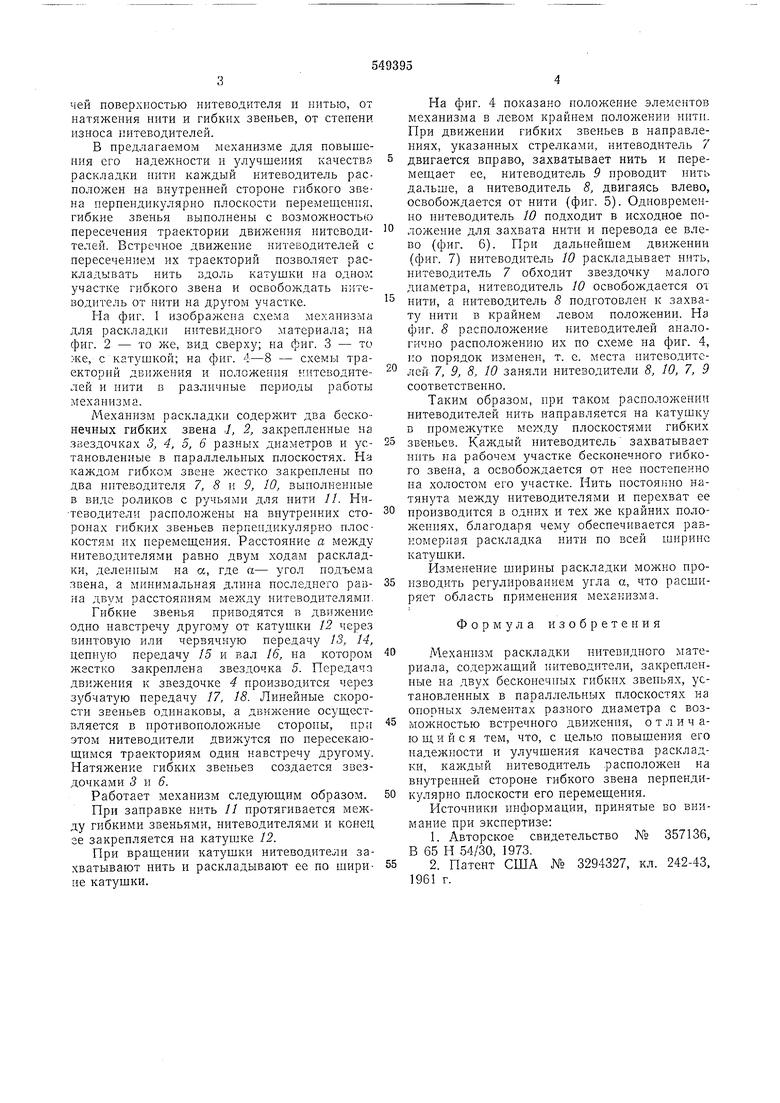
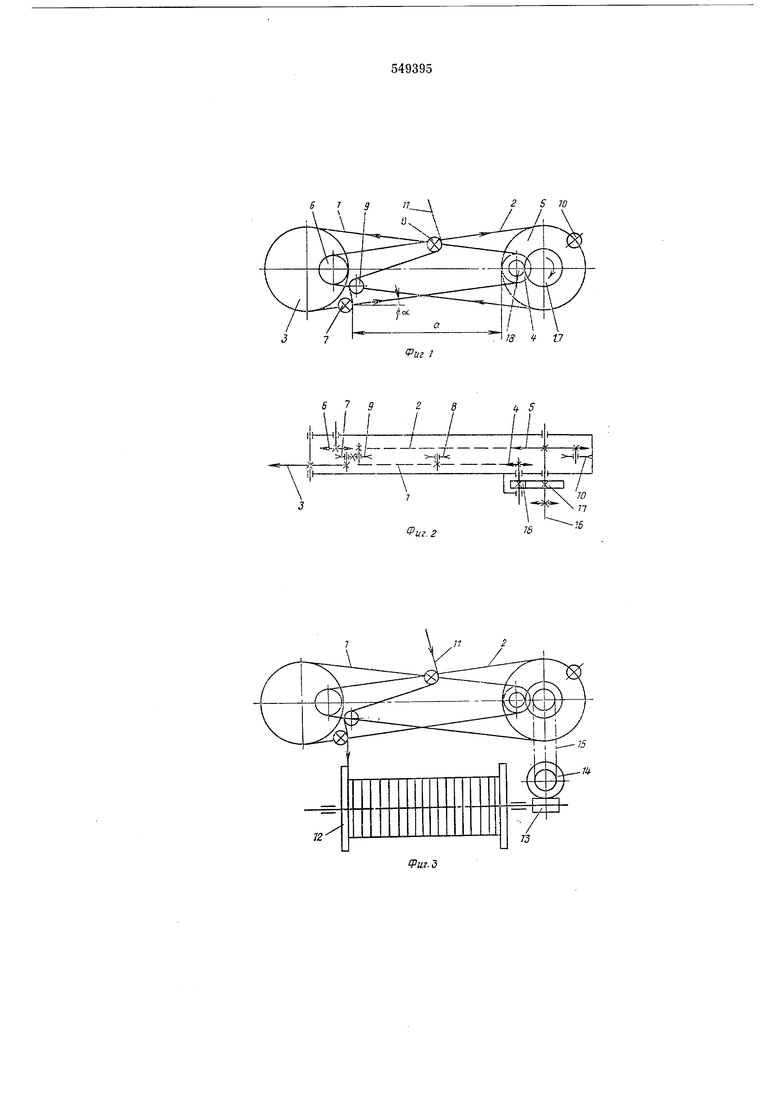
Изобретение относится к переработке нитевидных материалов, например проволочной продукции, вырабатываемой на предприятиях кабельной и метизной промышлепности при приеме ее после волочильных станов на катушки, а также для памотки нитей в текстильной промышленпости. Известен механизм для раскладки нитевидных материалов на катушки в намоточных аппаратах, содержаш,ий два бесконечных гибких звена, имеюш,их встречное движение. в которых на двуплечих рычагах шарнирно закреплены нитеводнтели. Гибкие звенья расположепы в параллельных плоскостях, и между звеньями имеются фигурные направляющие и упоры на звездочках для передачи нити от одного нитеводителя к другому пр.ч изменении направления раскладки нити. При таком исполнении механизма затруднительно производить передачу нити от одного нитеводителя к другому в одном постояпном крайнем положении, поскольку момент соскакивания нити с убирающегося нитеводителя не будет постоянным, так как он зависит от износа трундихся поверхностей, от коэффициента трения между нитью и нитеводителем. Кроме того, между нитеводнтелями необходим зазор в момеит передачи нити, из-за чего на краях катушки образуется неровная намотка. Прохождение нити на катушку производится из одной точки по линии, проходящей через середину ширины катушки. Нить послх; перехода от одного нитеводителя к другому не прижимается к нитеводителю, а отклоняется Б середину хода, что ухудшает качество раскладкн нити. того, область применения механизма ограничена, так как в нем невозможно произвести изменение ширины раскладки, и для каждого типа катущкк требуется замена механизма 1. Более близким к изобретению по технической сущности и достигаемому результату является механизм раскладки, в котором нитеводители закреплены на гибких звеньях в плоскости траектории движения последних или в параллельпых плоскостях. Гибкнс звенья установлены на опорных элементах разного диаметра с возможностью встречного движения. Плоскости движения гибких звеньев раеположены перпендикулярно направлению движения нити на катушку. При этом траектории движения вершины нитеводителей меняются в зависимости от величины натяжения бесконечных гибких звеньев и наматываемой нити 2. В результате не обеспечивается получение качественной раскладки нити на катушку в крайних положениях из-за неодинакового момента соскальзывания ннти с нитеводителя, так как это зависит от коэффициента трения между