Изобретение относится к области автоматического управления агрегатами гидроэлектростанций (ГЭС) и предназначено для использования в системе ведения режима агрегата ГЭС с реактивной турбиной (радиально-осевой, пропеллерной, поворотно-лопастной и капсульной) в соответствии с задаваемой верхним уровнем управления величиной электрической мощности.
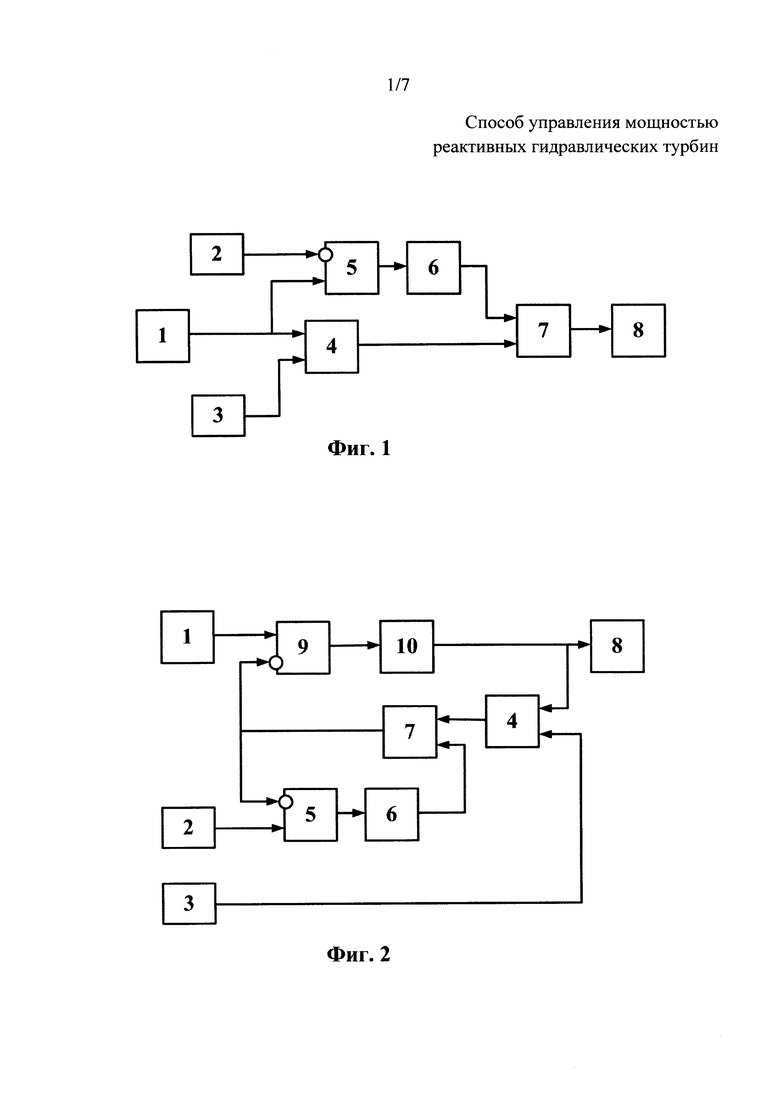
Известный способ управления уровнем генерации активной мощности агрегатами ГЭС реализован, например, в регуляторе [см. Буклет компании VOITH "HyCon™. Digital turbine governor", Heidenheim. - Электронный ресурс. Режим доступа к ресурсу: https://voith.com/de/12_06_Digital_Turbine_Governor.pdf - свободный]. Структурная схема, иллюстрирующая этот способ для случая управления реактивной турбиной с одним регулирующим органом (например, радиально-осевой), представлена на Фиг. 1. На нем обозначены: 1 - источник сигнала задания мощности турбины (задатчик мощности); 2 - преобразователь величины активной мощности в пропорциональный ей сигнал мощности турбины (датчик мощности); 3 - источник сигнала пропорционального напору агрегата (датчик напора); 4 - нелинейный преобразователь (блок) сигнала задания мощности в сигнал задания положения сервомотора регулирующего органа (сервомотора направляющего аппарата, сервомотора НА); 5 - выявитель рассогласования (ошибки) отработки задания мощности турбины (усилитель-ограничитель разности между сигналом задания мощности и ее измеренной величиной); 6 - ПИ-корректор выходного сигнала нелинейного преобразователя 4; электрогидравлическая следящая система; 7 - сумматор сигналов нелинейного преобразователя 4 и ПИ-корректор его выхода; 8 - электрогидравлическая следящая система привода лопаток направляющего аппарата (ЭГСС НА).
На Фиг. 1 блок 4 предназначен для преобразования сигнала задания мощности в соответствии с величиной сигнала напора, действующего на турбину, в сигнал задания положения сервомотора НА. Его настройка производится в соответствии с энергетическими характеристиками, предоставленными изготовителем турбины или полученными в процессе соответствующих натурных испытаний. При отсутствии ошибок в измерениях мощности, напора и воспроизведении этим блоком характеристики:
где Y1 - положение сервомотора регулирующего органа и PT - мощность, развиваемая турбиной, а H - действующий напор, будет обеспечиваться вывод агрегата на заданный уровень мощности без применения каких-либо способов последующей коррекции положения регулирующих органов. Так как характеристики турбины известны с ограниченной точностью и определение напора, действующего на турбину агрегата, вычисляется также с определенной погрешностью, то выходной сигнал блока 4 - величину сигнала задания положения сервомотора НА приходится корректировать, чтобы достигнуть требуемой точности реализации задания мощности. Для этого используется пропорционально-интегрирующий корректор (ПИ-корректор) 6 (например, параллельное соединение интегратора и усилителя ошибки, сигналы которых складываются на выходе блока или структуры изодромного типа (см. статью Башнина О.И. Управление мощностью гидравлических турбин (часть 2). Гидротехника XXI век, 2016, №1(25), стр. 47-49)), выходной сигнал которого суммируется с выходным сигналом задания перемещения сервомотора НА, сформированным нелинейным преобразователем 4. Устойчивость рассмотренной системы управления определяется настройками ПИ-корректора и передаточной функцией турбины как объекта управления мощностью. Способ управления, реализуемый структурой, приведенной на Фиг. 1, носит название «feed forward» управления. Т.е. управление с достаточно точным прогнозом положения регулирующего органа в будущем установившемся режиме, после затухания всех динамических отклонений мощности, возникших в переходном процессе.
