1
Изобретение относится к области автоматического управления и регулирования режимов работы тяговых асинхронных двигателей, в частности, частотноуправляемого тягового электропривода переменного тока с асинхронными тяговыми двигателями и автономными инверторами напряжения, предназначенного, например, для контактного н автономного электрического подвижного состава.
Известен способ генераторного торможения транспортных средств с частотно-регулируемыми асинхронными тяговыми двигателями при котором кинетическая энергия движущихся масс иреобразуется в электрическую н поступает в сеть при осуществлении рекуперации или рассеивается в тормозных резисторах. Известна система электропривода, в которой энергия, необходимая для обеспечения тормозящейся асинхронной машины намагничивающим током, потребляется от источника питания {. В этой системе в тормозных резисторах рассеивается энергия, поступающая от асинхронной машины, работающей в генераторном режиме, а также часть энергии, отдаваемой источником питания. Регулирование привода осуществляется с помощью отрицательной обратной связи по мощности источника питания. Для этого в звене постоянного тока преобразователя установлены датчики тока и напряжения. В тяговом режиме электропередачи регулирование мощности источника питания равноценно регулироваиию суммарной мощности, потребляемой асинхронными двигателями. Однако, при реостатном торможеиии такой способ регулирования не может обеспечить контроль мощности, развпваемой асинхронными машинами, работающими в генераторном .