рабочей поверхностью нитеводителя и нитью, от натяжения нити и гибких звеньев, от стенени износа нитеводителей. В предлагаемом механизме для повышения его надежности и улучшения качеств раскладки нити каждый китеводитель расположен на внутренней стороне гибкого звена перпендикулярно плоскости перемешения, гибкие звенья выполнены с возможностью пересечения траектории движения нитеводителей. Встречное движение нитеводителей с пересечением их траекторий позволяет раскладывать нить вдоль катушки на однод: участке гибкого звена и освобождать ннтеводитель от нити на другом участке. На фиг. 1 изображена схема механизма для раскладки нитевидного материала; на фиг. 2 - то же, вид сверху; на фиг. 3 - то :-ке, с катушкой; на фиг. 4-8 - схемы траекторий движения и положения нитеводителей и нити в различные периоды работы механизма. Механизм раскладки содержит два бесконечных гибких звена ,/, 2, закрепленные на звездочках 5, 4, о, 6 разных диаметров и установленные в параллельпых плоскостях. На каждом гибком звене жестко закреплены по два ннтеводителя 7, 8 и Я Ю, выполненные в виде роликов с ручьями для нити //. Нитеводители расположены на внутренних сторонах гибких звеньев перпендикулярно плоскостям их перемеш,ения. Расстояние а между нитеводителягли равно двум ходам раскладки, деленным на а, где а- угол подъема звена, а минимальная длина последнего равна двум расстояниям между нитеводителямп. Гибкие звенья приводятся в движение одно навстречу другому от катушки 12 через винтовую или червячную передачу 13, 14, ценную передачу 15 и вал 16, на котором жестко закреплена звездочка 5. Передача движения к звездочке 4 производится через зубчатую передачу 17, 18. Линейные скорости звеньев одинаковы, а движение осушествляется в нротивоположные стороны, при этом нитеводители движутся по пересекаюшнмся траекториям один навстречу другому. Натяжение гибких звеньев создается звездочками 3 и 6. Работает механизм следуюш,им образол. При заправке нить // протягивается между гибкими звеньями, нитеводителями и конец ее закрепляется на катушке 12. При врашении катушки нитеводители захватывают нить и раскладывают ее по ширине катушки. На фиг. 4 показано положение элементов механизма в левом крайнем положении нити. При движении гибких звеньев в направлениях, указанных стрелками, нитеводитель 7 двигается вправо, захватывает нить и перемещает ее, нитеводитель 9 проводит ннть дальше, а нитеводитель 5, двигаясь влево, освобождается от нити (фиг. 5). Одиовременно