Изобретение относится к области систем автоматического управления нестационарным объектом с дифференцирующим входом, а именно к системам управления самолетом по углу тангажа.
Известна адаптивная система управления самолетом по углу тангажа, содержащая последовательно соединенные задатчик угла тангажа, первый сумматор, первый усилитель, второй сумматор, первый интегратор, объект управления (самолет) и датчик угла, выход которого соединен со вторым входом первого сумматора, выход объекта управления через последовательно соединенные датчик угловой скорости, первый дифференциатор, второй усилитель и третий сумматор соединен со вторым входом второго сумматора, а выход датчика угловой скорости через третий усилитель подключен ко второму входу третьего сумматора.
Недостатком адаптивной системы является то, что в ней нет возможности регулирования положения нуля передаточной функции системы управления, что ограничивает возможность задания желаемых быстродействия и вида переходных процессов путем фиксации положения нуля передаточной функции системы в заданных положениях на плоскости корней, когда параметры объекта управления меняются в широких интервалах.
С целью исключения вышеперечисленных недостатков система содержит датчик параметра, задатчик параметра, два блока умножения, четвертый, пятый и шестой сумматоры, вторые интегратор и дифференциатор, эталонную модель, четвертый и пятый усилители, выход первого интегратора через первый блок умножения соединен с третьим входом второго сумматора, выход датчика параметра через четвертый сумматор подключен ко второму входу первого блока умножения, а выход задатчика параметра соединен со вторым входом четвертого сумматора, выход первого усилителя через последовательно соединенные эталонные модель, пятый сумматор, четвертый усилитель, второй интегратор, шестой сумматор, второй блок умножения и пятый усилитель соединен с третьим входом четвертого сумматора, вход второго дифференциатора соединен со вторым входом пятого сумматора, вход объекта управления соединен со вторым входом второго блока умножения, а выход через последовательно соединенные шестой сумматор и второй дифференциатор - с третьим входом пятого сумматора.
На чертеже представлена система автоматического управления самолетом по углу тангажа, где приняты следующие обозначения:
1 - задатчик угла тангажа
2, 3, 4, 5 - соответственно первый, второй, третий и четвертый сумматоры
6, 7 - соответственно первый и третий усилители
8 - первый интегратор
9 - объект управления (самолет)
10 - первый блок умножения
11 - датчик параметра
12 - задатчик параметра
13 - датчик угловой скорости
14 - датчик угла (тангажа)
15 - первый дифференциатор
16 - второй усилитель
17 - четвертый усилитель
18 - второй интегратор
19 - второй дифференциатор
20 - второй блок умножения
21 - пятый усилитель
22 - эталонная модель
23, 24 - пятый и шестой сумматоры соответственно
ϑ(t) - угол тангажа
ϑЗ(t)- сигнал задания угла тангажа
Это позволяет повысить качество переходных процессов в системе управления самолетом по углу тангажа при существенном изменении параметров объекта управления (самолета) [1].
По каналу тангажа динамику самолета можно представить в виде дифференциального уравнения

где сl, c2, nB и n22 - медленно меняющиеся во времени по известным законам параметры [1].
Выберем эталонную модель

и на основании (1) и (2) запишем уравнение невязки ε(t)


Введем обозначения

Выберем функцию Ляпунова

и определим ее полную производную по времени

Согласно второму методу Ляпунова, чтобы система управления была устойчива, достаточно выполнения условия

Из (7) и (8) получим, что Δn22(t) должен меняться, например, по закону

Заметим, что из равенства (9)

и для формирования n22(t) требуется значение σ(t) в виде (5), для чего необходимы производные  , которые на практике точно реализовать не удается. Попытаемся понизить порядок необходимых производных на единицу.
, которые на практике точно реализовать не удается. Попытаемся понизить порядок необходимых производных на единицу.
Для этого запишем очевидное равенство

