ние и установленный соосно с ним поворотный корпус 2, выходное звено 3 и приводы вращения поворотного корпуса 2 и вращения и качания выходного звена 3, включающие три электродвигателя 4,,5 и 6 и трехпоточный :дифференциальный механизм с планетарным механизмом развязки движений, включающим соосно установленные на соответствующих коаксиальных валах 7 и 8 и валу общего водила 13 трехпоточ ного дифференциального механизма три центральных цилиндрических колеса 26, 27 и 28, сателхшты 29,30 и 31 которого взаимодействуют с общим зубчатым колесом 32 с внутренним зацеплением и кинематически связаны с соответствующими валами электродвигателей 4,
Изобретение относится к машиностроению и может быть использовано при создании и разработке новых конструкций манипуляторов.
Цель изобретения - уменьшение взаимовлияния перемещений звеньев модуля, а именно поворотного корпуса и выходного звена.
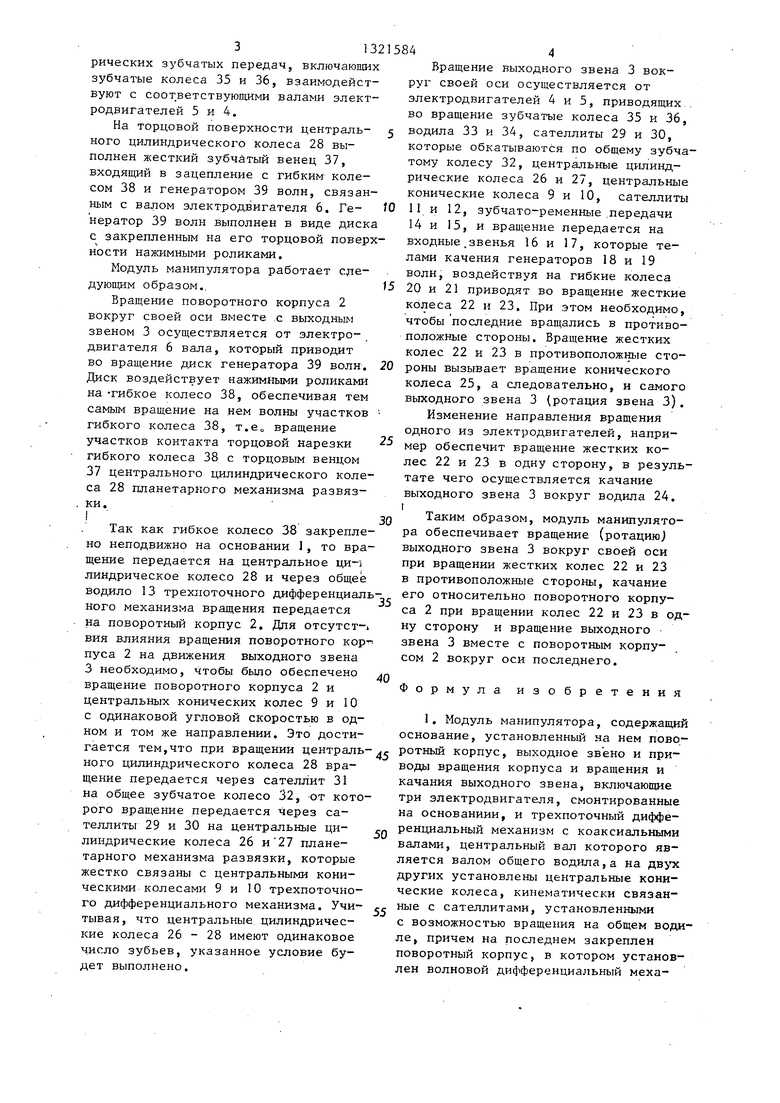
На чертеже изображен модуль манипулятора, общий вид, разрез.
Модуль манипулятора содержит основание J с установленным соосно с ним поворотнььм корпусом 2, выходное звено 3 и приводы вращения поворотного корпуса 2 и вращения и качания выходного звена 3.