Известно устройство для регулирования тормозиого момента асинхронной мащииы, содержащее преобразователь с явно выраженным звеном постоянного тока, датчик тока в этом звене, соединенный с регулятором частоты скольжения асинхронной мащины через промежуточный усилитель с несколькими входами {2.
Устройство позволяет регулировать тормозную мощность асинхронной машины, однако, при осуществлении генераторного реостатного
торможения оно не ограничивает величины мощности, потребляемой от источника пптания, что приводит к непроизводительному расходу энергии и завышению габаритной мощности тормозных резисторов. Устройство требует специального фуикциональиого блока, используемого только прп регулированпи тормозного режима привода.
С целью расширения диапазона регулирования тормозного момента асинхронной машины
без усложнения устройства и ограничении величины Mouj,HOCTH, потребляемой от источника питания в режиме реостатного тормол ения, с возможностью регулирования этой мощности, а также регулирования мощности, отдаваемой асинхронной машиной, работающей в режиме рекуперативного торможения, предлагаемое устройство снабжено источником регулирования напряжения, выход которого подключен ко входу промежуточного усилителя.
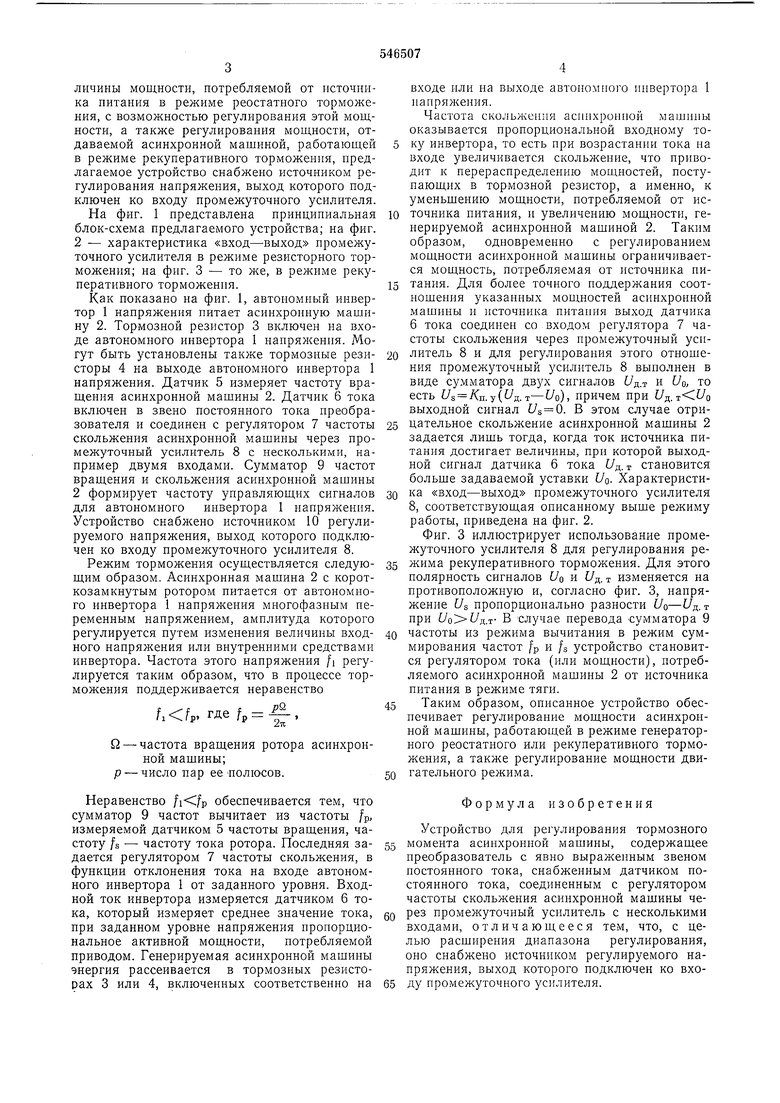
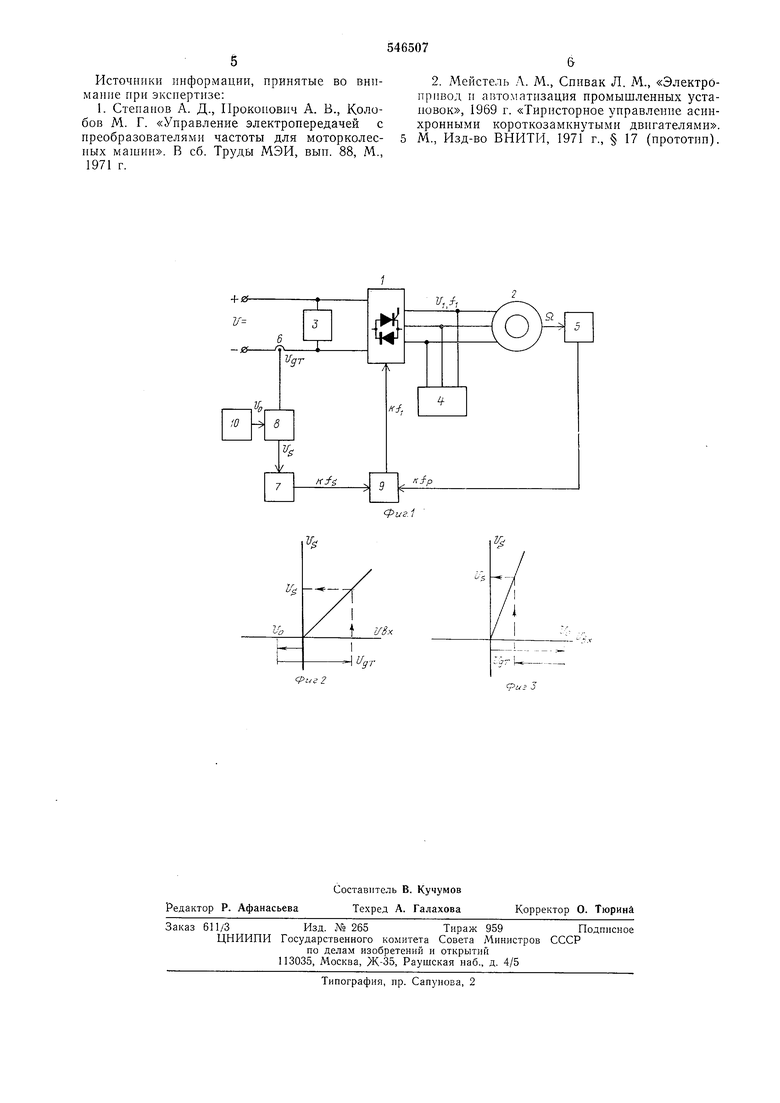
На фиг. 1 представлена принципиальная блок-схема предлагаемого устройства; на фиг. 2 - характеристика «вход-выход промежуточного усилителя в режиме резисторного торможения; на фиг. 3 - то же, в режиме рекуперативного торможенпя.
