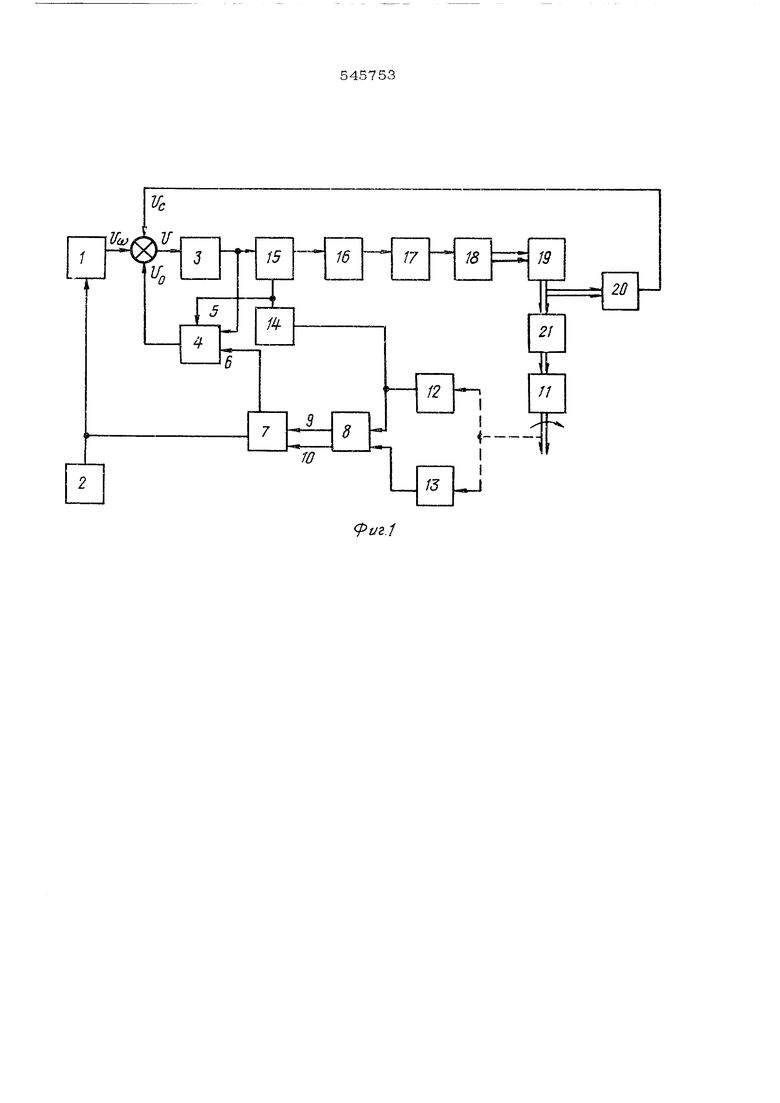
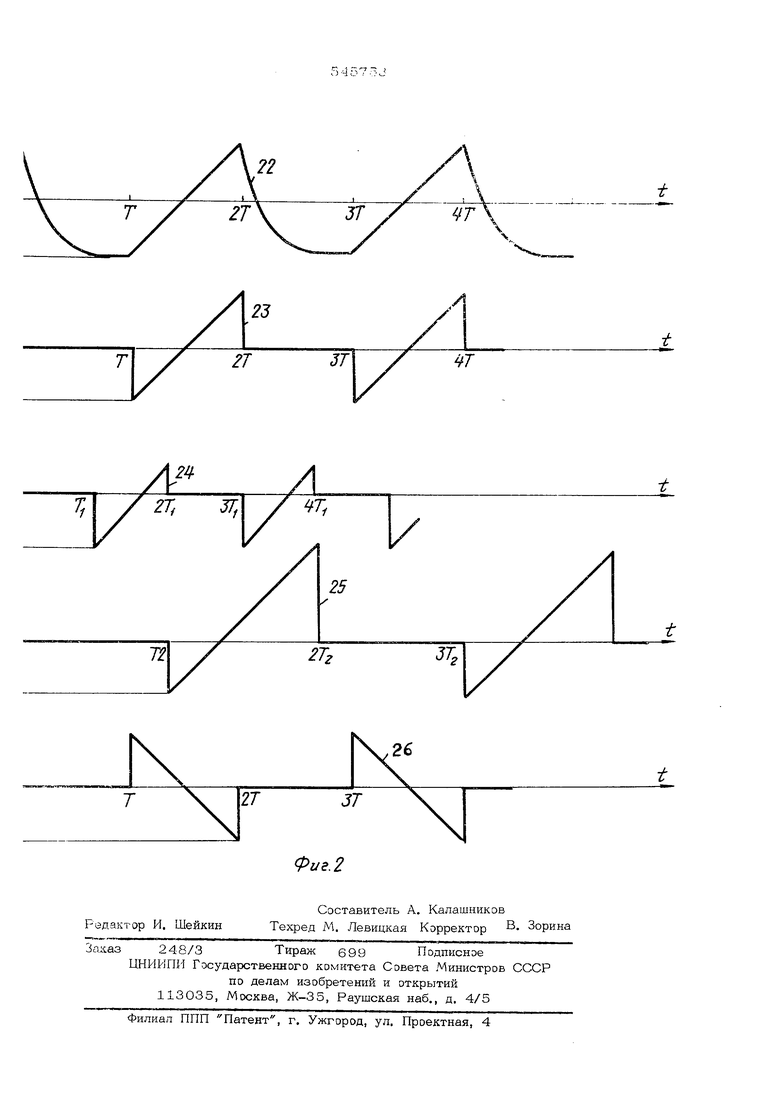
(54) СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ BPAillEKnJl РОТОРА ТУРБИНЫ тотного датчика связан формирователь пери дов, выход которого соединен с управляющими входами блока начального значения и клю чевого эпемейта. На фиг. 1 представлена схема описывеемой системы; на фиг, 2 - диаграммы, поясняющие принцип действия системы и изменение сигналов на выходе ее элементов в фунК ции времени . Система автоматического регулирования угловой скорости вращения ротора турбины содержит задатчик 1 с источником питания 2, интегратор 3, блок 4 начального значения, вход 5- которого подключен к выходу интегратора, а вход 6 - к переключателю знака 7, выявитель 8 направления вращения с логическими выходами 9 (передний ход ) и 10 (задний ход), турбину 11, ротор которой связан с частотными датчиками 12 13, формирователь 14 периодов частотного датчика, ключевой элемент 15, фильтр 16, усилитель рассогласования 17, электрогидра лический преобразователь 18, сервомотор 19 с датчиком положения 20 и клапан 21, управляющий подачей пара в турбину 11. Работа системы в установившемся режиме (фиг, 2), в нечетные периоды сигнала частотного датчика 12 формирователь 14 воздействует на блок 4 начального значения так, что он переводит интегратор 3 в режим записи напряжения начальных условий, и на его выходе устанавливается напряжение - U g (кривая 22), Знак напряжения начальных условий зависит от направления вращения турбины 11, которое определяется логической схемой, входящей в состав выявителя 8 направления вращения. Выявление направления вращения осуществляется путем анализа фазовых сдвигов сигналов, формируемых частотными датчиками 12 и 13, В зависимости от того, в каком направлении вращается тур бина, напряжение одного или другого частот ного датчика является опережающим, и на выходах 9 или 10 выявителя направления вращения возникает единичный логический г нал, управляющий переключателем знака 7 напряжения начальных условий, В периоды записи начальных условий формирователь 14 размыкает ключевой элемент 15, и сигнал интегратора 3 не проходит на вход фильтра 16, В четные периоды (Т-2Т), (ЗТ-4Т) и т.д, сигнала частотного датчика интегратор 3 работает в режиме интегрирования снгнала и, К напряжение на его выходе изменяется по закону: UH -Uo-bU-fп - постоянная интегрирования интегратора 3, fc - текущее время, Uuj - сигнал заданной угловой CKOptx ти, УС - сигнал положения сервомотора, причем обычно и «Uu),)-Ug. Принципиально обратная связь по положению сервомотора может отсутствовать (при Ug О имеем астатический регулятор), Для простоты будем рассматривать этот случай, В четные периоды формирователь 14 уствтнавливает ключевой элемент 15 в замкнутое состояние, и на вход