Приводы вращения поворотного корпуса 2 и вращения и качания выходного звена 3 включают три электродвигателя 4-6, смонтированные на основании, и трехпоточный дифференциальный механизм с планетарным механизмом развязки движения. На коаксиальных валах 7 и 8, установленных соосно основанию 1, смонтированы центральные конические колеса 9 и 10. взаимодействующие с соответствующими им сателлитами 11 и 12, установлен- ными на общем- водиле 13 трехпоточного дифференциального механизма, смонтированном в поворотном корпусе 2 перпендикулярно коаксиальньп валам
5 и 6„ Вращение поворотного корпуса 2 обеспечивается от электродвигателя 6 и далее передается через волновую передачу- на центральное цилиндрическое колесо 28, жестко связанное с об щим водилом трехпоточного дифференциального механизма Взаимодействие через сателлит 31 центрального цилиндрического колеса 28 с общим зубчатым колесом 32 обеспечивает отсутствие влияния вращения поворотного корпуса 2 на движения выходного звена 3. Вращение и качание выходного звена 3 осуществляется от электродвигателей 4 и 5, В зависимости от направления их вращения обеспечивается вращение или качание выходного звена. 2 з,п, ф-лы, 1 ил.
7 и 8. Сателлиты 11 и 12 посредством зубчато-ременных передач 14 и 15 связаны с входными звеньями 16 и 17 вол- . нового дифференциального механизма,
несущими генераторы 18 и , взаимодействующие с гибкими колесами 20 и 21 и жесткими колесами 22 и 23 одновременно оПричем гибкие колеса 20 и 21 жестко связаны с водилом 24 волнового дифференциального механизма, смонти- рованным- в поворотном корпусе 2 параллельно общему водилу 13 трехпоточного дифференциального механизма, а жесткие колеса 22 и 23 установлены с:
противоположных сторон от конического зубчатого колеса 25, закрепленного на выходном звене 3, и взаимодействующие с ним.
На коаксиальных валах 7 и 8 на противоположных концах от центральных конических колес 9 и 10 установлены центральные цилиндрические колеса 26 и 27 планетарного механизма развязки движений,- а на валу общего водила 13, установленного внутри коакси альных валов 7 и 8. закреплено центральное цилиндрическое колесо 28, Каждое из центральных цилиндрических
колес 26 - 28 через сателлиты 29-31 взаимодействует с общим зубчатым колесом 32, при этом сателлиты 29 и 30 посредством водил 33 и 34 и цилиндрических зубчатых передач, включающих зубчатые колеса 35 и 36, взаимодействуют с соот ветствуюшими валами электродвигателей 5 и 4.
На торцовой поверхности центрального цилиндрического колеса 28 выполнен жесткий зубчатый венец 37, входящий в зацепление с гибким колесом 38 и генератором 39 волн, связанным с валом электродвигателя 6, Генератор 39 волн выполнен в виде диска с закрепленным на его торцовой поверх ности нажимными роликами.
Модуль манипулятора работает сде- дующим образом.,
Вращение поворотного корпуса 2 вокруг своей оси вместе .с выходным звеном 3 осуществляется от электродвигателя 6 вала, который приводит во вращение диск генератора 39 волн. Диск воздействует нажимными роликами на -гибкое колесо 38, обеспечивая тем самым вращение на нем волны участков гибкого колеса 38, т.е вращение участков контакта торцовой нарезки гибкого колеса 38 с торцовым венцом 37 центрального цилиндрического колеса 28 планетарного механизма развязки. I
Так как гибкое колесо 38 закреплено неподвижно на основании 1, то вращение передается на центральное ци- линдрическое колесо 28 и через общее водило 13 трехиоточного дифференциаль ного механизма вращения передается на поворотный корпус 2. Для отсутст-л ВИЯ влияния вращения поворотного корпуса 2 на движения выходного звена 3 необходимо, чтобы бьшо обеспечено вращение поворотного корпуса 2 и центральных конических колес 9 и 10 с одинаковой угловой скоростью в одном и том же направлении. Это достигается тем,что при вращении центрального цилиндрического колеса 28 вращение передается через сателлит 31 на общее зубчатое колесо 32, от которого вращение передается через сателлиты 29 и 30 на центральные цилиндрические колеса 26 и 27 планетарного механизма развязки, которые жестко связаны с центральными коническими колесами 9 и 10 трехпоточно- го дифференциального механизма. Учитывая, что центральные цилиндрические колеса 26 - 28 имеют одинаковое число зубьев, указанное условие будет выполнено.
0
5
0
5
0
5
0
5
0
5
Вращение выходного звена 3 вокруг своей оси осуществляется от электродвигателей 4 и 5, приводящих . во вращение зубчатые колеса 35 и 36, водила 33 и 34, сателлиты 29 и 30, которые обкатываются по общему зубчатому колесу 32, центральные цилиндрические колеса 26 и 27, центральные конические колеса 9 и 10, сателлиты 11 и 12, зубчато-ременные .передачи 14 и 15, и вращение передается на входные.звенья 16 и 17, которые телами качения генераторов 18 и 19 волн, воздействуя на гибкие колеса 20 и 21 приводят во вращение жесткие колеса 22 и 23. При этом необходимо, чтобы последние вращались в противоположные стороны. Вращение жестких колес 22 и 23 в противоположные стороны вызывает вращение конического колеса 25, а следовательно, и самого выходного звена 3 (ротация звена 3).