Как показано на фиг. 1, автономный инвертор 1 напряжения питает асинхроиную машину 2. Тормозной резистор 3 включен на входе автономного инвертора 1 напряжения. Могут быть установлены также тормозные резисторы 4 на выходе автономного инвертора 1 напряжения. Датчик 5 измеряет частоту вращения асинхронной машины 2. Датчик 6 тока включен в звено постоянного тока преобразователя и соединен с регулятором 7 частоты скольжения асинхронной машины через промежуточный усилитель 8 с несколькими, например двумя входами. Сумматор 9 частот вращения и скольжения асинхронной машины 2 формирует частоту управляющих сигналов для автономного инвертора 1 напряжения. Устройство снабжено источником 10 регулируемого напряжения, выход которого подключен ко входу промежуточного усилителя 8.
Режим торможения осуществляется следующим образом. Асинхронная машина 2 с короткозамкнутым ротором питается от автономного инвертора 1 напряжения многофазным иеременным напряжением, амплитуда которого регулируется путем измеиения величины входного напряжения или внутренними средствами инвертора. Частота этого напряжения /i регулируется таким образом, что в процессе торможения поддерживается неравенство
f,fp, гдеГр.
Q
частота вращения ротора асинхронной машины; р - число пар ее лолюсов.
Неравенство обеспечивается тем, что сумматор 9 частот вычитает из частоты fp, измеряемой датчиком 5 частоты вращения, частоту /S - частоту тока ротора. Последняя задается регулятором 7 частоты скольжения, в функции отклонения тока на входе автономного инвертора 1 от заданного уровня. Входной ток инвертора измеряется датчиком 6 тока, который измеряет среднее значение тока, при заданном уровне напряжения пропорциональное активной мощности, потребляемой приводом. Генерируемая асинхронной мащины энергия рассеивается в тормозных резисторах 3 или 4, включенных соответственно на
входе или на выходе автономного инвертора 1 напряжения.
Частота скольжения асипхронпой машипы оказывается пропорциональной входному току инвертора, то есть при возрастании тока на входе увеличивается скольжение, что приводит к перераспределению мощностей, поступающих в тормозной резистор, а именно, к уменьшению мощности, потребляемой от источника питания, и увеличению мощности, генерируемой асинхронной машиной 2. Таким образом, одновременно с регулированием мощности асинхронной машины ограничивается мощность, потребляемая от источника иитания. Для более точного поддержания соотношения указанных мопшостей асиихронной машины и источника питапия выход датчика 6 тока соединен со входом регулятора 7 частоты скольжения через промежуточный усилитель 8 и для регулирования этого отношения промежуточный усилитель 8 выполнен в виде сумматора двух сигналов (Уд.т и U, то есть t/s /(n..т-t/o), причем при Uy..i.Uo выходной сигнал t/s 0. В этом случае отрицательное скольжение асинхронной машины 2 задается лишь тогда, когда ток источника питания достигает величины, при которой выходной сигнал датчика 6 тока t/д. т становится больше задаваемой уставки f/o. Характеристика «вход-выход промежуточного усилителя 8, соответствующая описанному выше режиму работы, приведена на фиг. 2.
Фиг. 3 иллюстрирует использование промежуточного усилителя 8 для регулирования режима рекуперативного торможения. Для этого полярность сигналов UQ и Уд. т изменяется на противоположную и, согласно фиг. 3, наиряжение Us пропорционально разности f/o-t/д. т при .т- В Случае перевода сумматора 9
частоты из режима вычитания в режим суммирования частот fp и /3 устройство становится регулятором тока (или мощности), потребляемого асинхронной машины 2 от источника питания в режиме тяги.
Таким образом, описанное устройство обеспечивает регулирование мощности асинхронной машины, работающей в режиме генераторного реостатного или рекуперативного торможения, а также регулирование мощности двигательного режима.
Формула изобретения
Устройство для регулирования тормозного момента асинхронной машины, содержащее преобразователь с явно выраженным звеном постоянного тока, снабженным датчиком постоянного тока, соединенным с регулятором частоты скольжения асинхронной машины через промежуточный усилитель с несколькими входами, отличающееся тем, что, с целью расширения диапазона регулирования, оно снабжено источником регулируемого напряжения, выход которого подключен ко входу промежуточного усилителя.