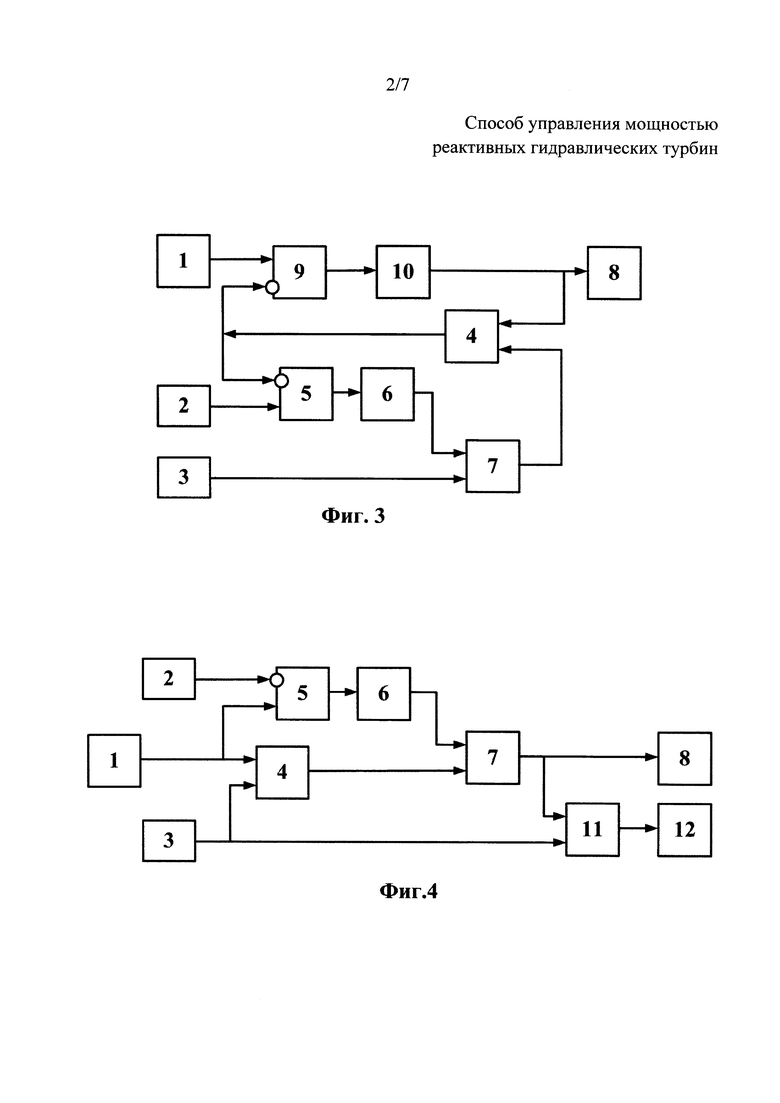
В авторском свидетельстве СССР №947821 «Устройство для формирования сигнала обратной связи системы управления гидроагрегатом» (М. Кл. G05B 11/01, опубл. 30.07.1982 г.) дается описание регулятора мощности гидравлической турбины, функциональная структурная схема которого изображена на Фиг. 2. В отличие от схемы на Фиг. 1 предсказание ожидаемого положения регулирующего органа осуществляется не блоком, формирующим зависимость (1), а замкнутым контуром модели «идеального управления». Входным для модели «идеального управления» является сигнал задатчика 1 мощности турбины. Модель состоит из выявителя 9 ошибки в отработке задания мощности нелинейным блоком 4, генерирующим выходной сигнал, пропорциональный мощности турбины в зависимости от величины задания положения регулирующего органа (его движение моделируется интегратором 10, выходной сигнал которого является заданием положения сервомотора НА для ЭГСС) и величины напора (датчик 3 напора). По существу модель «идеального управления» решает ту же задачу, что и система управления мощностью агрегата. Выходной сигнал выявителя 9 ошибки подается на вход интегратора 10, сигнал которого, являясь заданием положения Y1 сервомотора, изменяет выходной сигнал блока 4, воспроизводящего характеристику зависимости мощности турбины от положения сервомотора НА и напора:

до тех пор, пока PT не станет равным величине задания.
Так как в рассмотренном выше контуре всего один интегратор 10, то обеспечение необходимого быстродействия и устойчивости модели «идеального управления» не вызывает каких либо затруднений. При отсутствии неточностей в измерении напора и характеристики (2) ее монотонность по Y1 при любом Н гарантирует единственность точки равновесия при всех значениях Y1, обеспечивающих равенство выходного сигнала блока 4 и статической мощности агрегата. Ошибки в измерении напора и неточности в воспроизведении зависимости (2) компенсируются ПИ-корректором 6, выходной сигнал которого суммируется с выходным сигналом нелинейного блока 4. Выходной сигнал ПИ-корректора 6 будет изменяться до тех пор, пока величина сигнала сумматора 7 не станет равной сигналу преобразователя мощности турбины 2, и выходной сигнал выявителя рассогласования 5 не станет равным нулю. В структуре Фиг. 2 также используется идея «feed forward» способа управления: основная доля сигнала задания положения НА формируется интегратором 10, в соответствии с выходным сигналом обратной связи блока 4, воспроизводящего статическую характеристику (2) и заменяющего реальную турбину, а неточности характеристики блока 4 корректируются за счет аддитивной добавки к его выходному сигналу, формируемой ПИ-корректором 6, аналогично используемому для реализации, представленной на Фиг. 1.
Структурные схемы регуляторов мощности гидравлических турбин, представленные на Фиг. 1 и Фиг. 2, обладают одинаковыми динамическими свойствами и позволяют осуществлять управление мощностью турбин с ошибкой отработки задания меньшей 0,5% от номинальной мощности по отношению к выходному сигналу датчика активной мощности 2 генератора. Сигнал отрицательной обратной связи по активной мощности, поступающий на вход выявителя 5 рассогласования между заданием мощности и ее фактическим значением, кроме составляющей, равной статическому значению мощности при текущем положении регулирующих органов, содержит и паразитные составляющие. К ним можно отнести динамическую добавку, вызванную действием гидравлического удара, запаздывание, обусловленное не идеальным слежением гидропривода за сигналом задания и аккумуляцией механической работы в электромагнитном поле генератора. ПИ-корректоры 6 в описанных выше способах управления мощностью гидравлических турбин предназначены для компенсации статических ошибок «feed forward» канала управления при выводе агрегата в точку установившегося режима. Ошибки «feed forward» канала управления вызваны неточным воспроизведением характеристик турбины нелинейными блоками. Чем быстрее корректор компенсирует эти ошибки, тем точнее система выполняет управляющие команды. Однако быстрый ПИ-корректор 6, кроме статических ошибок управления, интегрирует и динамические ошибки, возникающие в переходных процессах. Кроме приемов компенсации динамических ошибок, описанных в статье Башнина О.И. «Управление мощностью гидравлических турбин», ссылка на который была приведена выше, эффективным будет решение, уменьшающее ошибку воспроизведения статических характеристик турбин и позволяющее ограничить входной сигнал ПИ-корректора 6, что приведет к уменьшению в его выходном сигнале наинтегрированной доли динамических ошибок.
Приведенные выше способы управления можно характеризовать как способы аддитивной коррекции погрешностей при воспроизведении нелинейных энергетических характеристик турбин. Это относится к структурам, реализующим оба рассмотренных ранее способа управления. Но у такого подхода есть существенный недостаток. Формула зависимости мощности турбины от положения сервомотора НА и напора с известной степенью приближения дается в книге у Кривченко Г.И. «Гидравлические машины. Турбины и насосы.» Москва, Энергия, 1978 г., стр. 75-77, 119-121, и выглядит следующим образом:
где PT(Y1, H) - мощность турбины при всех возможных значениях Y1, H; PT(Y1, H0)=ηT(Y1, H0)⋅Q(Y1, H0)⋅Н0 - мощность турбины в номинальном режиме; ηT(Y1, H0) и Q(Y1, H0) - коэффициент полезного действия и расход турбины при номинальном напоре H0.
Предположим, что погрешность измерения напора равна ΔH. Из (3) очевидно, что по мере изменения мощности, которая зависит от открытия регулирующих органов и растет вместе с увеличением открытия (член PT(Y1, H0)), ошибка в определении величины мощности по заложенным в нелинейный блок характеристикам будет возрастать с увеличением мощности и уменьшаться с ее уменьшением. Это требует непрерывного изменения величины выходного сигнала ПИ-корректоров 6, иногда и на значительную величину, если суммируются погрешности в задании функции нелинейного блока по величине перемещения и возникшие при измерении напора.
