1
Изобретение относится к области автоматики и вычислительной техники и может быть использовано, например, в качестве регулятора в многомерных системах управления технологическими процессами.
Известен многоканальный регулятор 1, содержащий задатчики, датчики, генератор, коммутатор, усилитель, объект управления. Недостатком его является постоянство и тервалов времени, в течение которых осуществляется связь одного из каналов с общей частью регулятора, что при различных скоростях изменения контролируемых параметров не обеспечивает оптимального процесса управления.
Известен также регулятор 2 , содержащий задатчики, датчики, входы которых через объект регулирования соединены с выходом дифференциального усилителя, и генератор. В указанном регуляторе йроизводится изменение времени воздействия входной величины по соответствующему каналу регулирования в зависимости от динамических свойств объекта. Недостатком же этого регулятора является его функциональная сложность и наличие большого числа зпементоЕ, входящих в блоки управления н коррекции,
Цель изобретения - упрощение и повыиение надежности регулятора. Это достигйэтся тем, что многоканальный регулятор содержит последовательно соединенные дифференциатор, блок выделения абсолютной величины, делитель, интегратор н два блока подстройки параметра, выполненных на электронно-лучевых трубках типа политроп, коллекторы первого из которых соединены со входами дифференциального усилителя. ; вто рого - со входом дифференциатора; ряд функциональных пластин первого и втс рого блоков подстройки параметра подключен к выходам датчиков, нижний ряд ф5-ккциональных пластин первого блока подст-ройки параметра подключен к выходам задатчиков, а второго - соединен меноду сэбой. горизонтально отклоняющие пластины nepEciго блока подстройки параметра соединены с выходом интегратора, а второго блока подстройки параметра - с выходом генератора.
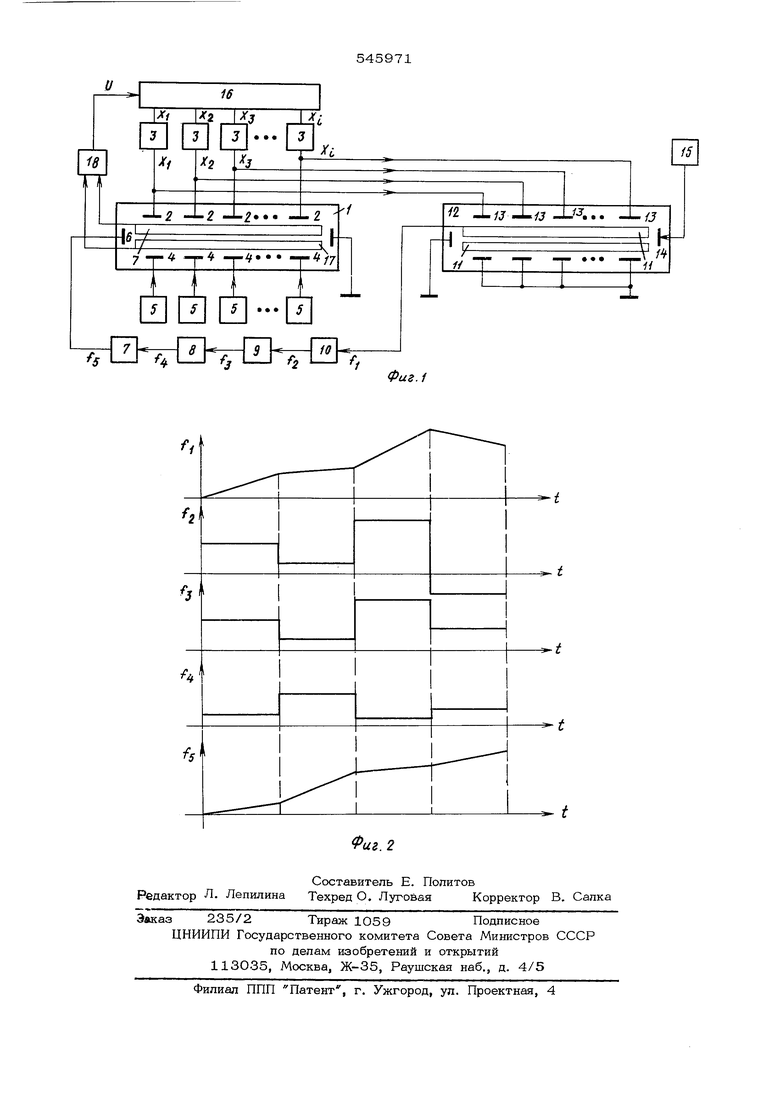
На фиг. 1 представлена блок-схема иред. лагаемого регулятора; на фиг. 2 - графичес
кие аависимосги на выходах элементов схемы для случая регулирования по четырем йараметрам.
