Изобретение относится к области электротехни ки и может быть использовано, например, в частот но-регулируемых приводах. При питании acmixpoHHoro двигателя от автономных инверторов с конденсаторной коммутацией возможно его самовозбуждение, которое приводит к появлению в системе инвертор-двигатель относительно низкочастотных качаний, прояв ляющихся в виде периодического изменения величины тока, напряжения, скорости асинхршшого двигателя. Известен способ устранения автоколебаний асинхронного двигателя, питаемого от преобразователя частоты с явновыражениым звеном постоя ного тока, путем шунтирования входль1х зажимов параллельного инвертора стабяпизирующей Р|,С -цепочкой. Емкость разделительного конденсатора долж на быть достаточно большой и определяется соотношением- - -;г- 0,2 В,гз котором 211 inC R - где R, сопротизлеяие шунгирующего резистора;Р - ком1™ал|1нач мопшостъ двигателя; С - емкость разделительного конденсатора;и - л П{ейное выходное напряжение инвертора. Таким образом, подключение ш П1тиру П1ней R С -цепочки понводит к вел15чению усгановjiCHHoff мощности электрооборудования преобразовате;;я и потерь, что при значительной мощности преобразователя неприемлемо. Известен также способ устранения автоколебаний асинхронного двигателя при питании от dBTono.Miioro преобразователя с явновыраженным 3t5eiiOM постоянного тока подачи в систему регулирования дополнительного сигнала. Однако для реализации этого способа треб ется выделение реактивного тока преобразовате; я, гго сравнительно просто осуществить в инверторах напряження, имеюихих обратные диоды для свободного обмена энергией асинхронного двигагел.ч с емкостью фильтра преобразователя и в цепи которых протекает только реактивный ток, В инве;гторах тока обратные диоды отсутствуют, поэтому л них принщтиалыго кевоз3
можно вылеяшь реактивнун) сосгавляющую тока нвшагеля.
.яиболие близким к изоб|)етеиик) по технической c}iiUi iCTH является способ устранения автоколебаний асинхронного лвтатедя, питаемого от преобразователя частоты с явиовыраженным «веном постоянного тока, путем нодачи в ciCTCMy .1рона тия дополнительного сигнала, воздсн стн)-ю1цего на цепь управле.ния частотой преобразователя.
Прпмоггенис такого способа в инверторах тока невозможно. того, для реализации указанного способа в 1 рсобразователе необходимо устана. до1 5;1нительио два устройства: устройство ;1ля выделения реакгивното тока (д.атчик Кактивного юка) и устройство .ьчя взятия производной теактивног о тока. Это ириво.лит к ус.чожиснию частотного электропривода.
1ель изобрегения распирение области при менения сгзособа (ьапри.мер, в инверторах тока) и упрО|ц(иие э.чектропривода.
Эго ;1остигается тем, что в час гогно-регулируемом электроириподе, содержащем асинхронный двигатель, автономный и}{вертор с системой упраиления, управляемый выпрямитель с системой управления, датчики тока и 3j,C двигателя и задатчик интенсивности пуЬкя и торможения двигате.ля, в систему чту-тирования подан) дополи.г:е. сиг)ал, получаемый ка разность между сигнгшом задания на частоту и сигналом .тагчика ЭЛС асшгхронного двИ1-ате/ я, в такой полярности, нри разгоне acHjixpoHHoio двигателя с уменьшением ЭДС Н1 1ходная частота преобразователя уме ыпается а при торможении-увеличивается, при этом скольжение асинхронного двигатсля не должно превьпиать критическое.
Таким образом, в динамических режимах сохраняется принятый закон регу; 1роваиия соотношения между частотой и ЭДС хшигателя.
Выходное напряжение автономного инвертора тока oBpaTiio пропорционально коэффициенту мощности суммарной Haj рузки преобразователя к связано с напряжением звена постояннего тока формулой
i-MtJU
-сояЧ „ , а it.2-.