Таким образом, недостатком аддитивной коррекции значения выхода используемой в способах «feed forward» управления мощностью гидротурбин нелинейной зависимости мощности турбины от открытия и напора является несоответствие метода коррекции основной причине ошибки: неправильному измерению напора, действующего на турбину. Это несоответствие вызывает неоправданное увеличение диапазона изменения корректирующего сигнала и связанное с ним уменьшение быстродействия и качества системы управления.
Техническим результатом заявленного изобретения является увеличение быстродействия и уменьшение перерегулирования процессов управления мощностью гидротурбины, т.е. улучшение процесса управления. Данный технический результат достигается применением способа коррекции выходного сигнала нелинейной зависимости мощности турбины от положения сервомотора НА и напора путем изменения величины значения напора на входе соответствующего аргумента нелинейной зависимости, суммированием сигнала датчика напора с сигналом, вырабатываемым ПИ-корректором.
Если вместо суммирования сигнала ПИ-корректора 6 с сигналом задания положения сервомотора НА, как это делается в способе, реализованном в структуре Фиг. 1, или с выходным сигналом нелинейного преобразователя 4 воспроизведения зависимости мощности турбины от положения сервомотора НА и напора на Фиг. 2, просуммировать сигнал ПИ-корректора 6 с поступающим в систему управления сигналом напора, то при изменениях нагрузки диапазон требуемого изменения выходного сигнала ПИ-корректора 6 уменьшится. Это объясняется тем, что напор относительно мало изменяется при изменении мощности турбины, и в силу формулы (3) ошибка, допущенная при его измерении, не будет изменяться пропорционально величине мощности.
Структурная схема управления мощностью гидравлической турбины с моделью «идеального управления» и ПИ-коррекцией величины сигнала напора представлена на Фиг. 3. В отличие от структуры, представленной на Фиг. 2, выходной сигнал коррекции сумматора 7 суммируется не с выходным сигналом нелинейного блока 4, воспроизводящего статическую характеристику турбины, а с сигналом напора, поступающего от датчика напора 3.
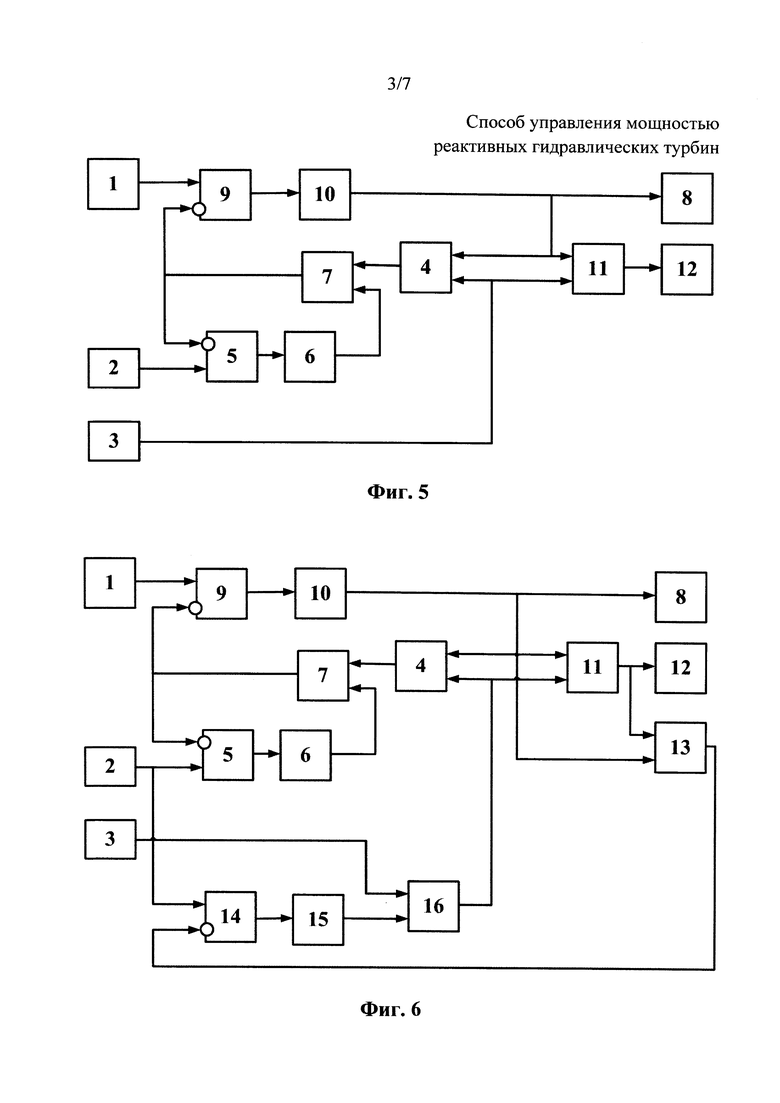
Схемы Фиг. 1, Фиг. 2 и Фиг. 3 могут успешно применяться и для управления реактивными турбинами с двумя регулирующими органами: лопатками направляющего аппарата и лопастями рабочего колеса. Как известно из книги Кривченко Г.И. «Гидравлические машины. Турбины и насосы», ссылка на которую была приведена ранее, в турбине с двумя регулирующими органами для достижения высокой экономичности осуществляется строго согласованное управление обоими регулирующими органами. Т.е. положение сервомотора привода угла разворота рабочего колеса (далее сервомотора РК) однозначно зависит от действующего напора нетто и положения сервомотора НА. Зависимость положения сервомотора РК от положения сервомотора НА и напора нетто называется комбинаторной зависимостью. Таким образом, зная положение сервомотора НА и напор, можно однозначно определить по комбинаторной зависимости положение сервомотора РК и мощность турбины. Формулы (1) и (2) могут быть использованы для создания каналов «feed forward» управления и моделей «идеального управления» в регуляторах мощности поворотно-лопастными и капсульными агрегатами. На Фиг. 4 представлена схема управления поворотно-лопастной турбиной, построенная по аналогии со схемой Фиг. 1, применяемой для управления радиально-осевой турбиной. В состав системы управления включен дополнительно нелинейный блок 11 формирования задания положения сервомотору привода 12 лопастей рабочего колеса. Нелинейный преобразователь 4 формирует большую долю сигнала задания положения сервомотору привода 8 НА. Формируемая им зависимость вида (1) рассчитывается при условии нахождения сервомотора лопастей турбины в комбинаторном положении в соответствии с зависимостью, задаваемой блоком 11. На Фиг. 5 представлена функциональная структура управления мощностью поворотно-лопастной гидротурбины с моделью «идеального управления», дополненная блоком формирования комбинаторных зависимостей 11, на входы которого подаются сигналы задания положения сервомотора НА и напора, выходной сигнал является заданием для привода 12 сервомотора РК. Нелинейный блок 4 в этом случае формирует зависимость мощности турбины от напора в соответствии с формулой (2), при этом лопасти считаются установленными в комбинаторное положение, как и в структуре на Фиг. 4. Формируемая блоком 4 нелинейная зависимость называется комбинаторной мощностью поворотно-лопастной турбины.
