(54) СИСТЕМА РЕГУЛИРОВАНИЯ ТУРБИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления скоростью вращения ротора турбины | 1980 |
|
SU866247A2 |
| СПОСОБ УПРАВЛЕНИЯ РЕГУЛИРУЮЩИМИ ОРГАНАМИ ГИДРОТУРБИН (ВАРИАНТЫ) | 2018 |
|
RU2710944C1 |
| Система дистанционного автоматизированного управления режимами работы комплекса "главный" судовой турбоагрегат-винт регулируемого шага- навешенный генератор | 1977 |
|
SU779179A1 |
| Электрогидравлическая система регулирования судовой турбины | 1974 |
|
SU464705A1 |
| Устройство дистанционного автоматизированного управления транспортной паровой турбиной | 1974 |
|
SU528229A1 |
| Система регулирования частоты вращения турбины | 1976 |
|
SU691582A1 |
| Система регулирования скорости вращения ротора турбины | 1974 |
|
SU545753A1 |
| Электрогидравлическая система регулирования судовой паровой турбины | 1974 |
|
SU564432A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ПАРОВОЙ ТУРБИНЫ | 1992 |
|
RU2031211C1 |
I
Изобретение относится к теплоэнергетике и может быть использовано в электрогидравлических системах регулирования частоты вращения .турбин, в том числе судовых.
Наиболее близкой к предлагаемой по технической сущности и достигае-х мому результату является система регулирования турбины, содержащая электрогидравлический блок, связанней с сервомотором маневрового золотника, датчики частоты вращения ротора и положения маневрового золотника и задатчик частоты вращения, подключенные к усилителям рассогласования ка- ,j нала управления, выходы которых подключены к входу электрогидравлического блока, переключатель питания каналов и цепи сигнализации неисправности. Усилитель рассогласования выде- jo ляет и усиливает сигнал, определяемый разностью напряжений задатчика и датчиков регулируемой частоты враще-ния и обратной связи по положению.
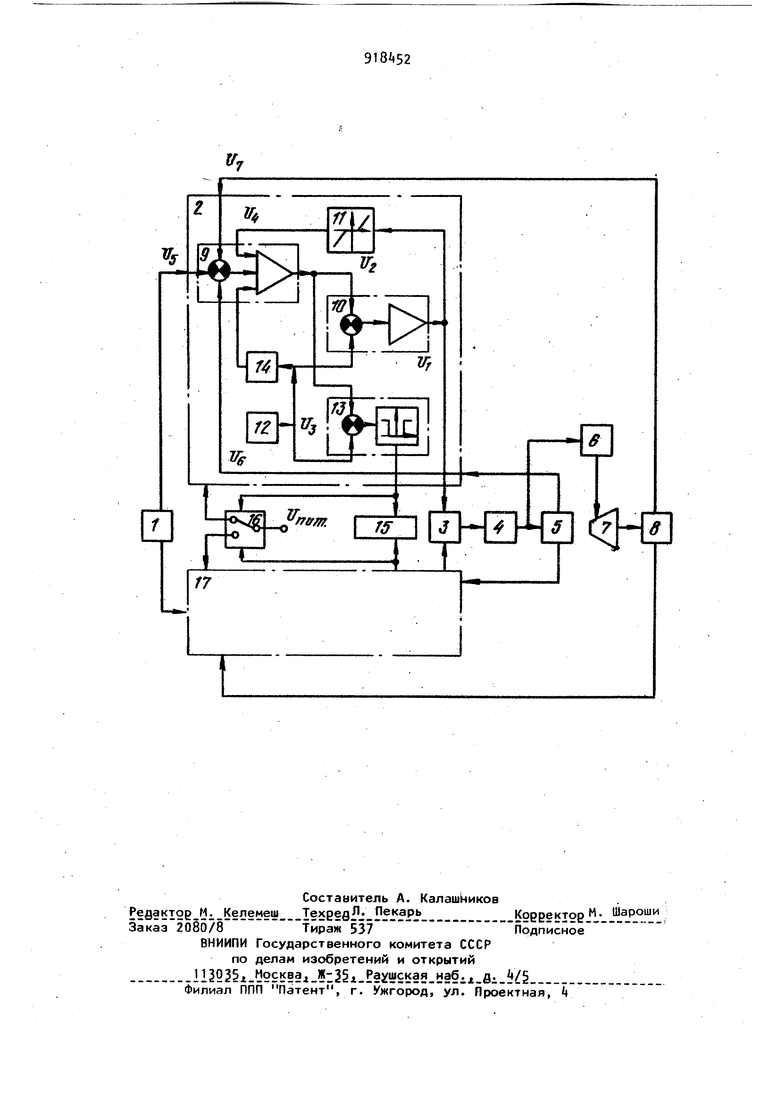
1Эт6т усилитель управляет электрогидравлическим блоком, обеспечивающим перемещение исполнительного сервомотора в направлении устранения сигнала рассогласования 11.