Изменение направления вращения одного из электродвигателей, например обеспечит вращение жестких колес 22 и 23 в одну сторону, в результате чего осуществляется качание выходного звена 3 вокруг водила 24. t
Таким образом, модуль манипулятора обеспечивает вращение (ротацию) выходного звена 3 вокруг своей оси при вращении жестких колес 22 и 23 в противоположные стороны, качание его относительно поворотного корпуса 2 при вращении колес 22 и 23 в одну сторону и вращение выходного звена 3 вместе с поворотным корпусом 2 вокруг оси последнего.
Формула изобретения
1. Модуль манипулятора, содержащий основание, установленньш на нем поворотный корпус, выходное звено и приводы вращения корпуса и вращения и качания выходного звена, включающие три электродвигателя, смонтированные на основаниии, и трехпоточный дифференциальный механизм с коаксиальными валами, центральный вал которого является валом общего водила, а на других установлены центральные конические колеса, кинематически связанные с сателлитами, установленными с возможностью вращения на общем води- ле, причем на последнем закреплен поворотный корпус, в котором установлен волновой дифференциальный меха513
низм, при этом его входные звенья кинематически связаны с соответствующими сателлитами трехпоточного дифференциального механизма, а жесткие колеса установлены на водила волнового дифференциального механизма с возможностью вращения относительно него и входят в зацепление с комическим зубчатым колесом, смонтированным ifa выходном звене, отличающийся тем, что, с целью уменьшения взаимовлияния перемещений гвеньев, он снабжен планетарным механизмом развязки движений, вьтолнен- иым в виде трех центральных цилиндрических колес, установленных на соответствующих коаксиальных валах и валу общего водила, и сателлитов, установленных с возможностью взаимодействия с общим зубчатым колесом, расположенным с возможностью вращения на основании, причем водила са46
теллитов кинематически связаны с соответствующими валами электродвигателей
2. Модуль поп.1,отличающ и и с я тем, что центральное 1Щ- линдрическое колесо планетарного механизма связано с выходным валом электродвигателя привода вращения корпуса по средством волновой передачи, жесткий зубчатый венец, которой вьшолнен на торце центрального цилиндрического колеса, а генератор волн установлен на выходном валу электродвигателя.
3 V Модуль поп,1, отличающийся тем, что кинематическая связь водил планетарного механизма развязки движений с соответствующими валами электродвигателей вьтолнена в виде зубчатых цилиндрических передач.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1985 |
|
SU1268411A1 |
| Модуль манипулятора | 1986 |
|
SU1360979A1 |
| Шарнир манипулятора | 1983 |
|
SU1140946A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО (ЕГО ВАРИАНТЫ) | 1991 |
|
RU2134003C1 |
| Модуль манипулятора | 1986 |
|
SU1433790A1 |
| Рука манипулятора | 1985 |
|
SU1252167A1 |
| МНОГОДИАПАЗОННАЯ ТРЕХПОТОЧНАЯ БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ НА ОСНОВЕ ПЯТИЗВЕННОГО ДИФФЕРЕНЦИАЛЬНОГО МЕХАНИЗМА | 2014 |
|
RU2554922C1 |
| Рука манипулятора | 1985 |
|
SU1256961A1 |
| МНОГОДИАПАЗОННАЯ ТРЕХПОТОЧНАЯ БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ НА ОСНОВЕ ДВУХ ДИФФЕРЕНЦИАЛЬНЫХ МЕХАНИЗМОВ | 2013 |
|
RU2555583C2 |
| ПЛАНЕТАРНАЯ СОГЛАСУЮЩАЯ КОРОБКА ПЕРЕДАЧ (ВАРИАНТЫ) | 2014 |
|
RU2570187C2 |
Изобретение относится к области машиностроения и может быть использовано при создании конструкций манипуляторов. Целью изобретения является уменьшение взаимовлияния перемещений звеньев манипулятора, а именно поворотного корпуса и выходного звена, Модуль манипулятора содержит основа20 21 (/)

| Модуль манипулятора | 1985 |
|
SU1268411A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