ннтеводитель 10 подходит в исходное положение для захвата нити и перевода ее влево (фиг. 6). При дальнейшем движении (фиг. 7) нитеводитель 10 раскладывает нить, ннтеводитель 7 обходит звездочку малого диаметра, нитеводитель 10 освобождается от нити, а нитеводнтель 8 подготовлен к захвату нити в крайнем левом положении. На фиг. 8 расположение нитеводителей аналогично расположению их по схеме на фиг. 4, но порядок изменен, т. е. места нитеводнтелей 7, 9, 8, 10 заняли ннтеводители 8, 10, 7, 9 соответственно. Таким образом, при таком расположении нитеводителей нить направляется на катушку в промежутке между плоскостями гибких звеньев. Каждый ннтеводитель захватывает нить на рабочем участке бесконечного гибкого звена, а освобождается от нее ностененно на холостом его участке. Нить ностоя ;но натянута между нитеводителями и перехват ее производится в одних и тех же крайних положениях, благодаря чему обеспечивается равномерная раскладка нити но всей ширине катушкн. Изменение ширины раскладки можно производить регулированием угла а, что расширяет область применения механизма. Формула изобретения Механизм раскладки нитевидного материала, содержаший нитеводнтелн, закрепленные на двух бесконечных гибких звеньях, установленных в параллельных плоскостях на опорных элементах разного диаметра с возможностью встречного движения, отличающийся тем, что, с целью повышения его надежности и улучшения качества раскладки, каждый нитеводитель расположен на внутренней стороне гибкого звена перпендикулярно плоскости его перемещения. Псточники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство № 357136, В 65 Н 54/30, 1973. 2.Патент США № 3294327, кл. 242-43, 1961 г.
6 1 9t
2 5 Ю
18 t V
| название | год | авторы | номер документа |
|---|---|---|---|
| Раскладчик нити | 1990 |
|
SU1726346A1 |
| МЕХАНИЗМ РАСКЛАДКИ НИТЕВИДНОГО МАТЕРИАЛА | 1972 |
|
SU358242A1 |
| Устройство для намотки нити | 1973 |
|
SU503805A1 |
| Механизм раскладки нити | 1985 |
|
SU1263604A1 |
| Механизм раскладки нитевидногоМАТЕРиАлА HA СЕРдЕчНиКЕ | 1979 |
|
SU844531A1 |
| УСТРОЙСТВО ДЛЯ РАСКЛАДКИ НИТИ | 1973 |
|
SU391983A1 |
| Устройство для закрепления материала на сердечнике мотальной машины | 1978 |
|
SU981167A1 |
| Механизм раскладки нити | 1991 |
|
SU1785982A1 |
| МЕХАНИЗМ РАСКЛАДКИ НИТИ==v r^i -v-t>&' i' тfs\^mi^^-4Q(\^yT^f'''-t-ifte..- V- -V.t-. : ^- | 1971 |
|
SU307961A1 |
| Устройство для намотки нитевидного материала | 1985 |
|
SU1284921A1 |
6 928fy 5
12
;з
5
W
Фаг. 7
7(7
иг.а