где и, - среднее значение напряжения на зажимах ностоянного тока инвертора;cos коэффигшепт мопаюсти суммарно
нагрузки преобразователя. Koэффv щ eнт мощности асинхронного двигателя зависит от частоты преобразовате/1я и нагрузочного момента, и д.ажс фи фиксировалнйй частоте работа системы с Uj - const невозможна, поскольку при любом изменении нагрузочного MOMeiiTa напряжение на зажимах
74
ДВИ1а1еля меняется. Полому (1хол.им11 ноддерживагь напряжение на зажимах асинхронного двигателя при помощи сисгемы anroMaiH4ef КОК) pei улирования, воздейсгвуклией на сисге му упр/авления выпрямителя. (..riejioBaie.n.Ho. в самой структу(Х;; системы регулирп ания, обсспечиваюп1ей закон регулировании - const, имеется регулятор ЭДС и .чатчик ЭДС, необходимьн не только .гьля оптимизации характеристик дви ателя, но также лчя (обеспечения возможности работы автономного инвертора тока на двига1ельную нагрузку:
а коэф(|)И1шенг, определяемый отноп1ением С
i
где t - з(гачение частоты;
f)-, - номиншгьное значение частотг.1; F, ЭДС двигателя - условное напряжение в контуре намагничивания. 1олому никаких /юнолните.чьных датчиков для реа.чизации преш1агаемого сггособа не требуется.
Асинх|К)Нный двигатель, питаемый от автономно о инвертора с конденсаторной коммутацией, может одновременно начать работать в режиме асинхронного генератора с конденсаторным возбуждением, если в соответствующей схеме замеп1ения вьнюлняются условия самовозбуж,1ения на какой-либо частоте. При зтом часть энергий, получаемой двигателем от инвертора
на рабочей частоте последнего, передается через общий вал генератору и отдается им на частоте самовозбуждения обратно в схему инвертора. Поскольку токи этих двух частот, весь.ма близких по вeJЧичинe, протекают в одной и той же цени, то в резу.льтате их 1галоже1гия и возникают автоколебания. Обычно указагп1ые автоколебания возникают в динамических режимах и нри различных возмуп1ениях.
При переходе двигателя в генераторгп,гй режим его скольжение меняет свой знак. При этом .меняется фазовый угол нагрузки с-.
В двигательном режиме s больгце нуля и меньше 90 эл. град., в генераторном режиме f больпле 90 и меньп1е 180 эл. Град. При переходе из двигательного режима в генераторный знак среднего напряжения на зажимах постоянного тока инвертора меняется на противоположный, т.е. инвертор как элемент цепи ностоянного тока не оказывает сопротивления току, а снособствует его протеканию. Увеличен.ие тока в звене постоянною тока приводит к увеличению ЭДС двигателя.
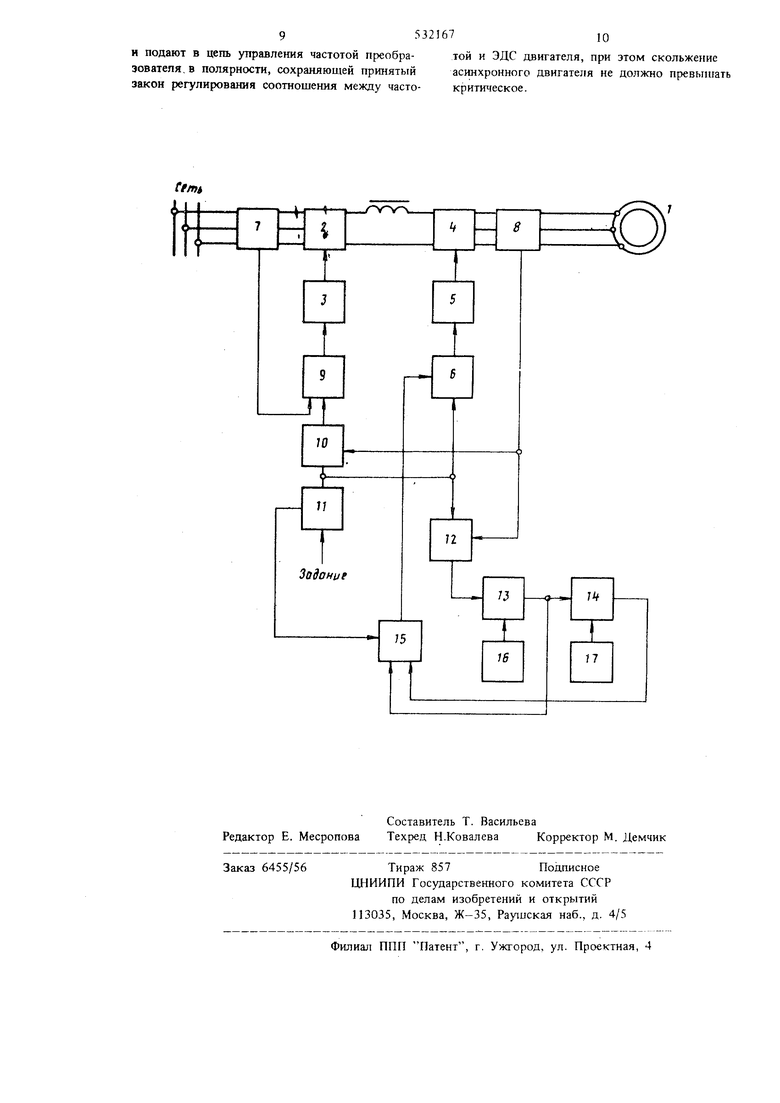
По предлагаемому способу разностный сигнал, воздействуя на систему регулироЕ ания частоты при нуске асинхронного двигателя, увеличивает частоту преобразователя и работа асинхронного двигателя в генераторном режимс ii|HK(iiiniu я. Mio 11ск;|||)ч;|с1 ляльиейшук) раскачку ICMI-.I. (чли iipejii.iaHnUi паление напряжения на зквипалешном сипрсшвлеиии Zj на вых)ле авюиомнок) ииве() г(1ка и РИЛС cniiycciилалыюй ЗД( . то схема авгоиомного инвертора тока при раГютс на асинхронный яви -ате;п1 аналогична схеме :)ависим()го ииверк ра, рабоrasiMiero на сеть бесконечной мощности с нагфяжением U,, , причем в анояиые кепи npeofi разователя включены иниуктивност L , и сопротипление R . (инус()ида;н ная составляю1 1ая выхо/шого нанряжеиия определяется как и - 3о 1 1 П /l . „ rN с к 2,Л4Я,(КС,005 1 где и лнапряжение па выходе звена ноСТОЯ1П10ГО г ока инвертора тока; RI - активное сопротивление обмотки статора. 