Недостатком известной системы следует считать несколько пониженную надежность и недостаточно высокое качество динамических характеристик. Для контроля работоспособности усилителя необходимо вводить контроль, выявляющий отказы по наличию остаточного рассогласования в системе. Однако такой.контроль требует значитель ных временных задержек, необходимых для устранения ложных срабатываний устройств контроля в переходных процессах, когда на входе эле ктрогидравлического блока действует полезный управляющий сигнал. Длительность временной задержки в цепи контроля должна быть больше максимального времени ;переходного процесса в системе. Поiэтому в ряде случаев за время обна39lружения неисправности маневровый золотник успевает переместиться в одно из крайних положений, что может при1 вести к недопустимому разгону турбины и даже ее реверсу. Это снижает надежность системы автоматического регу лирования и повышает опасность возникновения аварийных ситуаций при эксплуатации судна. Другим существенным недостатком известных систем регулирования является ухудшение их динамических характеристик, связанное с тем, что при больших рассогласованиях (например во. время маневров) усилитель рассогласования оказывается в режиме глубокого насыщения. Это приводит к возникновению значительного нелинейного запаздывания за счет накопления энергии в реактивных элементах самого уси лителя и входящих в него звеньев динамической коррекции. При высоком быстродействии рассматриваемых систем регулирования такое запаздывание приводит к существенному ухудшению качества переходных процессов (увеличению перерегулирования и числа колебаний вокруг установившегося положения) . Цель изобретения - повышение надежности и улучшение динамических характеристик системы. Для достижения поставленной цели в каждый канал управления введены усилитель управляющего сигнала, задатчик опорного сигнала, элемент нечувствительности, корректируещее звено с коэффициентом усиления, обратным коэффициенту усиления усилителя рассогласования, и пороговый элемент, и каждый усилитель управляющего сигнала включен между выходом усилителя рассогласования и входом электрогидравлического блока, элемент нечувстт; витальности - между выходом усилителя управляющего сигнала и входом уси лителя рассогласования, задатчик опо ного сигнала подключен к входам усилителя управляющего сигнала и порого вого элемента непосредственно, а к входу усилителя рассогласования - че рез корректирующее звено, вход порогового элемента связан также с выходом усилителя рассогласования, а выход его - с переключателем питания и цепями сигнализации неисправности. На чертеже приведена схема предла гаемой системы с двумя равноценными каналами управления, один из которых находится в резерве. В состав системы регулирования турбины входят задатчик 1 частоты вращения, основной канал управления 2, электрогидравлический блок 3 сервомотор маневрового золотник с датчиком 5 положения маневрового золотника, гидравлический усилитель 6 и турбина 7 с датчиком частоты вращения 8. Основной канал управления 2 содержит усилитель 9 рассогласования, осуществляющий сравнение сигналов задатчика 1, датчика частоты вращения 8 и датчика 5 положения маневрового золотника. Наряду с выявлением и усилением сигнала рассогласования усилитель 9 обеспечивает также устойчипл вость и требуемое качество переходных процессов в системе как в режиме автоматического регулирования, так и в следящем режиме (при отключенном датчике частоты вращения 8 и единичной обратной связи по положению маневрового золотника). С этой целью усилитель 9 имеет соответствующие корректирующие цепи. В канал управления 2, кроме указанных звеньев, введены усилитель 10 управляющего сигнала, элемент 11 нечувствительности, задатчик 12 опорного си гнала, пороговый элемент 13 и корректирующее звено с коэффициентом усиления рбратным коэффициенту усиления усилителя 9 рассогласования. Входы усилителя 10 управляющего сигнала и порогового элемента 13 подключены к выходу усилителя 9 рассогласования и задатчику 12 опорного сигнала. усилителя 10 подключен к электрогидравлическому блоку 3 и через элегг мент 11 нечувствительности - к дополнительному входу усилителя 9 рассогласования. К другому дополнительному входу усилителя 9 рассогласования подключено корректирующее звено Tt. Выходы усилителя 9 рассогласования и задатчика 12 опорного сигнала подключены одновременно к пороговому элементу 13, выход которого соединен с цепями 15 сигнализации неисправности и переключателем 16 питанияканалов. Включение в работу резервного канала управления 17, имеющего структуру, аналогичную каналу управления 2, осуществляется с помощью переключателя 16, который переключает питание j на резервный канал по сигналу на выходе порогового элемента 13 основного канала 2. При этом задатчик 1, датчик 5 положения маневрового золотника и датчик частоты вращения 8 подключены к входам усилителя рассогласования резервного канала 17 так же, как и в основном канале 2, а вы-ход резервного канала 17 соединен с сервомотором k через электрогидравлический блок 3Работа системы рассматривается вна чале при исправном основном ка;нале 2. В установившемся режиме, когда час тота вращения соответствует заданной, сервомотор Ц неподвижен. Поэтому, пре небрегая зоной нечувствительности электрогидравлического блока 3 и сервомотора -k, можно считать, что напряжение Uy, на выходе усилителя 10 управляющего сигнала равно нулю. Сле довательно, разность напряжения OJ.H Ui, на выходах усилителя 9 рассогласования и задатчика 12 опорного сигнала, также равна нулю, т.