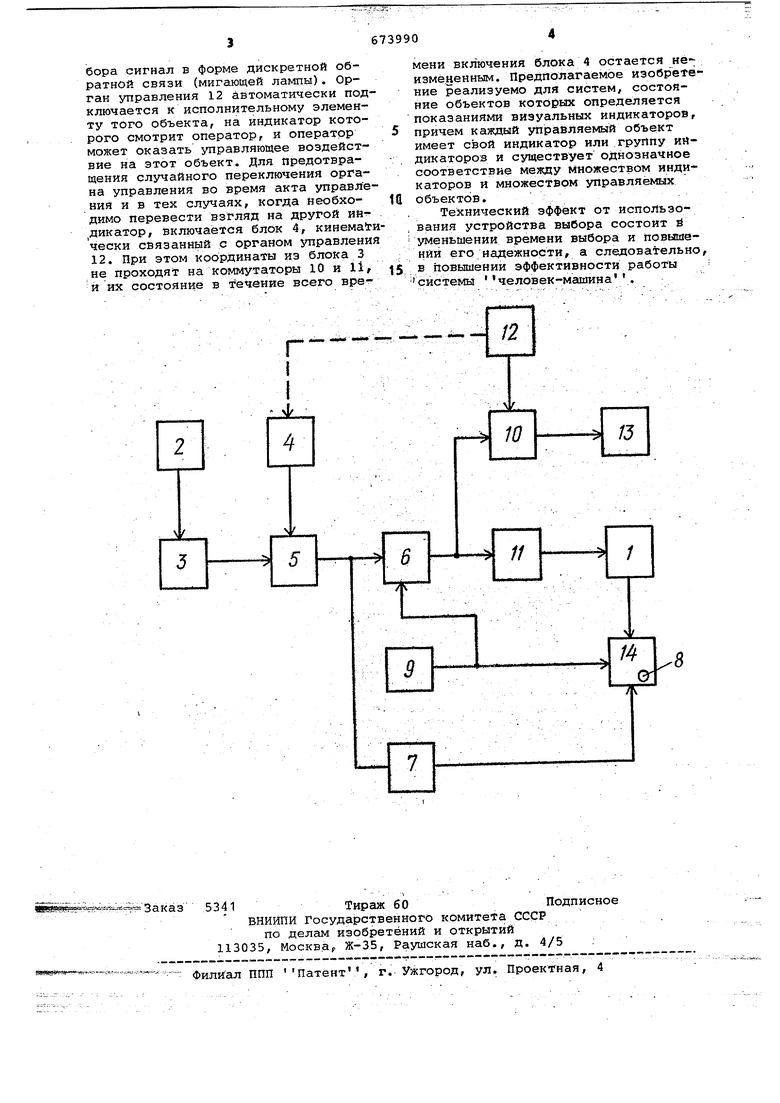
Изобретение относится к области технической кибернетики и может быть использовано при управлении большими комплексами объектов в системах че ловек-машина . . Известно избирательное устройст всГуТГраВлёНия, позволяющее выполнять выбор объекта управления l. Устройство содержит блок индикаторов, соединённый с первым коммутатором и блок исполнительных элементов, подключенный к второму коммутатору, а также связанный с коммутаторами номеронабиратель. Недостатком устройства яв яётся ручная коммутация при выборе объеКТа управления, что увеличивает Время выбора и снижает его надёж ность. - ; . Известно также устройство для вы бора объекта управления наиболее близкое по техническому решению к .предполагаемому изобретению,содерясаЩее первый коммутатор, соединенны с блоком исполнительных элементов и брганбм управления, кинематически связанным с блоком фиксации режима/ второй коммутатор, соединенный с бл KoiM индикаторов, и элемент запрета, Первый вход которого соединен с вЫходом блока фиксации , а втор через вычислительный блок - с ёыходЬм датчика положенияопераТо- ра 2 . Недостаток.известного устройства низкое быстродействие, связанное с М§обхбдимостью Неконтролируемого на вейёния головы или. глаза оператора на требуемый элемент блокаинДйкаторов.; Цель предлагаемого изобретения увеличение быстродействия и надежности устройства. Это достигается тем, что в устройртво введены блок визуального . отображения, Формирователь зон, бло формирования светового пятна и блок сравнения, выход которого соединен б йхойамИ. первого и второго коммута торов, первый вход - с выходом элеЙёй1:а запрета и через блок формироГёайий светового пятна - с первым вх дбм блока визуального отображения, а второй вход - с выходом формирова теля зон и вторым входом блока визу ального отображения, третий вход ко торого подключен к выходу блока индикаторов. -. Йа чертеже представлена структур ная с1сема описываемого устройства для выбора об ъекта уг1райлёния. Устройство содержит блок индикаторов 1, положений оператора 2, вычислйтельный блок 3, блок фиксации режима 4, элемент запрета 5, блок сравнения б, блок 7 формирования светового пятна 8, формировател зон 9, первый,и второй коммутаторы 10 и 11 соответственно, орган управления 12, блок исполнительных элементов 13 и блок визуального отображения 14. Устройство работает следующим образом. Оператор, собирая необходимую информацию, осматривает панель блока ийдикаторов 1-. При этом от датчика 2 поступает информация в вычислительный блок 3, где-ВЫЧИСЛЯЮТСЯ координаты точки фиксации взгляда оНератора или положение его головы. При наличии разрешения от блока фиксации режима 4 эти координаты поступают через элемент запрета 5 в блок сравнения б и блок 7 формирования светового пятна 8, На второй вход блока 6 поступает информация от формирователя границ зон 9. В блоке 6 Производится сравнение координатграниц зон, поступающих из формирователя 9, с координатами точки фиксации взгляда (или .углами поворота головы) оператора. Так как весь экран блока 14 разделен, на зоны, -каждая из которых содержит как минимум один индикатор, то при-этом определяется, к (Какому индикатору обратился оператор в данный момент времени и формируется сигнал на соответствующем вУходе блока ср1авнения б. Этот сигнал поступает на входы коммутаторов 10, 11. Коммутатор 10 подключает орган управления 12 к требуемому управляемому объекту в блоке исполнительных элементов 13. Коммутатор 11 включает сигнализацию в блоке 1. По этой Сй37 налйзации, например, в виде мигающей лампы у данного индикатора, оператор .контролирует правильность выбора адреса управления. Изображе- ние панели блока 1 с мигающим сигналом обратной связи для оператора поступает в блок 14, например в телевизионный монитор, где оно накладывается на изображение границ зон, поступающее из формирователя 9. Одновременно координаты точки фиксации взгляда (углы поворота головы) оператора с выхода элемента 5 поступает в блок 7 формирования светового пятна 8, отображаемого на экране блок.