1оскольку полное сопротивление jaMeinenного ротора аси}{хроннс)Г() двигателя о ||1еделяе ся формулой 2 S где R, приведенное активное сопротивлени ротора; Xjприведенное индуктивное сопротив ление ротора acHHXpofiHoro двигаге ля; Sотносительное скольжение асинхрон ного двигателя, то, если при за;1анпом токе дви1ателя (ограни ченном величиной токоограничения регулятора тока) нри разгоне двигателя асинхронный дви гатель не успевает разгоняться вследствие боль ших маховых масс иди быстрого темпа )аз1 (v на, скольжение двигателя увеличивается, что приводит к умепыпепию полного сопр(пивления ротора, а ;ио. в свою очередь, вследствие уменьнюния эквивалентного сопротивления дви гателя Z, приводит к умер)ьп1ению ет;) ЭДС. Уменьигение ЭДС лви ателя в соответствии с пре/июженным способом приводит к появлению сигнал рассогласования. возде 1С1в iDinero на канаит рег)лирс)вания частоты так, что уменьпш ется выходная частота инвертора, темп locia которой онределяется сигншюм задания на ходе задагчика интенсивности. Аналогично система ведет себя в с.зучас уве личения скольжения нри автоколебаниях. При увеличении скольжения уменьuiacT частоту преобразователя, устраняя .дальнейшую раскачку системы aвтoн(lH,lи инвергор-;1ВИ1атель. Величину дополнитель И)ГО сигнала, подаваемого в систему регулирования часгоки преобразователя, необходимо ог|);и1ичиг1, па orspeчо,ч;нном ровне я я кч о. чтобы при подачо ег II часюта не чмепь-пилась (и.зи не увеличилась) насто.чько. что скольжение двигаге.чя не П 1свысил(1 критическч1е. При тормсгжении асинхронного двитатсля, нескольку скольжение двигателя ме(яет свой знак (.ШИ1а1ель работает генератором), дополнительный СИ1 пал необхо.димо подавать в сисге.му регулирования частотой в обратгю1г полярности. В с.лучае быстрою спала частоты или (пкжачки системы скольжен15е дви1 ателя может превысить критическое, что ггриводит к pe3KONfy уменьн е п ю зкв1 валентного соиротив:геиия и соответственно ЭДС двигателя. В этом случае ;и1я устранения автоколебаний и п;хдотврагиения срыва горхюжепдя пеобход - nojibicirn, выхо.ип)к) частоту инвертора, т.е. ранее г одаваемый сигнал nojiaib г, день pei ул1 ропанг,я ча ,оты в обраиктй полярности. Па чертеже показана схема одного irs возможных устроГютв. рса.дпзуюних пре,и1ожс1ичь,й способ. Система частстюго злсктроприиодп COCTJI-;T из асинх 1онно1 о двигате.ля . .пясмо1 о вьтря.м1ггеля с системой . фазоихп1у;Г.сно1о унравления. aBToHONntoro инвертора 4 тока с системой 5 управдегия. зндагопктс rencj aTopa ft, .датчиков тока, .датчиков 8 ЭДС .ныгаге.ия, двухкоптурпой систем;,i подчинепного ;чч улировапия. осуп1ествляюп1ей рег Л1-1рование naiipnжения на двитате.чя и частоты в соответствии с законо.м ----ccnc,t и-иклкчаюс;ей регулягор Ч тока, регчмятор 1(1 ЭДС двигате.ля и з игатчик П иптепспвносги пуска п Т1.))жения . . текупее значение частоты двигателя, - поминальное значение частои, двнt:- ЭДС двигате.лч. оп)еде.-1яемзя как напряжение, условно прк.