е. U (j Uj. При напряжение U на выходе элемента 11 нечувствительности также равно нулю и выходное напряжение Цл усилителя 9 рассогласования при от сутствии корректирующего звена И определяется равенством Ua к. Ue,- и), где Ug-, и, U-J - напряжение на. выходах задатчика 1, датчика 5 положения маневрового золотника и датчика частоты вращения 8 соответственно; . К/( - коэффициент усиления усилите ля 9 рассогласования. Таким образом, в установившемся режиме при Ug const сигналы обратной связи по частоте вращения U и по положению маневрового золотника Uj, автоматически подбираются в систе ме так, чтобы обеспечивалась компенсация сигнала задатчика опорного напряжения на входе усилителя 10,. т.е Uj K.cuj- U(, - и,) -из. За счет этого пороговый элемент 13 находится в выключенном состоянии и напряжение на его выходе отсутствует При этом напряжения на входах усилит ля 9 рассогласования удовлетворяют следующему равенству + - 0. Отсюда видно, что наряду сОстатической погрешностью, обусловленной неравномерностью в данной системе возникает дополнительная погрешность, вызванная действием Сигнала задатмика 12 на входе усилителя 10.Погрешность, вносимая задатчиком 12 опорного сигнала, компенсируется в рассматриваемой системе с помощью звена 14,подключающего напряжение U к входу усилителя 9 рассогласования. Действительно, с учетом введенной связи задатчика 12 с усилителем 9 выходное напряжение усилителя 9 определяется соотношениеми K,(Uj- Uj, - и - и соответственно у U5- Ufc- UT- KiUi+ 0. Если звено имеет коэффициент передачи Kij обратный коэффициенту усиления усилителя 9 рассогласования (Krj. -), то Uj- Ufc- UT 0. Поэтому в данной системе, как и в иЗвегстных системах аналогичного назначения, частота вращения турбины и; в установившемся режиме определяется напряжением Uj задатчика и неравномерностью регулятора (сигналом обратной связи по положению маневрового золот ника U, ) В переходном процессе, когда сигнал задания U не уравновешивается сигналами обратных связей по частоте вращения U-j и положению сервомотора маневрового золотника и,, на выходе усилителя 10 появляется управляющий сигнал и/1 , под действием которого электрогидравлический блок создает перепад давления на сермоторе маневрового золотника, вызывая его перемещение в направлении устранения рассогласования на входах усилителя 9В процессе отработки рассогласования напряжение и превышает зону нечувствительности элемента 11 и на его выходе возникает сигнал обратной связи, охватывающий усилитель 9 рассогласования и введенный в систему усилитель 10. При достаточно большом коэффициенте усиления усилителя 10 напряжение, возникающее на выходе этого усилителя, обеспечивается при весьма малой разности сигналов Uf и и, действующих на его входах. Поэтому можно считать, что независимо от величины рассогласования в системе выходное напряжение усилителя 9 практически равно напряжению загдатчика 12 опорного сигнала. Действительно, разность и равная -п- может быть сделана сколь угодно малой за счет увеличения коэ(1 фициента усиления К силителя 10. При этом сигнал рас7918согласования ulJ U5 Wfe UT компенсируется напряжением нелинейной обратной связи, формируемым элементом 11 нечувствительности (напряк{ение U автоматически подбирается так, чтобы выполнялось приближенно равенство Uii Щ). ТаКИМобразом, в переходном процессе, как и в установившемся режиме. разность напряжений UQ и Uj близка к нулю, а потому пороговый элемент 13 -остается в выключенном состоянии, и сигнал на его выходе отсутствует. Отсюда следует, что усилитель 9 рассогласования как и усилитель 10, независимо от величины рассогласования в системе, остаются в линейной зоне. Выходное напряжение усилителя 9 UQ % U-i,, а напряжение на выходе усилителя 10 примерно равно половине зоны нечувствительности элемента 11. За счет этого устраняется нелинейное динамическое запаздывание, возникающее в усилителях известных систем регулирования частоты вращения судовых турбин. Такое запаздывание, обусловленное имеющимися в усилителях ре активными элементами, например элементами динамических корректирующих цепей, вызывает значительные трудности в обеспечении устойчивости к получению требуемого качества переход ных процессов в таких быстродействующих системах автоматического регулирования, какими являются системы регулирования частоты вращения судовых турбин. В данной системе эффект нелинейного запаздывания канал управления полностью исключается, в результате чего повышается быстродействие