фильтра 1б поступает выходное напряжение интегратора 3. Среднее значение напряжения, действующего на входе фильтра, определяется вьфажением: Ucp -|TjuHcLt -ub UceJi. Если частота сигнала датчика f 1 /Т удовлетворяет равенству 1/21 (J/Uo то ,как видно из фиг, 2, напряжение (р , а следовательно, и постоянная составляющая напряжения, выделяемого на выходе фильтра равны нулю (кривая 23),, Таким образом, каждому значению сигнала U о) соответствует определенная частота f , при которой сигнал рассогласования на входе усилителя 17 отсутствует. При этом- перепад давления на выходе электрогидравлического преобразователя 18 равен нулю, и сервом1 тор 19 находится в неподвижном состоянии. В результате обеспечивается постоянный расход пара, поступающего на турбину 11, котором достигается заданная скорость вращения. Поскольку частота f прямо пропорциональна скорости вращения, между напряжением задания Uuu и установнвши ся значением скорости вращения существует линейная зависимость. Благодаря наличию связи переключателя знака 7 с источником питания 2 задатчика 1 нестабильность источника питания не приводит к погрешности регулирования, так как изменения напряжений заданиа Ц и начальных условий U происходят в одну и ту же сторону и взаимно компенсируются, ц отклонении скорости вращения (чаототы -f ) от заданного значения изменяется период Т, и среднее значенне наоряження на входе фильтра 16 отличается от нуля. На фиг. 2 кривыми 24 и 25 показаны временные дна граммы для положвтеяьного ( Т Т ) и отрицательного ( Т Т ) приращений скорости вращения.Как видно из этих диаграм в зависимости от знака прирашения скорости изменяется полярность постоянной состав ляющей сигнала на входе фильтра 16. В результате на выходе усилителя рассогласования 17 возникает напряжение того или иного знака, под действием которого электрогидравлический преобразователь 18 управляет перемещением сервомотора 19. Направление перемещения сервомотора определяется знаком приращения скорости, благодаря чему достигается надлежащее изменение расхода пара, поступающего в турбину. В конечном счете сервомотор 19 устанавливается в такое положение, при котором расход пара обе печивает заданную скорость вращения, и система приходит в установившееся состояние характеризуемое кривыми 22 и 23 (фиг.2) Аналогичным образом работает система и при другом знаке сигнала задания ULO , когда направление вращения турбины изменяется на противоположное. В этом случае как отмечалось вьше, напряжение начальных условий изменяет полярность, и временные диаграммы напряжения на входе фильтра в установившемся режиме имеют вид, показанный на фиг. 2 кривой 26. Таким образом, при несоответствии скорости вращения ротора турбины сигналу задания Uiv на входе усилителя формируется напряжение рассогласования постоянного