лпжегиюе к намагничивающему кс нтуру маМеж.ч} выходом .цзти ка ЭДС и выходом задатчика 1 I И гтенсинг ости пуска и торможения .:1.вигателя включен n3NTepHTe.b - рассог.часования сигнала, на выходе которого п vcraновивн1емся режиме постоян1 ая состав.пяницая вьгходного сигнала равна нулю. Г ост ольку задаг-оио-дг ге).ератор 6, система 3 фазоимпульсного управ.ленпя вьпгрямите.лем 2 и .датчик Я ЭДС иглсмт линейные характеристики, настроегпгый в одной точке измеритель 12 рассогласование дает пост(1яяпугя ссотавляющую выходного сигна.ла. равную ну-.лн в у.таиопившемся режиме во всем диапазоне регулировани частоты и напряженкя. Таким образом, на вы ходе измерителя 12 рассогласования в установившемся режиме во всем диапазоне регулиро вания частоты и 1 апряжения имеются только небольшие высокочастотные пульсации, составляющие несколько процентов от полезного сиг нала, которь е фильтруются фильтрами усилите лей 13 и 14. Поэтому в установившемся режи ме выхо;хной сигнал с логического устройства 15 равен (улю и никакого дополргнтельного воздействия на задающий генератор 6 не оказывает. Кго выходная частота определяется только вхояиым сигналом, величина которого задается задатчиком 11 интенсивности. При пуске асинхронного даигателя на выходе задатчика 11 интенсивности напряжение нарастает во времени по линейному закону с необходимым темпом. Выходной сигнал задатчика 11 интенсивности подается lui входы регулятора 10 ЭДС двигателя и задающего генератора 6. Начинается разгон асинхронного двигателя. При нарастзлии сигнала задатчика 11 интенсивКОСТИ его промежуточный сшнал (производная частоты) равен нулю и логическое устройство .5 переключено так, что усили тель 14 заблокирован, а дополнительный сигнал в за даюший генератор подается с выхода усилителя 13. При возникновении автоколебаний двигатель переходит в генераторный режим, напряжение на его зажимах возрастает вследствие увеличения тока, cHrii;L4 с датчика ЭДС двигателя кревьппает сигнал задания, снимаемый с задатгака интенсивности и на выходе измерителя 12 рассогласования появляется дополнительный cnriiaji такой полярности, что при подаче его в задающий генератор 6 выходная частота его увел}«ивается. Это предотвращает работу асинх юпного ДБИгателя в генераторном режи.ме и дальнеЙ1 ;ую раскачку системы инвертор- двигатель. Если ротор двигателя при разгоне отстает от магнитного поля двигателя, то скольжение его увеличивается, что приводит к уменьшению эквивалентного сопротивления Z двигателя и напряжения на его зажимах и снижению сигнала дагшка ,ЭДС двигателя. В зтом случае на выходе измерителя рассогласования появляется дополнительный сигнал, который уменьшает частоту задающего генератора, что задерживает ее рост и предотвращает дальнейшее увеличение ско ьжения даигателя, превышение которым критической величины приводит к срыву частотного пуска асинхронного двигателя, а также оказывает демпфируюп1;ее влияние, предотвращая раскачку системы асинхроннь Й двигатель-инвертор. При торможении асинхронного двигателя скольжение Mefwei знак и двигатель работает в генераторном режиме. На промежуточном выходе задатчика интенсивности появляется сигнал Si, который переключает логическое