В статье «Двухпараметрический комбинаторный механизм для поворотно-лопастной турбины» (см. статью Башнина О.И. и др. «Двухпараметрический комбинаторный механизм для поворотно-лопастной турбины». «Гидротехника. XXI век». 2015. №2. стр. 44) показано, что повышение экономичности использования водных ресурсов поворотно-лопастными и капсульными агрегатами заключается в применении двухпараметрического комбинаторного механизма. Причиной неэффективного использования водотока являются погрешности в определении напора нетто, используемого как внешний параметр при формировании комбинаторной зависимости. При измерении напора нетто суммарная погрешность для низконапорных ГЭС (Н<20 м) может составить (-3,8±7,8)%, или в среднем 5,8% (см. 5. Методические указания по учету стока воды на гидроэлектрических станциях, п. 2.3. Погрешности измерения напора и учет потерь. РД 153-34.2-21.564-00, РАО ЕЭС, 2001 г.). Причем наибольших значений ошибки достигают при измерении низких напоров, характерных для пропуска больших расходов (паводок), а также маловодных периодов. Ошибки в определении расхода приводят к ошибкам в определении взаимного положения регулирующих органов поворотно-лопастных агрегатов и снижению коэффициента полезного действия (КПД) турбины. По оценкам некоторых авторов (см. статью Матвиенко Н.И., Лебедева В.Д. Идентификация комбинаторных характеристик поворотно-лопастных гидротурбин. Тр. МЭИ, М., №390, стр. 56-58), из-за несоблюдения комбинаторных зависимостей, напрасно потерянные объемы воды могут составлять от 2% до 7% среднегодового расхода агрегата. Ошибки в определении напора нетто могут быть объяснены не только неточностью гидравлических расчетов, но и самим определением напора нетто как разности полных удельных энергий воды на входе и выходе из турбины. Очевидно, что среднюю разность полных удельных энергий воды на входе и выходе из турбины можно оценить по мощности турбины, величину которой можно измерить намного точнее, чем рассчитать напор нетто по неточным оценкам расхода через турбину и локальным измерениям потерь напора, например, на сороудерживающих решетках.
В результате модельных испытаний можно получить два вида комбинаторных характеристик:
- параметризованные значением напора нетто:

- параметризованные значением мощности турбины:

В формулах (4) и (5) Y1 - положение сервомотора направляющего аппарата НА, Y2 - положение сервомотора лопастей рабочего колеса.
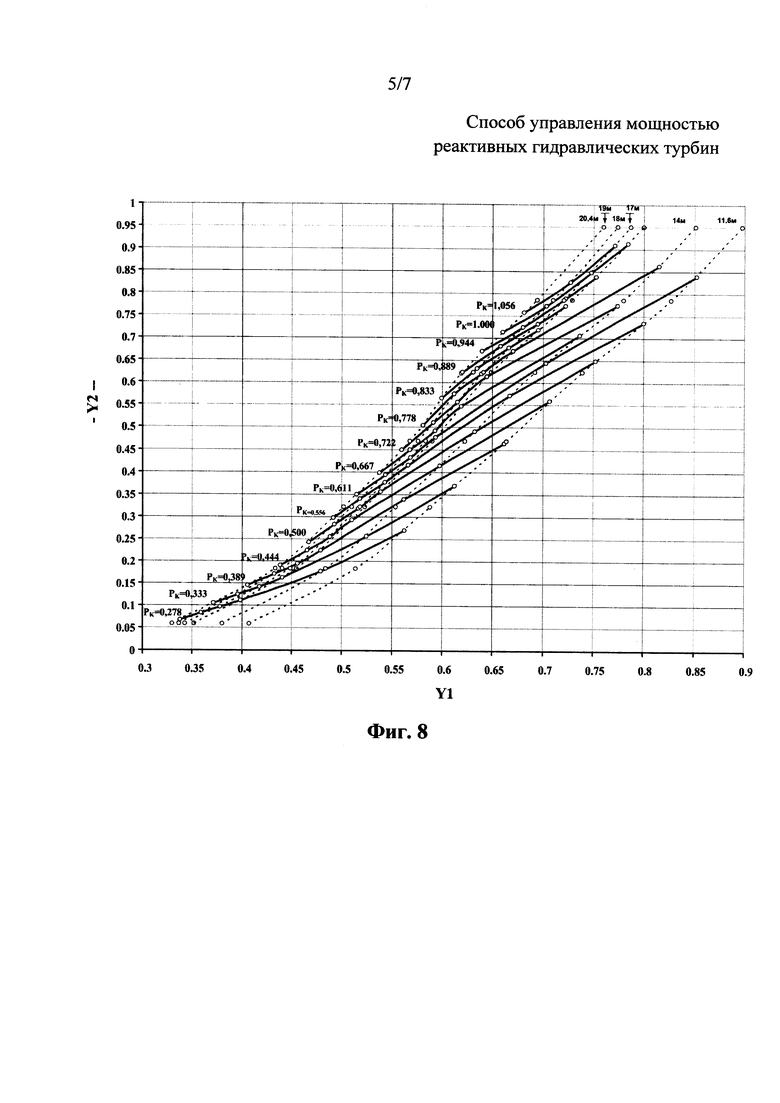
Комбинаторные зависимости агрегата Новосибирской ГЭС, построенные в соответствии с зависимостями (4) и (5), представлены на Фиг. 8. Прерывистые линии образуют семейство, задаваемое формулами (4), а сплошные линии семейство - формулами (5).
Переход от классических комбинаторных характеристик, задаваемых формулой (4), к комбинаторным характеристикам, параметризуемым величиной мощности турбины (5), методически не только правилен, но и более точен, так как величины мощностей как при испытаниях модели, так и турбины измеряются одинаковыми способами, а не рассчитываются, как напор нетто. Мощность является интегральным показателем преобразования энергии, так как в ней учитывается и напор нетто, и зависящий от него расход.
В патенте РФ №2608793 описан способ и приведена структурная схема регулятора мощности, использующая ПИ-корректор сигнала напора нетто по сигналу мощности турбины и положениям сервомоторов регулирующих органов, для улучшения настройки комбинаторного механизма. Способ заключается в дополнении системы управления мощностью турбины (см. Фиг. 5) корректором сигнала напора нетто. На Фиг. 6 представлена функциональная схема системы управления мощностью с моделью «идеального управления», в состав которой введены блок определения комбинаторной мощности 13, который по сигналам задания положений сервомоторов НА и РК определяет величину комбинаторной мощности, выявитель ошибки 14, выходной сигнал которого вычисляется как усиленная и ограниченная разность фактической и комбинаторной мощностей, а также ПИ-корректора 15, на вход которого подается сигнал выявителя ошибки, а выходной сигнал используется как одно из слагаемых блока суммирования (сумматор) 16, на второй вход подается сигнал датчика 3 напора агрегата, а выходной сигнал используется как величина напора нетто для блока формирования комбинаторной зависимости.