тока, полярность которого зависит от знака сигнала задания, направления вращения турбины и знака отклонения скорости от установившегося значения. Напряжение рассогласования изменяется в зависимости от величины отклонения скорости, причем, как ив любой системе автоматического регулирования, работающей по приншшу отклонения, под действием сигнала рассогласования происходит изменение управляющего воздействия (подача пара на турбину), исистема при ходит к установившемуся режиму, при котором отклонение равно нулю. Подобным же образом работает система и при наличии обратной связи по положению сервомотора ( U О ). Следовательно, данная система не требует предварительного преобразования частотного сигнала в сигнал по напряженшо до суммирования с сигналом задатчика, что упрощает конструкцию системы и улучшает ее динамические характеристики. Формула изобретения Система регулирования скорости вращения ротора турбины, содержащая задатчик с выходным сигналом по напряжению, снабженный источником питания, и два частотных датчика скорости вращения, подключенные через фильтр, усилитель и электрогидравлический преобразователь к сервомотору с датчиком положения, выявитель направления вращения с логическими выходами и переключатель знака, отличающаяся тем, что, с целью упрощения конструкции и улучшения динамических характеристик, между задатчик ом и фильтром включены ключевой элемент и интегратор, выход которого подключен также к первому входу блока начального значения, ко второму входу которого через переключатель знака, соединенный с логическими выходами выявителя направления вращения, подключен источник питания задатчика, а с выходом частотного датчика связан формирователь периодов, выход которого соединен с управляющими входами блока начального значения и ключевого элемента. Источники информации, принятые во внимание при экспертизе: 1.Г. 3. Богорад Цифровые регуляторы и измерители скорости , Энергия, М-Л., 1966, с. 9-17. 2.Авторское свидетельство СССР № 421735, М.Кл. F 01 D 17/20, 1972,
Риг.1
±
23
ЗТ
2Т
Т
Л
ЧТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления скоростью вращения ротора турбины | 1980 |
|
SU866247A2 |
| Система регулирования частоты вращения турбины | 1976 |
|
SU691582A1 |
| Система управления мощностью турбины | 1984 |
|
SU1227823A1 |
| Система регулирования турбины | 1985 |
|
SU1295012A1 |
| Система регулирования частоты вращения судовой турбины | 1981 |
|
SU964198A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ РЕАКТИВНЫХ ГИДРАВЛИЧЕСКИХ ТУРБИН | 2017 |
|
RU2636603C1 |
| Способ управления сервомотором рабочего колеса поворотно-лопастной турбины | 2014 |
|
RU2614232C2 |
| Система регулирования турбины | 1980 |
|
SU918452A1 |
| Система регулирования турбоагрегата | 1984 |
|
SU1160064A1 |
Л
Л
2
2Т, Ц
Tt
2Т
t
t
ЗТ,
