(54) ПЛАНЕТАРНЫЙ МЕХАНИЗМ

1
Изобретение относится к области зубчатых передач, а именно к планетарным зубчф тым механизмам.
Известен планетарный мехшшзм, содержащий ось, два центральных колеса, водило 5 жестко закрепленное на этой оси, сателлитЧ ный блок 1з двух сателлитов, каждый из ко торых взаимодействует с одним из центральных колес. Сателлиты связаны меяшу собой посредством цилиндрическю: зубчатых колес Ю
Недостатком указанного планетарного механизма является невозможность получения переменной скорости врашения.
Известен планетарный механизм по авт. св. № 524030, вьтолненный в виде плане- 15 тарной зубчатой передачи, содержащей два центральных конических колеса, водило, сателлитный блок, установленный на водиле, из двух сателлитов, каждый из которых взаимодействует с одним из центральных колес,20 кинематическую цепь, замыкающую сателлиты, тормозные устройства для выборочного торможения центральных колес. Кинематическая цепь, замыкающая сателлиты, вьтолиен& в виде механизма мальтийского креста. 25
К недостаткам указаннзго механизма мс но отнести невозмояшость получения более чем двух режимов работы мехшгазма с разЛиными угловыми скоростями, ; Цель изобретения - получение четырех режимов работы механизма.
Это достигается тем, что центральные конические колеса установлены на раздельных, соосных валах, на одном из которых жестко закреплено водило, К1шематическая цетль, замьцсаюшая сателлиты, вьтолнена в виде установлеш1ой на водиле зубчатой передачи, содержащей цилиндрические и кош5ческие колеса, приводимой во вращение валом, ci осным валу водила.
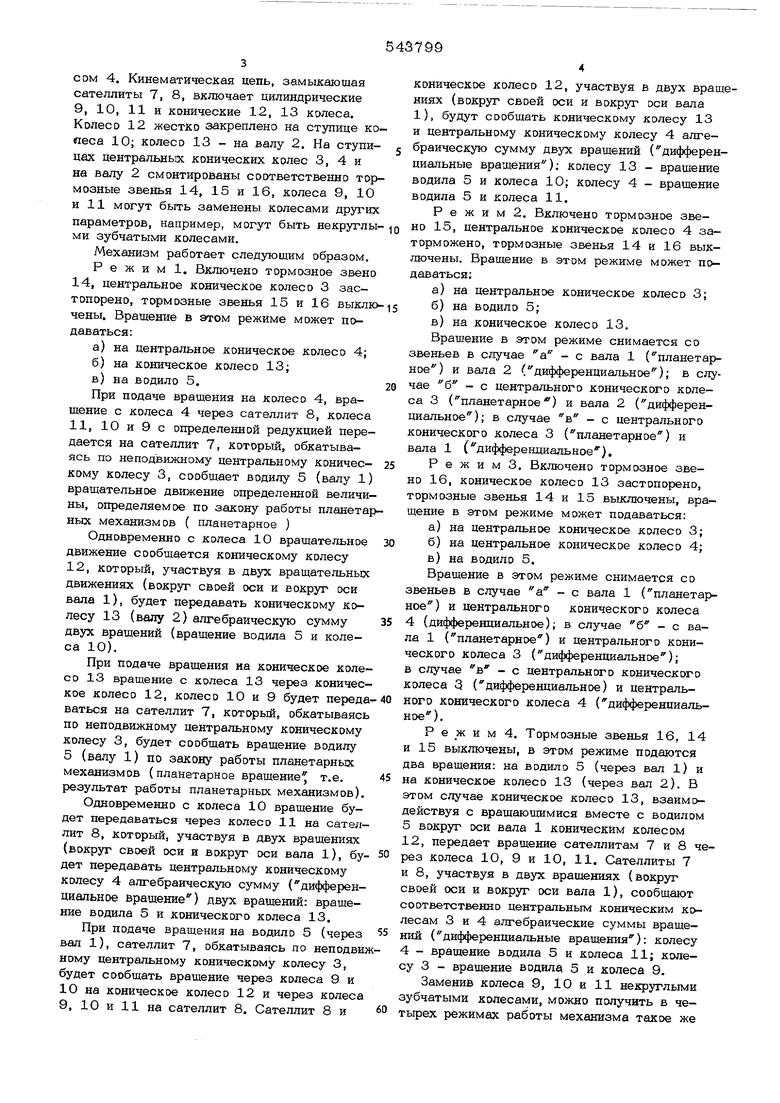
На фиг. 1 схематично показан предлагаемый планетарный механизм; на фиг. 2 - ег& кинематическая схема.
Планетарный MexaimaM содержит свободис установленные на валах 1, 2 ::ентральыые конические колеса 3 и 4, закрепленное иа валу 1 водило 5 с уравновешивающим грузом 6, сателлитный блок, установленный на |Водиле, сателл 1ты 7i 8. Сателлит 7 {кзак одействует с центральным коническим как;сом 4. Кинематическая цепь, замыкающая сателлиты 7, 8, включает цилиндрические 9, 10, 11 и конические 12, 13 колеса. Колесо 12 жестко закреплено на ступице копеса 10; колесо 13 - на валу 2. На ступицах центральных конических колес 3, 4 и на валу 2 смонтированы соответственно тормозные звенья 14, 15 и 16, колеса 9, 10 и 11 могут быть заменены колесами других параметров, например, могут быть некруглыми зубчатыми колесами.
Механизм работает следующим образом.
