1
Изобретение относится к области измерительной техники, предназначено для дистанционного контроля углов разворота объектов и может найти применение, например, при контроле величины деформаций самолетов, судов и т. п. во время их сборки и эксплуатации, при согласовании нулевых положений установленных на одном объекте астронавигационных приборов.
Известно устройство для контроля углов разворота объекта, содержащее источник поляризованного света, анализатор, фотоприемник, детектор, блок сравнения и регистрации.
В устройстве используется свойство поляризованного света значительно изменять коэффициент прохождения через анализатор при изменении углов, близких к 45°. В этом устройстве через анализатор попеременно пропускаются два пучка света, плоскости поляризации которых наклонены под 45° в разные стороны. Ирошедший поток направляется на фотоусилитель, сигналы синхронно детектируются и сравниваются. В случае неравенства сигналов приемная часть разворачивается (вручную или следящим приводом) до их уравнивания, а угол разворота определяется по шкале или иным способом.
Недостатки устройства с поляризованным светом являются: значительное влияние колебаний температуры и питающего напряжения
2
на результаты измерений, что снижает точность контроля и низкие производительность и точность контроля, вызванная тем, что устройство не имеет датчиков-преобразователей
для дистанционной передачи измерений.
Наиболее близким техническим решением к предлагаемому изобретению является устройства для дистанционного контроля углов разворота объекта, содержащее основание,
установленный на нем управляющий блок, выполненный в виде фотоэлектрического автоколлиматора, в фокальной плоскости которого расположена крестообразная крышевидная призма с притупленными ребрами, за которой установлен конденсор и фотоприемник, и отражающий блок, располонсенный на объекте и выполненный в виде объектива и установленного за ним зеркального отражателя. Четыре грани призмы подсвечиваются четырьмя импульсными лампами, читаемыми лмпульсами тока одной частоты с различным сдвигом фаз и большой скважностью. Если ось отражающей пирамиды и ее грани параллельны оси автоколлиматора и граням крышевидной
призмы, то автоколлимационные изображения подсвеченных граней совмещены с ними же, и отраженный поток на фотоприемник не проходит. Если же пирамида наклонена относительно горизонтальных осей или развернута
вокруг оси автоколлиматора, то изображения
подсвеченных граней смещаются, и ФЭУ через притупленные ребра попадает часть отраженного нпрамндой потока, нронорцнопальная сумме углов наклонов: и разаорота. Олределенпе составляющих по велпчр1пе п знаку производится с помощью сложной электронной системы выделения соответствующих сигналов.
К существенным недостаткам устройства относятся: невысокая точность контроля, вызванная тем, что ввиду большого числа возможных комбинаций, составляющих по величине и знаку практически невозможно независимое и точное получение сигпала по каждой составляющей, и малость линейных перемещений границы засвеченных граней при разворотах и наклонах отражающей части, определяемая требованием, чтобы длина ребер крыщевидной призмы давала пучки лучей, укладывающиеся в поперечный размер пирамиды.
Кроме того, для передачи информации в ЭВМ с целью повышения производительности измерений в устройство необходимо введение датчика преобразователя.
С целью повышения точности и производительности контроля управляющий блок данного устройства выполпеп в виде двух разнесенных один относительно другого точечных источников света, распололтенных в фокальной плоскости объектива, вращающегося цилиндрического модулятора с нанесенными на нем спиралями разного направления утла подъема и круговой шкалой, установленного так, что ось его вращения пернепдикулярпа оптической оси объектива, двух разнесенных один относительного другого фотоприемииков установленных в фокальной плоскости объектива, каждый соответственно над источником света и расположенных с внутренней стороны модулятора за его спиралями, дополнительных источников света и фотоприемника, установленных один напротив другого по разпые стороны модулятора в плоскости его круговой шкалы, блоков регистрации, соединенных с выходами фотоприемников и блоков обработки сигналов с фотопрпемпиков. Кроме того, для измерения углов по трем координатам центральная часть объектива выполнена в виде плоского зеркала.