а 14. В результате в каждый момент времени оператор видит на экране изображение светового пятна в соответствующей зоне на фоне изображения блока индикаторов, что является для Него сигналом непрерывной обратной связи о коо.рдинатах точки фиксации взгляда (положения головы) относительно изображения« Оператору при считывании информации с индикатора дЬстаточно попасть в зону, в которой он расположен, пользуясь сигналом непрерывной обратной связи. При этом он получает дополнительный, подтверждающий правильность выбора сигнал в форме дискретной обратной связи (мигающей лампы). Орган управления 12 автоматически подключается к исполнительному элементу того объекта, на индикатор которого смотрит оператор, и оператор может оказать управляющее воздействие на этот объект. Для предотвращения случайного переключения органа управления во время акта управления и в тех случаях, когда необходимо перевести взгляд на другой ий дикатор, включается блок 4, кинематически связанный с органом управления 12. При этом координаты из блока 3 не проходят на коммутаторы 10 и li, и их состояние в течение всего вреГ
I
I
ф
мени включения блока 4 остается неизмё.ненным. Предполагаемое изобрете ние реализуемо для систем, состояние объектов которых определяется показаниями визуальных индикаторов, причем каяадый управляемый объект имеет свой индикатор или группу ийдикатороз и существует однозначное соответствие между Множеством индикаторов и множеством управляемых объектов.
Технический эффект от использо вания устройства выбора состоит и уменьшении времени выбора и повышении его.надежности, а следовательно в повышении эффективности работы
человек-машина
системы
12
W
/J
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления объектами | 1976 |
|
SU674038A1 |
| Устройство для измерения координат точек фиксации взгляда оператора | 1982 |
|
SU1090333A1 |
| Устройство для выбора объекта управления | 1973 |
|
SU541148A1 |
| Устройство для профессионального отбора операторов | 1990 |
|
SU1774366A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДЛЯ ТРЕНИРОВКИ АККОМОДАЦИИ ГЛАЗА | 2016 |
|
RU2623328C1 |
| Устройство для сигнализации состояния исполнительных механизмов | 1987 |
|
SU1453430A1 |
| СПОСОБ ОДНОВРЕМЕННОЙ ОЦЕНКИ СТЕПЕНИ ФУНКЦИОНАЛЬНОГО ПОДАВЛЕНИЯ ОДНОГО ГЛАЗА ДРУГИМ В ОБЛАСТИ ФИКСАЦИИ ВЗОРА И В РАЗНЫХ ТОЧКАХ ПОЛЯ ЗРЕНИЯ И КОМПЬЮТЕРИЗИРОВАННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645415C1 |
| Устройство для контроля видеосигнала | 1982 |
|
SU1069190A1 |
| СПОСОБ КОНТРОЛЯ ДЕЙСТВИЙ НАХОДЯЩЕГОСЯ НА БОРТУ КОСМИЧЕСКОГО АППАРАТА КОСМОНАВТА | 2016 |
|
RU2652721C2 |
| Устройство для диагностики состояния узлов аппарата магнитной записи | 1983 |
|
SU1136214A1 |
УСТРОЙСТВО ДЛЯ ВЫБОРА ОБЬ- ЕКТА УПРАВЛЕНИЯ, содержащее перйый коммутатор, соединенный с блоком исполнительных элементов и органом управления, кинематически связайнымс блоком фиксации режима, второй коммутатор, соединенный с блоком индикаторов и элемент запрета,первый вход кото- • рого соединён с выходом блока фиксации режима^ а второй вход через вычислительный блок - с выходом датчика положения оператора, 6 т л и ч а- ю щ е е с я тем, что, с целью повышения быстродействия и надежности устройства, оно содержит блок визуального отображения, формирователь зон, блок формирования светового пятна и блок сравнения, выход которого соединен с входами первого и второго коммутаторов, первый вход - с выходом элемента запрета и через блок формирования светового пятна - с первым входом блока визуального отображения , а второй вход - с выходом формирователя зон и вторым входом блока визуального отображения, третий вход которого подключен к выходу блока индикаторов.i(ЛС^ ь>&* ta* N*« •а^ •^С^«со
//
/
у
/4
-8
0
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Венда В.Ф | |||
| ''Инженерная психология и синтез систем, управления .отображения информации'\ М./'Машино-!строение',1975. | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для выбора объекта управления | 1973 |
|
SU541148A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| .' ' | |||
| . | |||
