикаторов и существует однозначное соответствие между множеством индикаторов и множеством управляемых объектов.
Технический эффект от использования устройства выбора состоит в уменьщении времени выбора и увеличении вероятности безощибочного выбора объекта управления, а следовательно, в повышении эффективности работы системы человек-мащнна.
Формула изобретения
15
Устройство для выбора объекта управления, содержащее блок индикаторов, соединенный с первым коммутатором, и блок исполнительных элементов, подключенный к второму
коммутатору, отличающееся тем, что, с целью новыщения точности устройства, оно содержит блок фиксации режимов и последовательно соединенные датчик положения оператора, вычислительный блок и элемент
запрета, второй вход которого соединен с выходом блока фиксации режима, а выход - с управляющими входами первого и второго коммутаторов. Источники ииформации, принятые во внимание ири экспертизе:
1.Крылов А. А. Человек в автоматизированных системах управления. Л., ЛГУ, 1972, с. 54.
2.Авт. св. N° 427697, кл. А 61В 3/10, 1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выбора объекта управления | 1977 |
|
SU673990A1 |
| Устройство для управления судовым агрегатом | 1975 |
|
SU596995A1 |
| Система программного управления | 1972 |
|
SU451985A1 |
| Устройство для предупреждения аварий-НыХ СиТуАций | 1979 |
|
SU840818A1 |
| ТЕЛЕВИЗИОННОЕ СРЕДСТВО НАБЛЮДЕНИЯ | 1993 |
|
RU2094956C1 |
| Устройство для централизованного контроля и управления | 1972 |
|
SU479137A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И КОНТРОЛЯ ПАРАМЕТРОВ | 1992 |
|
RU2029345C1 |
| Автоматизированная система полива | 1981 |
|
SU1047448A1 |
| Устройство для дистанционного автоматизированного управления шахтными конвейерными линиями | 1986 |
|
SU1579863A1 |
| ТЕЛЕМЕХАНИЧЕСКАЯ СИСТЕМА "ЛИЛАНА-ВИЯ" И СИГНАЛИЗАЦИОННОЕ ЗАГРАЖДЕНИЕ С ИЗВЕЩАТЕЛЕМ В.И. ЯЦКОВА | 2012 |
|
RU2491646C1 |