Режим. Включено тормозное звено 14, центральное коническое колесо 3 застопорено, тормозные звенья 15 и 16 выклю чены. Вращение в этом режиме может подаваться:
а)на центральное коническое колесо 4;
б)на коническое колесо 13;
в)на водило 5, При подаче вращения на колесо 4, вращение с колеса 4 через сателлит 8, колеса
11,10 и 9 с определенной редукцией передается на сателлит 7, который, обкатываясь по неподвижному центральному коническому колесу 3, сообщает водилу 5 (валу 1) вращательное движение определенной величины, определяемое по закону работы планетарньсх механизмов ( планетарное )
Одновременно с колеса 10 вращательное движение сообщается коническому колесу
12,который, участвуя в двух вращательных движениях (вокруг своей оси и вокруг оси вала 1), будет передавать коническому колесу 13 (валу 2) алгебраическую сумму двух вращений (вращение водила 5 и колеса 10).
При подаче вращения на коническое колесо 13 вращение с колеса 13 через коническое колесо 12, колесо 10 и 9 будет переда ваться на сателлит 7, который, обкатываясь по неподвижному центральному коническому колесу 3, будет сообщать вращение водилу 5 (валу 1) по закону работы планетарных механизмов (планетарное вращение т.е.
результат работы планетарных механизмов).
Одновременно с колеса 10 вращение будет передаваться через колесо 11 на сателлит 8, который, участвуя в двух вращениях (вокруг своей оси и вокруг оси вала 1), будет передавать центральному коническому колесу 4 алгебраическую сумму (дифференциальное вращение) двух вращений: вращение водила 5 и конического колеса 13.
При подаче вращения на водило 5 (через вал 1), сателлит 7, обкатываясь по неподвижному центральному коническому колесу 3, будет сообщать вращение через колеса 9 и 10 на коническое колесо 12 и через колеса 9, 10 и 11 на сателлит 8. Сателлит 8 и
коническое колесо 12, участвуя в двух вращниях (вокруг своей оси и вокруг оси вала 1), будут сообщать коническому колесу 13 и центральному коническому колесу 4 алгебраическую сумму двух вращений (дифференциальные вращения); колесу 13 - вращение водила 5 и колеса 10; колесу 4 - вращение водила 5 и колеса 11.
Р е ж и м 2. Включено тормозное звено 15, центральное коническое колесо 4 заторможено, тормозные звенья 14 и 16 выключены. Вращение в этом режиме может подаваться;
а)на центральное коническое колесо 3;
б)на водило 5;
в)на коническое колесо 13. Вращение в этом режиме снимается со
звеньев в случае а - с вала 1 (планетарное) и вала 2 (дифференциальное); в случае б - с центрального конического колеса 3 (планетарное) и вала 2 (дифференциальное); в случае в - с центрального конического колеса 3 (планетарное) и вала 1 (дифференциальное),
Р е ж и м 3. Включено тормозное звено 16, коническое колесо 13 застопорено, тормозные звенья 14 и 15 выключены, вращение в этом режиме может подаваться:
а)на центральное коническое колесо 3;
б)на центральное коническое колесо 4;
в)на водило 5.
Вращение в этом режиме снимается со звеньев в случае а - с вала 1 (планетарное) и центрального конического колеса
4(дифференциальное); в случае б - с вала 1 (планетарное) и центрального конического колеса 3 (дифференциальное);
в случае в - с центрального конического колеса 3 (дифференциальное) и центрального конического колеса 4 (дифференциальное).
Р е ж и м 4. Тормозные звенья 16, 14 и 15 выключены, в этом режиме подаются два вращения: на водило 5 (через вал 1) и на коническое колесо 13 (через вал 2). В этом случае коническое колесо 13, взаимодействуя с вращающимися вместе с водилом
5вокруг оси вала 1 коническим колесом 12, передает вращение сателлитам 7 и 8 через колеса 10, 9 и 10, 11. Сателлиты 7
и 8, участвуя в двух вращениях (вокруг своей оси и вокруг оси вала 1), сообщают соответственно центральным коническим колесам 3 и 4 алгебраические суммы вращений (дифференциальные вращения): колесу 4 - вращение водила 5 и колеса 11; Ktwieсу 3 - вращение водила 5 и колеса 9.
Заменив колеса 9, 10 и 11 некруглыми зубчатыми колесами, можно получить в четырех режимах работы механизма такое же количество (в данном случае 10) различных вращательных движений со сложным за коном скорости (законом, воспроизводимым некруглыми зубчатыми колесами). Введение в планетарный механизм кинематической цепи, замыкающей сателлиты, в полненной в виде установленной на водила зубчатой передачи, содержащей колеса 9,10, 11,12, приводимой во вращение колесом 13, закрепленным на валу 2 позволило: а) получить несколько (в данном случае 10) различных скоростей вращений на двух выходах предложенного механизма, причем в одном случае - при подаче одного врашательного движения на вход механизма, вращение на одном из выходов представляет собой результат работы планетарного механизма, а на другом - дифференциального; во втором случае на обоих выходах вращения представляют результат работы дифференциальных механизмов; б) подавать на входы предложенного механизма два вращательных движения и сниФиг.1 мать с обоих выходов вращения, представляющие результат работы дифференциальных механизмов; в) при замене колес кинематической цепи, замыкающей сателлиты, некруглыми зубчатыми колесами получить несколько (1О) различных вращений со сложным законом скорости. Формула изобретения Планетарный механизм по авт.св. № 524030, отличающийся тем, что, с целью получения четырех режимов работы механизма, центральные конические колеса установлены на раздельных соосных валах, на одном из которых жестко закреплено водило, кинематическая цепь, замыкающая сателлиты, вьшолнена в виде установленной на водиле зубчатой передачи, содержащей цилиндрические и конические колеса и приводимой во вращение валом, соосным валу водила.
, ,tL
г/
/
б
/5
-Ьшоншп. у X
/
{
О
фиг. 2