Регулятор содержит эпектроннск лучевую трубку политрон 1, один ряд функциональных пластин 2 которой соединен с датчиками 3 скоростей изменения контролируемых параметров, а другой ряд функциональных пластин 4 - с задатчиками 5 начальных условий работы Горизонтально отклоняющие пластины 6 через интегратор 7, делитель 8, устройство выделения абсолютной величины 9 и дифференциатор 10 соединены с коллекторами 11 другого политрона 12, функциональные пластины 13 которого также связаны с датчиками 3 скоростей, а его горизонтально отклоняющие пластины 14 соединены с выходом генератора 15 линейно-изменяющегося напряжения. Управляющее воздействие на объект управления 16 снимается с коллекторов 17 ЭЛТ-1 через дифференциальный усилитель 18,
Многоканальный регулятор работает еле дующим образом.
Поскольку для данной схемы управляющее воздействие 17 (. ) является функцией непрерывной во времени, то для йаиболее быстро изменяющегося параметра Х(. достаточно просто увеличить время нахождения луча под соответствующей парой функциональных пластин 2 и 4 при одном и том же общем периоде обегания всех пар Тр, т.е. это время At, должно быть пропорционально скорости изменения -го контролируемого параметра ut, .кх, ,
1огда напряжения на горизонтально отклоняющих пластинах 6 политрона 1 должно меняться по такому закону, чтобы скорость движения электронного луча под каждой парой функциональных пластин 2 и 4 была обратно пропорциональна скорости изменения Xj L -го регулируемого параметра.
Регулируемыевеличины ...,X4 с объекта управления 16 через датчики 3 скоростей, представляющие собой дифференцирующие устройства,- поступают одновременно на функциональные пластины 2 политрона 1 и функциональные пластины 13 политрона 1
Политрон 1 выполняет роль собственно многоканального регулятора, а политроп 12 служит для измерения скорости измене.ия ,Х.2-,.,.Х(, регулируемых параметров последовательно во времени и формирует непрерывную временную функцию f Ci) за счет перемещения электоонного луча вдоль пластин 13 под действием напряжения с выхода генератора 15, подключенного к горизонтально отклоняющим пластинам 14.
Временная зависимость напряжения f (t) с коллекторов 11 политрона 12 через дифференциатор 10, устройство абсолютной величины 9 (устройство 9 необходимо для повыщения точности работы делителя 8 и последующего формирования монотонной функции с помощью интегратора 7), делитель 8, реализующий гиперболическую зависимость f 4 1 интегратор 7 подается на пластины 6 политрона 1.
При этом управляющее воздействие U , снимаемое с коллекторов 17 политрона 1 через дифференциальный усилитель 18 на объект управления, зависит от соотнощения скоростей изменения регулируемых параметров.
На фиг. 2 показаны временные диаграммы на выходах элементов 12, 10, 9, 8 ч 7 структурной схемы 1, демонстрирующие процесс формирования необходимого напряжения на пластинах 6 политрона 1 для соотношения скоростей Х, 7 X, Х2(4С 0)
на выходах датчиков 3. Это соотношение может произвольно меняться в процессе работы объекта управления 16.
Формула изобретения Многоканальный регулятор, содержащий задатчики, датчики, входы которых через объект регулирования соединены с выходом дифференциального усилителя, и генератор, отличающийся тем, что, с целью упрощения и повышения надежности регулятора, он содержит последовательно соединенные дифференциатор, блок выделения абсолютной величины, делитель, интегратор и два блока подстройки параметра, выполненных на электронно-лучевых трубках типа политрон, коллекторы первого из которых соединены со входами дифферег-щиального усилителя, а второ1 о - со входом дифференциатора, верхний ряд функциональных пластин первого и второго блоков подстройки параметра подключен к выходам датчиков, нижний ряд функциональных пластин первого блока подстройки параметра подключен к выходам задатчиков, а второго - соединен между собой, горизонтально отклоняющие пластны первого блока подстройки параметра соединены с выходом интегратора, а второго блока подстройки параметра - с выходом генератора.