С учетом (10) и (11) получим

Ввиду того, что  была получена из условия удовлетворения неравенству (8), то очевидно, что использование вместо сигнала
была получена из условия удовлетворения неравенству (8), то очевидно, что использование вместо сигнала  сигнала вида
сигнала вида  сохранит знак производной функции Ляпунова
сохранит знак производной функции Ляпунова  системы управления (1)-(12).
системы управления (1)-(12).
Синтезированная адаптивная системе управления самолетом по углу тангажа представлена на чертеже.
Разность сигналов υ3 и υ после усиления первым усилителем 2 проходит через второй сумматор 3 и интегратор 8 и поступает в качестве сигнала управления u(t) на вход объекта управления 9. Сдатчика угловой скорости 13 сигнал поступает через дифференциатор 15 и второй усилитель 7 соответственно на первый и второй входы третьего сумматора 4, на выходе которого формируется сигнал обратной связи по скорости тангажа  и ускорению
и ускорению  в виде их суммы. Результирующий сигнал с выхода третьего сумматора 4 поступает на второй вход второго сумматора 3, на выходе которого получается сигнал алгебраической суммы сигнала u0(t), сигнал с выхода блока умножения 10 и сигнала с выхода третьего сумматора 4. Передаточная функция объекта управления 9 (самолета) по скорости изменения угла тангажа W0(t) имеет вид [1]
в виде их суммы. Результирующий сигнал с выхода третьего сумматора 4 поступает на второй вход второго сумматора 3, на выходе которого получается сигнал алгебраической суммы сигнала u0(t), сигнал с выхода блока умножения 10 и сигнала с выхода третьего сумматора 4. Передаточная функция объекта управления 9 (самолета) по скорости изменения угла тангажа W0(t) имеет вид [1]
а фильтр с переменными параметрами образован вторым сумматором 3, интегратором 8, блоком умножения 10, четвертым сумматором 5, датчиком параметра 11 и задатчиком параметра 12.
В [3] показано, что такое построение фильтра с переменным параметром позволяет обеспечить желаемый нуль системы управления λ
 ,
,
где n22 - параметр передаточной функции объекта управления,  - параметр фильтра с переменным параметром 16.
- параметр фильтра с переменным параметром 16.
Выбором параметра  фильтра с переменным параметром 16 можно обеспечить желаемый переходный процесс.
фильтра с переменным параметром 16 можно обеспечить желаемый переходный процесс.
Однако при изменении параметра n22 самолета во времени в широких интервалах переходный процесс отклоняется от желаемого, заданного выходом эталонной модели 22, поэтому необходимо подстраивать параметр n22 путем добавления сигнала параметрической компенсации Δn22. Сигнал компенсации Δn22 формируется контуром адаптации, составленным блоками 17-24, которые реализуют закон настройки параметра n22 по формуле (10). При этом сигнал u0(t) поступает на входы эталонной модели 22 и выход объекта управления 9 в пятом сумматоре сравниваются и сигнал ошибки ε(t) поступает на входы второго дифференциатора 19, четвертого усилителя 17 и вход сумматора 23, на другие входы которого поступают сигналы с выходов второго дифференциатора 19 и второго интегратора 18. Результирующий сигнал с выхода шестого сумматора 23 перемножается с сигналом u(t) во втором блоке умножения 20, сигнал с выхода которого через усилитель 21 поступает на вход сумматора 5. Тем самым производится во времени подстройка коэффициента n22 таким образом, чтобы ε(t) стремилась к нулю.
Таким образом, технический эффект от использования системы управления заключается в улучшении качества переходного процесса, повышении быстродействия и времени переходного процесса. Достигается это путем регулирования положения нуля системы на плоскости корней (а не уничтожения нуля объекта управления).
Изобретательский уровень предложенного технического решения подтверждается отличительной частью формулы изобретения.
Источники информации