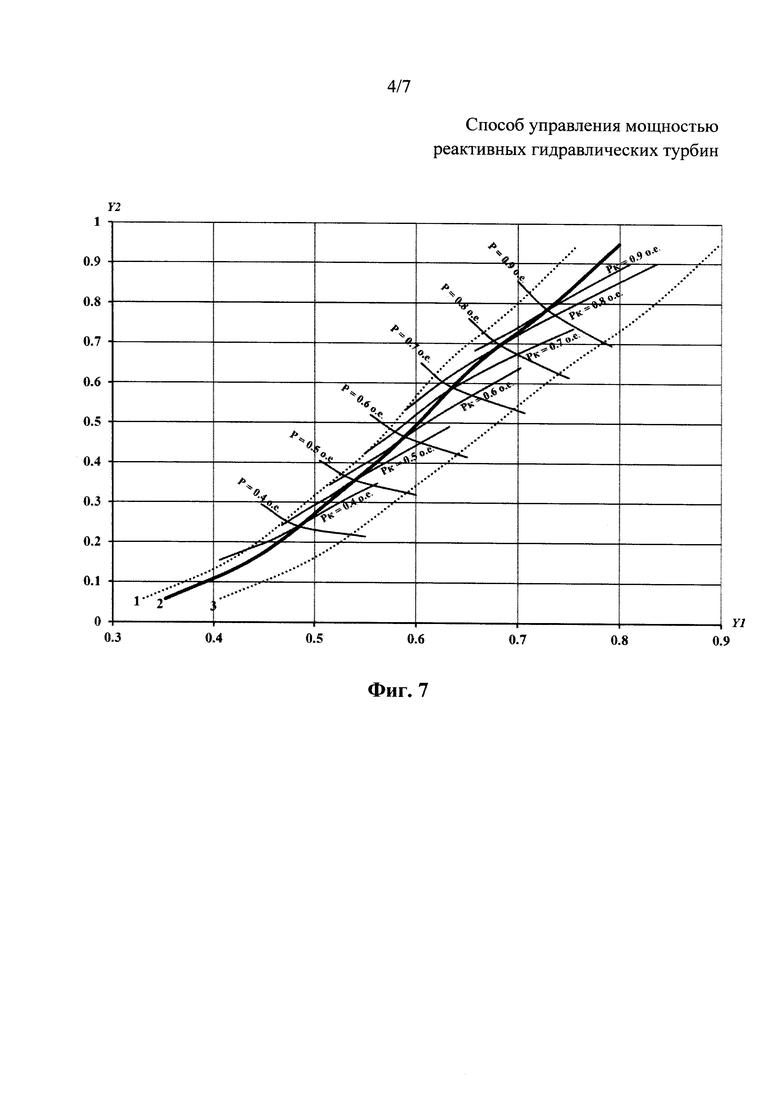
На Фиг. 7 на плоскости «Y1,Y2» (Y1 - положение сервомотора НА, Y2 - положение сервомотора РК) представлены: комбинаторные зависимости для максимального 1 и минимального 3 значений нетто напора, комбинаторная зависимость 2 для текущего постоянного значения напора нетто, Р - линии постоянной мощности при действующем постоянном напоре, PК - линии постоянной комбинаторной мощности. В патенте РФ №2608793 на основании анализа устойчивости контуров ПИ-корректора 6 сигнала нелинейного блока 4 (Фиг. 6) и ПИ- корректора 15 сигнала напора нетто сделан вывод о рациональности следующей стратегии организации траектории движения, изображающей положение регулирующих органов на плоскости «Y1,Y2» к точке равновесия. Показано, что точка пересечения равных мощностей: турбины и комбинаторной, при используемых в ПИ-корректорах выявителях рассогласований между заданной и фактической мощностями и между фактической и комбинаторной мощностями, является точкой устойчивого режима. При этом ПИ-корректор 6 напора нетто, изменяя настройку комбинаторной зависимости, вызывает движение изображающей взаимное положение регулирующих органов точки «Y1,Y2» под действием ПИ-корректора 6 выходного сигнала блока, воспроизводящего зависимость мощности от положения регулирующих органов и напора, вдоль линии постоянной мощности при постоянном, действующем в данный момент напоре. Так как в обоих выявителях рассогласования используется сигнал мощности турбины, отягощенный динамической добавкой, обусловленный действием гидравлического удара, то оба контура обладают примерно одинаковым быстродействием. Для получения хорошо выраженного движения по запланированной траектории быстродействие контуров должно быть разным, один из них должен быть «быстрым», а другой «медленным», т.е. система управления должна строиться по принципу: «корректор - корректора».
Система управления поворотно-лопастной турбиной, использующая комбинаторный механизм, настраиваемый по сигналу мощности, исправляет любые ошибки в измерении напора, а также изменения гидрологических условий. Перекосы напора вдоль плотины, непредвиденные течения в бьефах, не мешают правильной работе комбинаторного механизма с корректором сигнала напора нетто, так как практически контролируется режим турбоблока (турбина плюс отсасывающая труба), независимо от способа его конструктивного встраивания в сооружения ГЭС и течений в ее бьефах.
Недостатком функционального построения, представленного на Фиг. 6 способа повышения эффективности управления мощностью поворотно-лопастного агрегата, является высокая сложность структуры и неудовлетворительное качество переходных процессов при приблизительно одинаковом быстродействии корректоров ошибки как сигнала обратной связи в контуре мощности, так и неточности определения величины напора нетто, что затрудняет настройку контуров и может приводить к их взаимному раскачиванию. Для устойчивой работы устройства, выполненного по описанному способу, необходимо, чтобы быстродействие контура коррекции величины мощности было существенно выше, чем быстродействие контура коррекции величины напора нетто. Использование двух контуров коррекции ухудшает общее качество системы управления по сравнению с системами, имеющими один контур коррекции выходного сигнала нелинейного блока, воспроизводящего величину мощности по сигналам положения регулирующих органов и напора. Как показал анализ, причиной уменьшения быстродействия системы управления мощностью с дополнительной коррекцией сигнала напора по сравнению с системами ««feed forward» является неправильный выбор траекторий движения системы к точке равновесия на плоскости «Y1,Y2».
Целью предлагаемого нового способа управления мощностью реактивных гидравлических турбин является улучшение качества управления мощностью поворотно-лопастной гидравлической турбины, повышение быстродействия и упрощение настройки с одновременным уменьшением числа функций, выполняемых при обработке сигналов управления и систем измерения параметров состояния. Эта цель достигается путем формирования на плоскости «Y1,Y2» принципиально другого процесса приближения управляемой системы к точке равновесия: скольжения вдоль линии постоянной комбинаторной мощности PК=const (Фиг. 8) при постоянной ПИ-коррекции напора нетто, по сигналу рассогласования между измеренной и комбинаторной мощностями агрегата. Для этого в модели «идеального управления» в качестве сигнала обратной связи, подаваемого на вход выявителя рассогласования между сигналом задания мощности и фактической мощностью агрегата, вместо последней используется сигнал комбинаторной мощности, формируемый как функция сигналов заданий положений регулирующих органов, подаваемых на его входы с выходов интегратора модели «идеального управления» и формирователя комбинаторной зависимости, использующего для формирования сигнала задания положения сервомотора РК упомянутый выходной сигнал интегратора и выходной сигнал сумматора, на входы которого подается сигналы напора от системы измерения и выходной сигнал ПИ-корректора, входом для которого является величина рассогласования между фактической и комбинаторной мощностями.
Сущность заявляемого технического решения состоит в том, что в способе управления мощностью реактивных гидравлических турбин, включающем определение задания положения сервомотора привода лопастей рабочего колеса в соответствии с комбинаторной зависимостью по величине определенного в системе измерения параметров режима напора и заданию положения лопаток направляющего аппарата, согласно настоящему изобретению определение задания положения лопаток направляющего аппарата выполняется интегрированием рассогласования между сигналом задания мощности и значением нелинейной функции, равной величине мощности турбины, вычисленной по заводской или экспериментально снятой зависимости ее от задания положения этого сервомотора и задания положения разворота лопастей рабочего колеса, определенного по комбинаторной зависимости в предположении действия на турбину напора нетто, в последующем выявлении рассогласования между значением величины развиваемой турбиной мощности и значением упомянутой функции и коррекции используемого значения напора прибавлением к нему взвешенной суммы полученного рассогласования и интеграла от него.
Возможен вариант развития основного технического решения, заключающийся в том, что нелинейная зависимость мощности турбины определяется как функция задания положения сервомотора привода лопаток направляющего аппарата и определенного в системе измерения параметров режима напора.