и улучшаются динамические характеристики системы. Далее рассматривается работа систе мы при отказе основного канаа управления 2. Если отказ произошел в усилителе рассогласования, то выходное нэпряжение Ui2 этого усилителя принимает, произвольное значение, которое отличается от напряжения иJ на величину, превышающую напряжение срабатывания порогового элемента 13 При надлежащем выборе напряжения Ua вероятность того что при отказе усилителя 9 его выход ное напряжение будет близко к Ui пре небрежимо мала. Поэтому отказ усилителя 9 рассогласования приводит к срабатыванию порогового элемента 13 на выходе которого появляется сигнал 2 свидетельствующий о неисправности основного канала управления. Этот сигнал используется как для индикации отказа, так и для ввода резервного канала. С этой целью выходной сигнал порогового элемента 13 подается на переключатель 16, который переключает питание с основного канала на резервный. При этом выходной сигнал резервного канала 1/ через электрргидравлический блок 3 воздействует на сервомотор маневрового золотника, обеспечивая обработку рассогласования. Аналогичным образом происходит выявление неисправности канала 2 и при возникновении отказов в других его звеньях, например в усилителе ТО. Действительно, при отказе этого усилителя и появления рассогласования в системе нарушается действие цепи нелинейной обратной связи, охватывающей усилитель 9 рассогласования с выхода элемента 11. Поэтому усилитель 9 переходит в режим насыщения и его выходное напряжение отличается от опорного напряжения Uj на величину, превышающую порог срабатывания элемента 13- Это приводит к возникновению на выходе порогового элемента 13 напряжения, свидетельствующего об отказе основного канала управления, после чего происходит переход на резервный канал подобно тому, как это происходит при отказе усилителя 9 рассогласования. Таким образом, отказы основного канала управления нарушают примерное равенство сигналов на выходах усилителя 9 рассо лассаания и задатчик 12, поскольку разрывается цепь обратной связи через элеме 11 и выходное напряжение усилителя 9, не может автоматически подстраизаться под опорный сигнал. Выявление отказа канала в данной системе происходит практически мгноп венно, так как неисправность любого звена канала нарушает действие eeenv денной обратной связи, в результатечего сразу же пoявляeтdя разностный сигнал (UQ - 1)3) вызывающий срабатывание порогового элемента 13« Это позволяет осуществить автоматический переход на резервный канал за время, в течение которого частота вращения турбины практически не успевает измениться. Таким образом, отказ основного канала не нарушает работу главного, турбозубчатого агрегата и соответственно не изменяет скорость хода судн что существенно повышает надежность работы системы управления и снижает опасность возникновения аварийных си туаций. В этом состоит главное преим щество предлагаемой системы автомати ческого регулирования частоты вращения ротора судовой турбины по сравне нию с известными, в которых кoнtpoль исправности регулятора осуществляется по сигналах рассогласования и тре бует введение временных задержек, снижающих надежность контроля и безо пасность работы турбины. Кроме того, введение нелинейной обратной связи с выхода усилителя управляющего сигнала через элемент нечувствительности на вход усилителя рассогласования предотвращает насыщение усилителей регулятора при боль ших рассогласованиях в системе. За счет этого устраняется эффект н.елиHejiHoro запаздывания, ухудшающий динамические характеристики известных систем. Формула изобретения Система регулирования турбины, содержащая электрогидравлический блок, связанный с сервомотором манев рового золотника, датчики частоты вращения ротора и положения маневро210вого золотника и задатчик частоты вращения, подключенные к усилителям рассогласования канала управления, выходы которых подключены к входу электрогидравлического блока, переключатель питания каналов и цепи сигнализации неисправности, отличающаяся тем, что, с целью повышения надежности и улучшения динамических характеристик системы, в кан{дый канал управления введены усилитель управляющего сигнала, задатчик опорного сигнала, элемент нечувствительности, корректирующее звено с коэффициентом усиления, обратным коэффициенту усиления усилителя рассогласования, и пороговый элемент, и каждый усилитель управляющего сигнала включен между выходом усилителя рассогласования и входом электрогидравлического блока, элемент нечувствительности - между выходом усилителя управляющего сигнала и входом усилителя рассогласования, задатчик опорного сигнала подключен к входам усилителя управляющего сигнале и порогового элемента неп.; посредственно, а к входу усилителя рассогласования - через корректирующее звено, вход порогового элемента связан также с выходом усилителя рассогласования, а выход его - с переключателем питания и цепями сигнализации неисправности. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР ° 553861, кл. F 01D 17/24, 1-975.