устройство 15 так, что выходной сигнал усилителя 13, подаваемый в задаюпшй генератор 6, блокируется, а дополнительный сигнал подается в усилитель 14, где знак его инвертируется, и затем поступает в задаюпщй генератор. Теперь в случае быстрого торможения двигателя, если его скольжение увеличивается (двигатель не успевает тормозиться при заданной величине тока), на выходе усилителя 14 появляется сигнал обратной полярности, который приводит к увеличению частоты задающего генератора, что уменьшает величину скольжения и предотвращает раскачку системы двигатель - инвертор, а также срыв рекуперативного торможения вследствие превыщения скольжением критической величины. Величина дополнительного сигнала, подаваемого в задающий генератор, составляет несколько процентов от величины сигнала задания с выхода задатчика интенсивности. Для этого параллелыго усилителям 13 и 14 подключены устройства 16 и 17 ограничения. Предаагаемый способ устра1 ения автоколебаний асинхронного двигателя позволяет расширить область его применения, в частности в инверторах тока, где вследствие отсутствия обpanibix диодов-применение известного способа невозможно. Кроме того, для реализации нредложенного способа не требутатся какие-либо спепиальные устройства ппя выделения сигнала, подаваемого а задающий генератор в качестве корректирующею, что приводит к упрощению схемы по сравнению с известным способом, где необходимы устройство для измерения 1кактивно1-о тока и устройство для взятия производной реактивного тока, причем эти устройства используются только для выделения коррекшрующего сигнала. Формула изобретения Способ устранения автоколебаний асинхрон-. ного двигателя в динамических режимах, питаемого от преобразователя частоты с явновыраженным звеном постоянного тока, путем подачи в систему регулирования дополнительного сигнала, отличающийся тем, что, с целью расширения области применения (например, в tfflBepTopax тока) и упрощения 3jieKTponpHBOда, дополнительный сигнал получают как разность между сигналом задания на частоту и сигналом датчика ЭДС асинхронного двигателя
и подают в цепь управления частотой преобраэоватепя, в полярности, сохраняющей принятый закон регулирования соотношения между часто
53216710
той и ЭДС двигателя, при этом скольжение асинхронного двигателя не должно превьгн1ать критическое.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для двухзонного регулирования асинхронного электродвигателя | 1976 |
|
SU752721A1 |
| Способ устранения автоколебаний асинхронного двигателя | 1976 |
|
SU702477A2 |
| Устройство для управления асинхронным электродвигателем | 1979 |
|
SU864479A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1978 |
|
SU741399A1 |
| Способ реверса асинхронного электродвигателя и устройство для его осуществления | 1980 |
|
SU970620A1 |
| Частотно-регулируемый электропривод | 1987 |
|
SU1434530A1 |
| Асинхронный частотно-регулируемыйэлЕКТРОпРиВОд | 1979 |
|
SU799094A1 |
| Преобразователь частоты для частотно-регулируемого электропривода | 1979 |
|
SU888321A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2331152C1 |
| Устройство для управления торможением частотно-регулируемого электропривода | 1984 |
|
SU1236593A1 |