Сущность заявляемого способа управления мощностью реактивных гидравлических турбин и возможность его практической реализации поясняется приведенным ниже описанием и схемами.
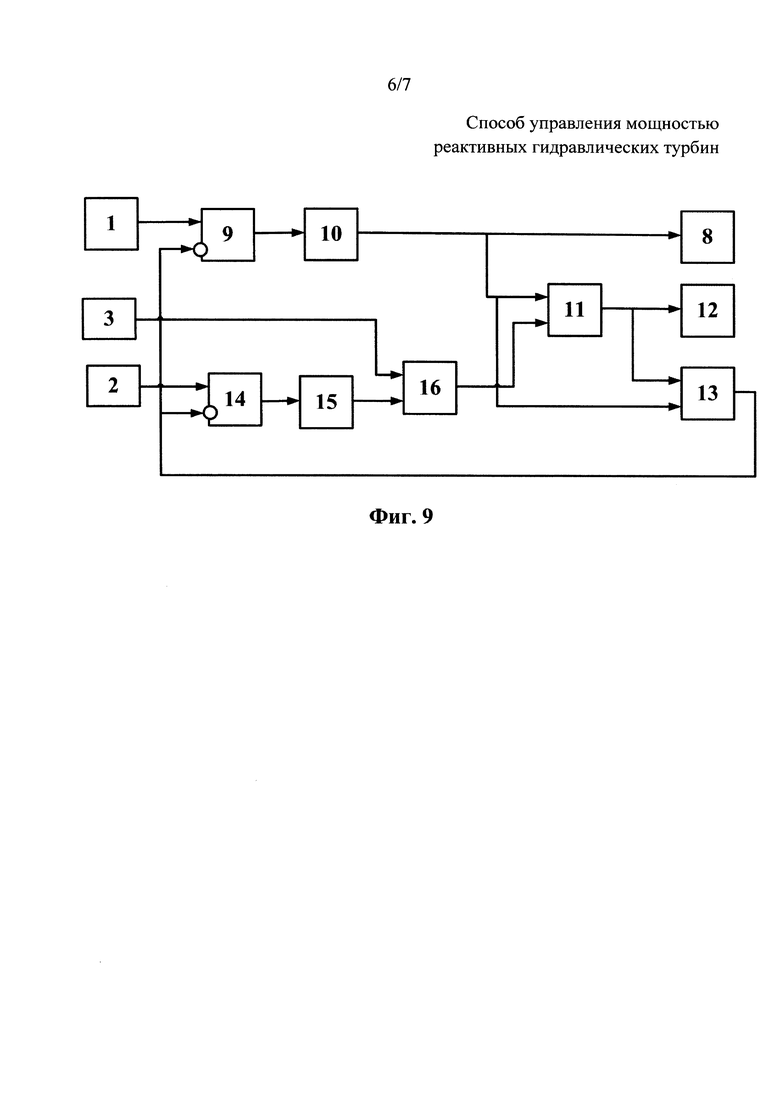
На Фиг. 9 представлена функциональная схема реализации предлагаемого способа. Контур модели «идеального управления» состоит из источника 1 сигнала задания мощности турбины, выявителя 9 ошибки отработки величины задания мощности моделью «идеального управления» комбинаторной мощностью, формируемой блоком определения комбинаторной мощности 13 как функции двух переменных от значений сигналов заданий положений сервомоторов направляющего аппарата и рабочего колеса, являющихся выходами интегратора 10 и блока формирования комбинаторной зависимости 11 соответственно, причем величина выходного сигнала последнего вычисляется по величинам выходных сигналов упомянутого интегратора 10 и сумматора 16 значений сигналов измеренного напора и выходного сигнала корректора его величины. Сигналы, определяющие величины заданий положений регулирующих органов турбины (открытия в свету лопаток направляющего аппарата и угла разворота лопастей рабочего колеса), зависят от двух внешних по отношению к контуру переменных сигналов: задания величины мощности турбины и сигнала напора нетто. Все остальные величины в контуре определяются по заложенным в блок формирования комбинаторных зависимостей 11 и блок определения комбинаторной мощности 13 зависимостям, полученным в результате испытания модели турбины или в процессе натурных исследований агрегата. В замкнутом контуре модели «идеального управления» присутствует только один интегрирующий элемент - интегратор 10, выход которого является сигналом задания для ЭГСС НА 8. Быстродействие этого контура зависит целиком от выбора постоянной времени интегратора 10 и коэффициента усиления выявителя ошибки 9, иными словами от разработчика регулятора. При фиксированном сигнале задания мощности и изменении величины сигнала напора модель «идеального управления» изменяет величину открытия, чтобы вернуться на определяемую величиной задания мощности линию постоянной комбинаторной мощности. На плоскости «Y1,Y2» (см. Фиг. 8) точка этой линии постоянства комбинаторной мощности, в которой прекращается изменения заданий на перемещение регулирующих органов, определяется ее пересечением с комбинаторной кривой, параметризованной задаваемым сигналом напора.
Если мощность, развиваемая турбиной, оказывается больше, чем комбинаторная, то это означает, что напор нетто агрегата больше, чем измеренный, и величина последнего нуждается в корректировке в сторону увеличения, в противном случае напор нетто агрегата будет меньше, чем измеренный, и его величина должна быть уменьшена. Выявитель ошибки 14, на входы которого поступают сигналы, пропорциональные мощности агрегата от датчика мощности 2 и блока определения комбинаторной мощности 13, вычитает из первого второй, а полученную разность усиливает и ограничивает (настройка постоянной времени и скорости изменения сигнала ПИ-корректора 15 сигнала выявителя ошибки), выходной сигнал выявителя подается на вход интегратора ПИ-корректора 15, а взвешенная сумма величины ошибки и выходного сигнала интегратора ПИ-корректора 15 сумматора 16 суммируются с выходным сигналом системы измерения напора, и полученный сигнал подается на вход блока формирования комбинаторных зависимостей 11. Изменение выходного сигнала комбинаторных зависимостей 11 вызывает изменение комбинаторной мощности на выходе блока определения комбинаторной мощности 13, что в свою очередь приводит к изменению заданий положения сервомоторов обоих регулирующих органов: выходные сигналы интегратора 10 и блока формирования комбинаторных зависимостей 11.
Высокое быстродействие контура модели «идеального управления» при настройке системы управления позволяет сосредоточить внимание только на обеспечении хорошего качества переходного процесса в контуре коррекции сигнала напора нетто. Следует заметить, что поскольку напор нетто при наборе нагрузки будет уменьшаться, то первоначальная установка сервомоторов регулирующих органов будет рассчитана на повышенный напор, и задание мощности будет отрабатываться на несколько меньшую величину, чем задано. В дальнейшем работа ПИ-корректора 15 приводит к уменьшению величины напора и происходит подтягивание мощности турбины к заданному уровню с постепенным смещением сервомоторов регулирующих органов в сторону увеличения открытия регулирующих органов. При снижении нагрузки в быстрой фазе отработки задания мощности при движении сервомоторов под управлением контура модели «идеального управления» наблюдается их более раннее, чем требуется, торможение. Снижение мощности в этом цикле управления не обеспечивает достижения требуемого уровня ее, далее под действием ПИ-корректора 15 происходит увеличение значения напора, что приводит к уменьшению величин открытия регулирующих органов и подтягиванию машины к требуемому уровню мощности.