Источники информации, принятые во внимание при экспертизе:
1.Авт. свид СССР № ЗЗО427, кл, 3, 05 В 11/32. О4.05.70 г.
2.Авт. свид. СССР № 334558, кл. G, 05 23/19, 17.11.7О г. (прототип).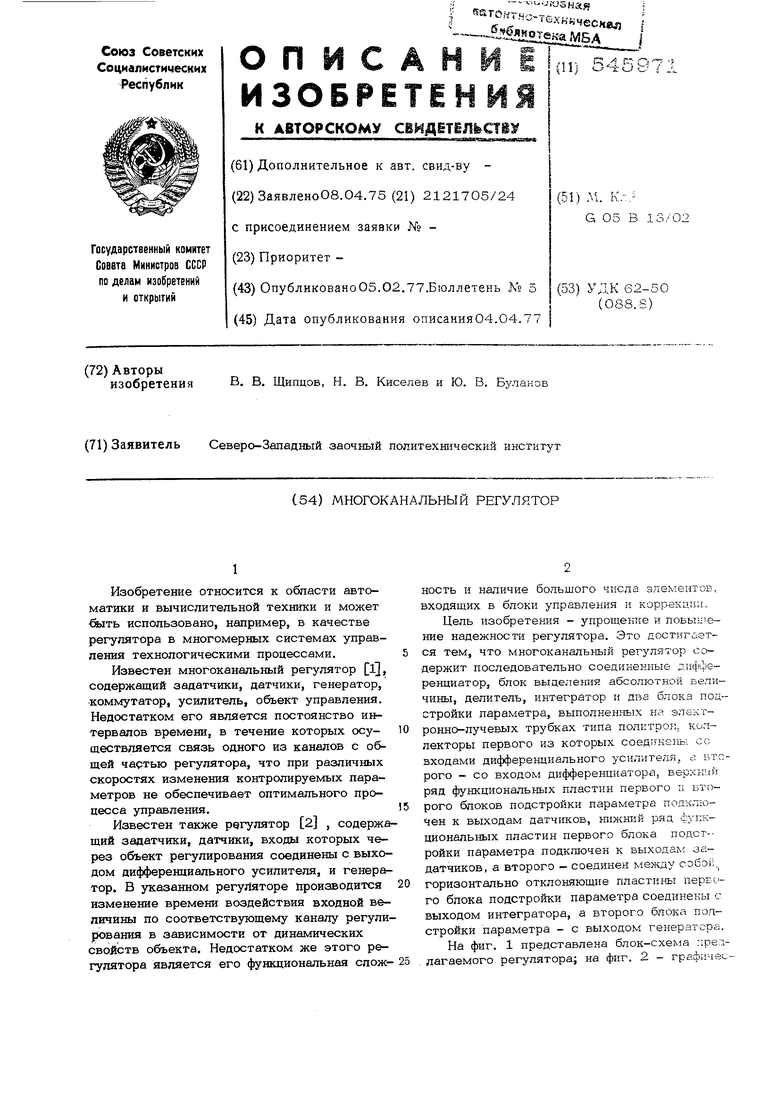
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ БИОЭНЕРГЕТИЧЕСКИХ И ИНФОРМАЦИОННЫХ ПОЛЕЙ | 1999 |
|
RU2154983C1 |
| Устройство для классификации случайных процессов | 1987 |
|
SU1430973A1 |
| Анализатор функций плотности распределения | 1978 |
|
SU752354A2 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПО УГЛУ ТАНГАЖА | 2010 |
|
RU2445671C2 |
| Устройство для классификации случайных процессов | 1984 |
|
SU1251121A1 |
| Программный регулятор температуры | 1978 |
|
SU796810A1 |
| Анализатор функций плотности распределения | 1981 |
|
SU987638A1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ | 2015 |
|
RU2605946C1 |
| Устройство для классификации случайных процессов | 1977 |
|
SU665307A1 |
| Автомат-настройщик двухконтурных систем регулирования с опережающим сигналом | 1987 |
|
SU1624245A1 |