Источники информации, принятые во внимание при эксиертизе:
I. Степанов А. Д., Прокопович А. В., Колобов М. Г. «Управление электропередачей с преобразователями частоты для моторколесиых машин. В сб. Труды МЭИ, вып. 88, М., 1971 г.
2. Мейстель А. М., Спивак Л. М., «Электропривод и автоматизация промышленных установок, 1969 г. «Тиристорное управление асинхронными короткозамкнутыми двигателями. М., Изд-во ВНИТИ, 1971 г., § 17 (прототип).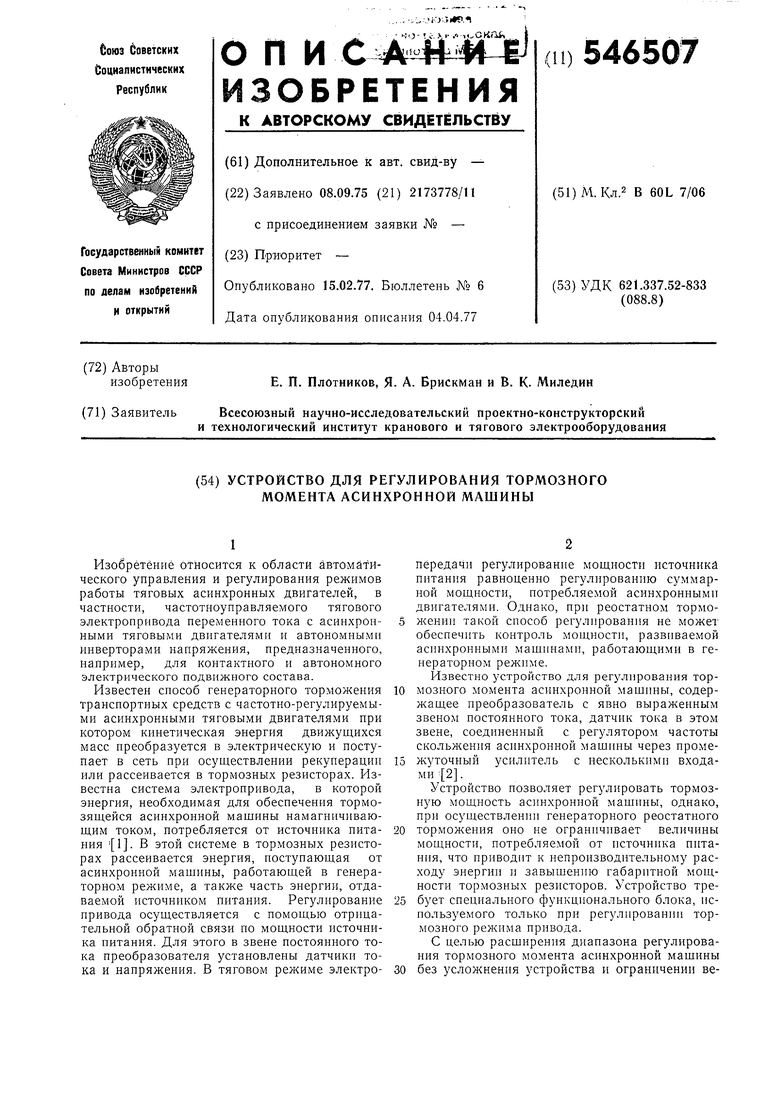
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования тормозного режима асинхронного тягового электропривода | 1974 |
|
SU506528A1 |
| Устройство устранения автоколебаний системы автономный инверторасинхронный двигатель | 1973 |
|
SU535704A1 |
| АСИНХРОННЫЙ ТЯГОВЫЙ ПРИВОД ЭЛЕКТРОПОЕЗДА | 2004 |
|
RU2299512C2 |
| Устройство для торможения трехфазного асинхронного электродвигателя | 1981 |
|
SU974531A1 |
| Преобразователь тяговый локомотива | 2019 |
|
RU2732816C1 |
| Способ устранения автоколебаний асинхронного двигателя | 1974 |
|
SU532167A1 |
| СПОСОБ ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКО-ТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2462603C2 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1972 |
|
SU1840123A1 |
| СПОСОБ СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385531C1 |
i/gx