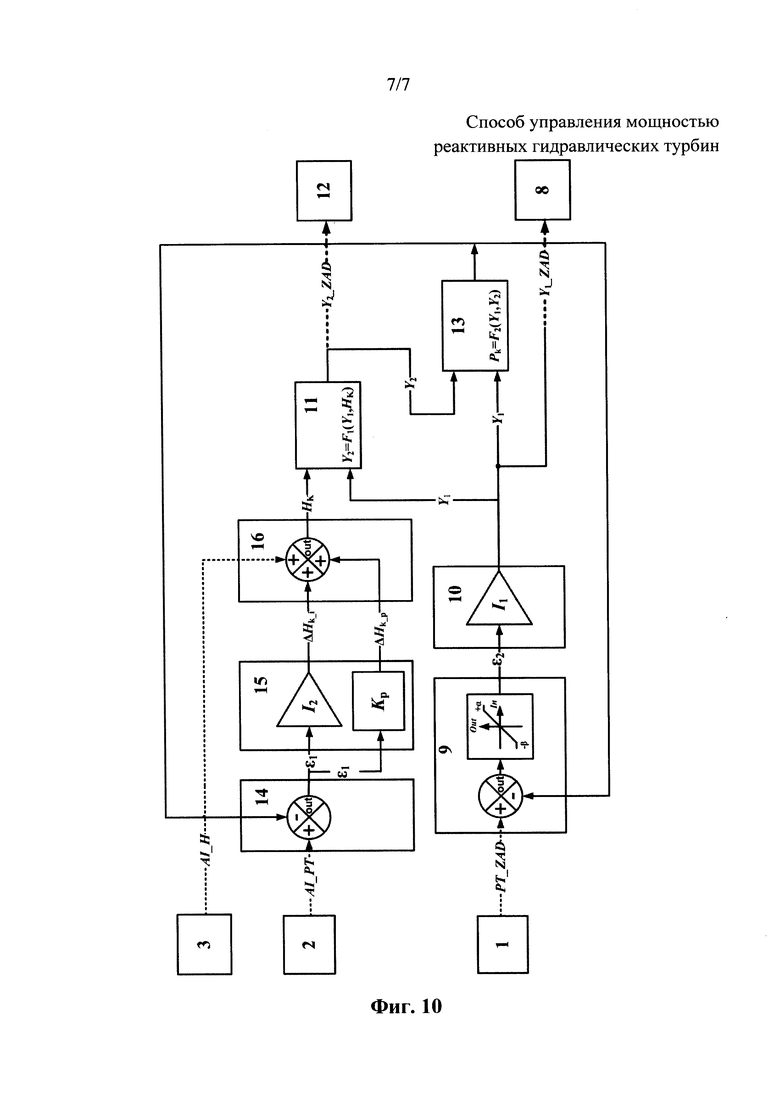
На Фиг. 10 представлена виртуальная функциональная схема, реализуемая алгоритмом микропроцессорной системы управления мощностью поворотно-лопастного агрегата. Сигналы, вводимые в систему управления мощностью и выводимые из нее для управления приводами, имеют специальные обозначения и обозначены пунктирными линиями. В контроллер приходят аналоговые сигналы датчика 2 мощности турбины  и датчика напора
и датчика напора  , а также цифровой код задания мощности
, а также цифровой код задания мощности  от задатчика мощности 1 станционного уровня управления. Управляющими сигналами являются выход
от задатчика мощности 1 станционного уровня управления. Управляющими сигналами являются выход  интегратора 10 задания положения сервомотора привода ЭГСС НА 8 и выход
интегратора 10 задания положения сервомотора привода ЭГСС НА 8 и выход  блока формирования комбинаторной зависимости 11 задания положения сервомотора привода 12 лопастей рабочего колеса. Предварительно, по предоставленным заводом изготовителем пропеллерным характеристикам турбины и комбинаторной зависимости Y2=F1(Y1,HK), параметризованной напором нетто HK (4), выполняется расчет зависимости комбинаторной мощности от положении сервомоторов регулирующих органов PK=F2(Y1, Y2). Полученные зависимости записываются в блок 11 формирования комбинаторной зависимости и в блок определения комбинаторной мощности 13. Такт интегрирования для интегратора 10 выбирается из условия обеспечения малой постоянной времени контура модели «идеального управления». При таймерном интервале выполнения программы системой управления равном Т0 минимально достижимая постоянная времени в контуре интегратора 10, блока 13 определения комбинаторной мощности и выявителя ошибки 9 не может быть меньше Т0, но выбором коэффициента усиления выявителя ошибки может быть сделана сколь угодно близкой к Т0. Выходной сигнал Y1 интегратора 10 и выходной сигнал HK сумматора 16 сигнала от датчика напора 3 измерения напора и сигнала ПИ-корректора величины напора поступают на вход блока 11 формирования комбинаторной зависимости, вырабатывающей сигнал Y2, который совместно с сигналом Y1 служит для вычисления значения комбинаторной мощности в блоке 13 определения комбинаторной мощности. Полученное значение комбинаторной мощности PK=F2(Y1, Y2) сравнивается с измеренным значением
блока формирования комбинаторной зависимости 11 задания положения сервомотора привода 12 лопастей рабочего колеса. Предварительно, по предоставленным заводом изготовителем пропеллерным характеристикам турбины и комбинаторной зависимости Y2=F1(Y1,HK), параметризованной напором нетто HK (4), выполняется расчет зависимости комбинаторной мощности от положении сервомоторов регулирующих органов PK=F2(Y1, Y2). Полученные зависимости записываются в блок 11 формирования комбинаторной зависимости и в блок определения комбинаторной мощности 13. Такт интегрирования для интегратора 10 выбирается из условия обеспечения малой постоянной времени контура модели «идеального управления». При таймерном интервале выполнения программы системой управления равном Т0 минимально достижимая постоянная времени в контуре интегратора 10, блока 13 определения комбинаторной мощности и выявителя ошибки 9 не может быть меньше Т0, но выбором коэффициента усиления выявителя ошибки может быть сделана сколь угодно близкой к Т0. Выходной сигнал Y1 интегратора 10 и выходной сигнал HK сумматора 16 сигнала от датчика напора 3 измерения напора и сигнала ПИ-корректора величины напора поступают на вход блока 11 формирования комбинаторной зависимости, вырабатывающей сигнал Y2, который совместно с сигналом Y1 служит для вычисления значения комбинаторной мощности в блоке 13 определения комбинаторной мощности. Полученное значение комбинаторной мощности PK=F2(Y1, Y2) сравнивается с измеренным значением  в выявителе ошибки 14. Сигнал выявленного отклонения комбинаторной мощности от фактически развиваемой турбиной в ПИ-корректоре 15 интегрируется, затем выходной сигнал интегратора корректора и усиленная в нем в Kp раз величина полученного отклонения добавляются в сумматоре 16 к величине измеренного напора.
в выявителе ошибки 14. Сигнал выявленного отклонения комбинаторной мощности от фактически развиваемой турбиной в ПИ-корректоре 15 интегрируется, затем выходной сигнал интегратора корректора и усиленная в нем в Kp раз величина полученного отклонения добавляются в сумматоре 16 к величине измеренного напора.
Для ПЛ-турбины Новосибирской ГЭС величина постоянной времени отработки задания мощности P_ZAD выходной мощностью PK(t)=F2(Y1(t),Y2(t)) модели «идеального управления» зависит от величины напора нетто и определяется таймерным интервалом 0,03 с (один из обычно выбираемых для устройств управления энергетическими агрегатами, вырабатывающими переменный ток частотой 50 Гц). При изменении напора HK в два раза для условий рассматриваемой ГЭС и при выборе постоянной времени Tm для максимального напора равной 0,03 с для минимального напора она увеличится в раза и будет меньше 0,1 с. Постоянная времени интегратора ПИ-корректора 15 напора нетто должна быть больше, чем определяющая скорость затухания динамических составляющих мощности в процессе управления постоянная времени гидравлического удара в водоводе агрегата. Для агрегата Новосибирской ГЭС постоянная времени гидравлического удара в водоводе агрегата равна 1,8 с. Таким образом, соотношения постоянных времени контура управления «идеальной моделью» и контура ПИ-коррекции напора нетто исключают их влияние друг на друга в процессе управления.