1. Боднер В.А. Теория автоматического управления полетом. - М.: Наука, 1964, с.85 (прототип).
2. Петров Б.Н., Рутковский В.Ю., Земляков С.Д. Адаптивное координатно-параметрическое управление нестационарными объектами. - М.: Наука, 1980.
3. Лащев А.Я. Синтез модельного управления. Материалы докладов IX Всероссийской НТК «Повышение эффективности средств обработки информации на базе математического моделирования» 2.II. - Тамбов. 2009. С.288-294.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПО УГЛУ ТАНГАЖА | 2009 |
|
RU2443602C2 |
| СПОСОБ ГРУБОГО УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ САМОЛЕТА И СИСТЕМА ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2587773C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379738C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ УПРАВЛЕНИЯ ПОДВИЖНОГО АППАРАТА | 2012 |
|
RU2493578C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1829279A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| ЭЛЕКТРОПРИВОД С АВТОМАТИЧЕСКОЙ ПОДСТРОЙКОЙ ЧАСТОТЫ ВХОДНОГО ГАРМОНИЧЕСКОГО СИГНАЛА | 2008 |
|
RU2399079C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379739C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2536365C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ | 2015 |
|
RU2605946C1 |
Изобретение относится к системам управления и может быть использовано в системах адаптивного управления углом тангажа самолета. Техническим результатом является улучшение качества переходного процесса и увеличение быстродействия. Система содержит задатчик угла тангажа, объект управления (самолет), датчик угла, датчик угловой скорости, эталонную модель, датчик параметра, задатчик параметра, шесть сумматоров, пять усилителей, два блока умножения, два интегратора, два дифференциатора, причем вторым сумматором, интегратором, блоком умножения, четвертым сумматором, датчиком параметра и задатчиком параметра образован фильтр с переменными параметрами. 1 ил.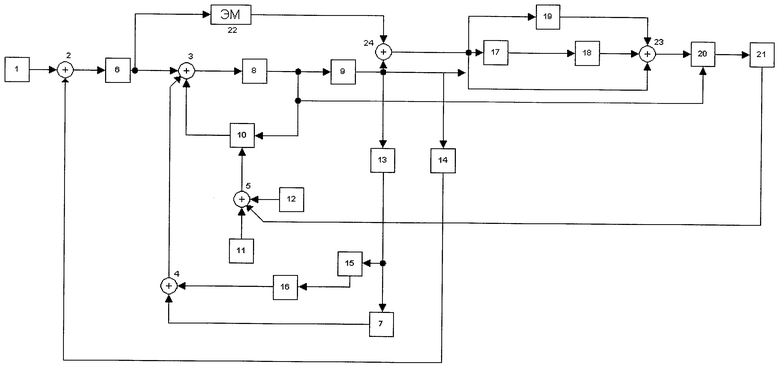
Система адаптивного управления самолетом по углу тангажа, содержащая по следовательно соединенные задатчик угла тангажа, первый сумматор, первый усилитель, второй сумматор, первый интегратор, объект управления (самолет) и датчик угла, выход которого соединен со вторым входом первого сумматора, выход объекта управления через последовательно соединенные датчик угловой скорости, первый дифференциатор второй усилитель и третий сумматор соединен со вторым входом второго сумматора, а выход датчика угловой скорости через третий усилитель подключен ко второму входу третьего сумматора, отличающаяся тем, что она содержит датчик параметра, задатчик параметра, два блока умножения, четвертый, пятый и шестой сумматоры, вторые интегратор и дифференциатор, эталонную модель, четвертый и пятый усилители, выход первого интегратора через первый блок умножения соединен с третьим входом второго сумматора, выход датчика параметра через четвертый сумматор подключен ко второму входу первого блока умножения, а выход задатчика параметра соединен со вторым входом четвертого сумматора, выход первого усилителя через последовательно соединенные эталонную модель, пятый сумматор, четвертый усилитель, второй интегратор, шестой сумматор, второй блок умножения и пятый усилитель соединен с третьим входом четвертого сумматора, вход второго дифференциатора соединен со вторым входом пятого сумматора, вход объекта управления соединен со вторым входом второго блока умножения, а выход через последовательно соединенные шестой сумматор и второй дифференциатор - с третьим входом пятого сумматора.
| УСТРОЙСТВО УПРАВЛЕНИЯ КАНАЛОМ ТАНГАЖА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2303805C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО ТАНГАЖУ | 2006 |
|
RU2351974C1 |
| US 2005065672 A1, 24.03.2005 | |||
| US 5979835 A, 09.11.1999 | |||
| US 5112009 A, 12.05.1992. | |||