раза и будет меньше 0,1 с. Постоянная времени интегратора ПИ-корректора 15 напора нетто должна быть больше, чем определяющая скорость затухания динамических составляющих мощности в процессе управления постоянная времени гидравлического удара в водоводе агрегата. Для агрегата Новосибирской ГЭС постоянная времени гидравлического удара в водоводе агрегата равна 1,8 с. Таким образом, соотношения постоянных времени контура управления «идеальной моделью» и контура ПИ-коррекции напора нетто исключают их влияние друг на друга в процессе управления.
В соответствии с приведенным ранее описанием обработка внешнего управляющего сигнала Р_ZAD, сигналов AI_PG и AI_H, характеризующих состояние объекта управления, а также сигналов, определяющих состояние системы управления Y1 и Y2, используемых на выходе в качестве сигналов задания Y1_ZAD и Y2_ZAD положений сервомоторов приводов регулирующих органов, в представленной на фиг. 10 функциональной схеме реализуется следующим образом.
Предполагается, что история вычислений и полученные результаты сохранены в ретроперспективе на необходимую глубину.
1. Определяется выходной сигнал интегратора модели «идеального управления»:

2. Определяется выходной сигнал интегратора корректора напора
нетто.

3. Вычисляется значение напора нетто на текущем шаге управления.

4. По комбинаторной зависимости Y2(t)=F1(Y1,HK(t)) для текущего значения напора HK(t) определяется величина Y2(t) для вычисления комбинаторной мощности в модели идеального управления
5. По зависимости PK(t)=F2(Y1(t),Y2(t)) для текущих значений Y1(t) и Y2(t) вычисляется величина комбинаторной мощности.
6. Выявитель ошибки 14 вычисляет ошибку управления мощностью турбины по выходным сигналам, формируемым в контуре управления «идеальной моделью:
 .
.
7. Выявитель рассогласования 9 контура управления «идеальной моделью» вычисляет величину ошибки между заданной мощностью и выходным сигналом «идеальной модели» - комбинаторной мощностью, усиливает получившийся сигнал и ограничивает его:

8. Вывод новых заданий для положений сервомоторов приводов лопаток направляющего аппарата и лопастей рабочего колеса:
 ;
;
9. Возврат в начало.
Таким образом, применение аддитивной ПИ-коррекции поступающего от системы измерения сигнала напора, используемого в формировании нелинейных зависимостей мощности турбины по сигналам положения регулирующих органов и напора в системах управления мощностью реактивных гидравлических турбин, позволяет достичь заявленный технический результат данного способа управления мощностью реактивных гидравлических турбин, а именно: повысить точность и быстродействие этих систем, а в случае применения ее в системах управления поворотно-лопастными турбинами не только упростить их настройку и улучшить качество управления, но и повысить коэффициент полезного действия турбин, при условии воспроизведения зависимости мощности последней от напора и положений сервомоторов регулирующих органов выполняется последовательным определением сначала положения сервомотора привода лопастей рабочего колеса по комбинаторной характеристике как функции от положения сервомотора привода лопаток направляющего аппарата и скорректированной величины напора, а затем как функции от положений сервомоторов приводов лопаток направляющего аппарата и лопастей рабочего колеса.
Изобретение относится к области автоматического управления агрегатами гидроэлектростанций (ГЭС) и предназначено для использования в системе ведения режима агрегата ГЭС с реактивной турбиной в соответствии с задаваемой верхним уровнем управления величиной электрической мощности. Определение задания положения лопаток направляющего аппарата выполняется интегрированием рассогласования между сигналом задания мощности и значением нелинейной функции, равной величине мощности турбины, вычисленной по заводской или экспериментально снятой зависимости ее от задания положения этого сервомотора и задания положения разворота лопастей рабочего колеса, определенного по комбинаторной зависимости в предположении действия на турбину напора нетто; в последующем выявлении рассогласования между значением величины развиваемой турбиной мощности и значением упомянутой функции и коррекции используемого значения напора прибавлением к нему взвешенной суммы полученного рассогласования и интеграла от него. Изобретение направлено на повышение точности и быстродействия этих систем, а в случае применения его в системах управления поворотно-лопастными турбинами позволяет не только упростить их настройку и улучшить качество управления, но и повысить коэффициент полезного действия турбин. 1 з.п. ф-лы, 10 ил.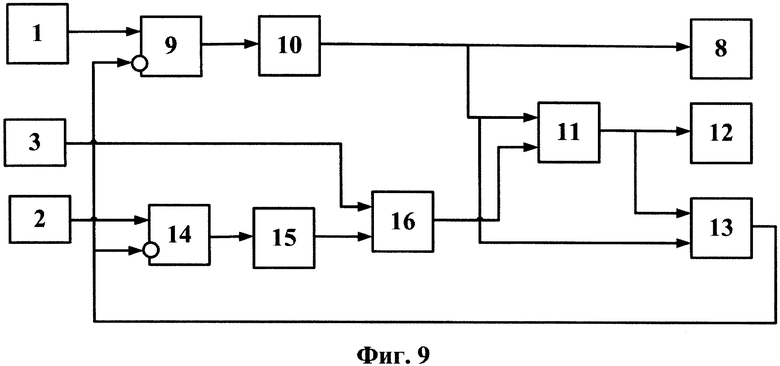
1. Способ управления мощностью реактивных гидравлических турбин, включающий определение задания положения сервомотора привода лопастей рабочего колеса в соответствии с комбинаторной зависимостью по величине определенного в системе измерения параметров режима напора и заданию положения лопаток направляющего аппарата, отличающийся тем, что определение задания положения лопаток направляющего аппарата выполняется интегрированием рассогласования между сигналом задания мощности и значением нелинейной функции, равной величине мощности турбины, вычисленной по заводской или экспериментально снятой зависимости ее от задания положения этого сервомотора и задания положения разворота лопастей рабочего колеса, определенного по комбинаторной зависимости в предположении действия на турбину напора нетто, в последующем выявлении рассогласования между значением величины развиваемой турбиной мощности и значением упомянутой функции и коррекции используемого значения напора прибавлением к нему взвешенной суммы полученного рассогласования и интеграла от него.
2. Способ управления мощностью реактивных гидравлических турбин по п.1, отличающийся тем, что нелинейная зависимость мощности турбины определяется как функция задания положения сервомотора привода лопаток направляющего аппарата и определенного в системе измерения параметров режима напора.
| Способ и устройство повышения точности управления углом установки лопастей поворотно-лопастной турбины | 2015 |
|
RU2608793C2 |
| Устройство для формирования сигнала обратной связи системы управления гидроагрегатом | 1977 |
|
SU947821A1 |
| РЕГУЛЯТОР ГИДРОТУРБИНЫ'i'fi "\ | 0 |
|
SU274993A1 |
| Способ перевода гидроагрегата из режима группового в режим индивидуального регулирования | 1971 |
|
SU344755A1 |
| WO 2015157852 A1, 22.10.2015 | |||
| WO 2015067558 A1, 14.05.2015. | |||