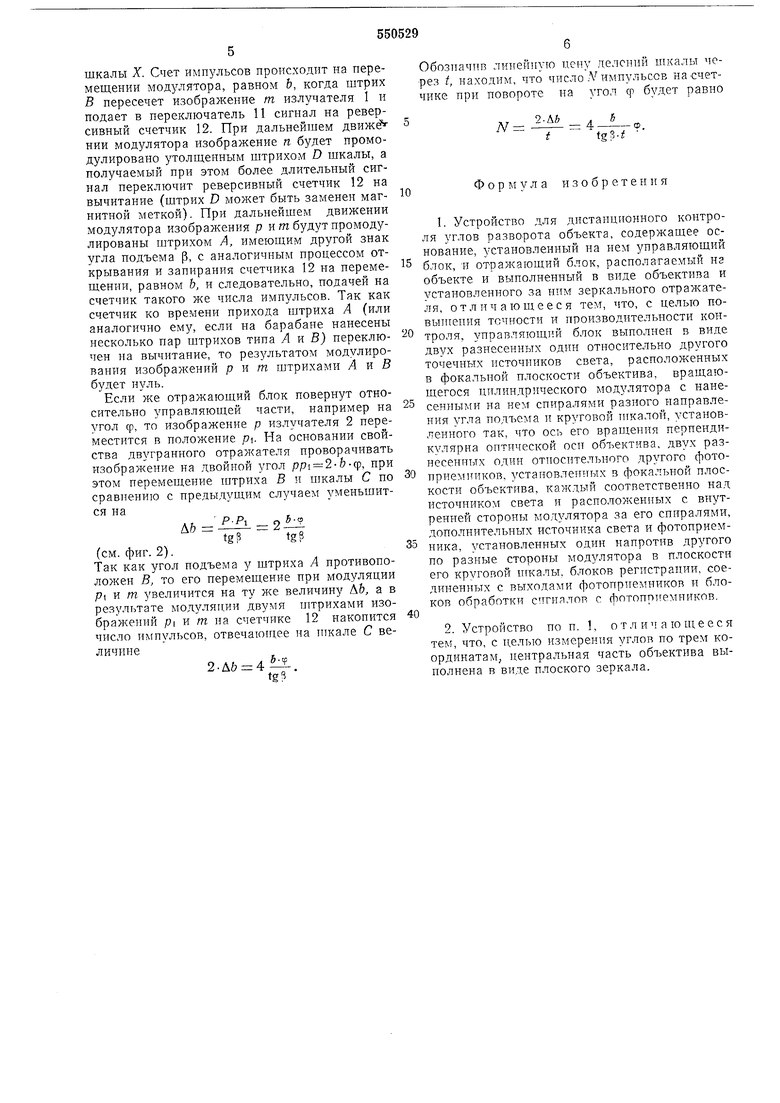
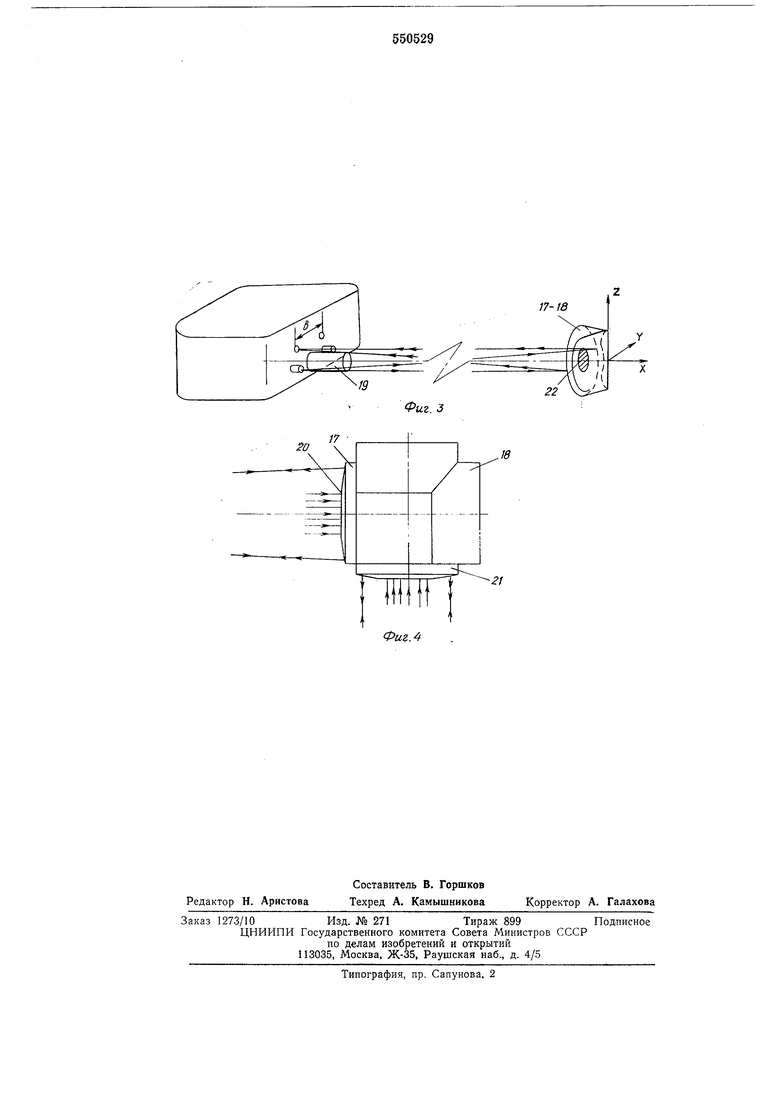
На фиг. 1 показана схема предлолсенного устройства; на фиг. 2 - часть цилиндрической поверхности модулятора с нанесенными на ней спиралями разного направления и круговой шкалой; па фиг. 3 - схема применения устройства при измерении углов по трем координатам; на фиг. 4 - вариант выполнения отражающего блока при контроле в двух перпендикулярных направлениях.
Устройство содержит основание (на фигурах не показано), па которо.м расположены три точечных источника 1, 2 и 3 света, три фотоприемника 4, 5 и 6, модулятор 7, три усилителя 8, 9 и 10 фототоков (блоки регистрации), соединенные с выходами фотоприемников, электронный переключатель 11, соединенный с выходами усилителей, реверсивный счетчик 12 импульсов, соединенный с переключателем, три блока 13, 14 и 15 питания точечных источников света п привод 16 модулятора 5 для его вращения, образующие управляющий блок, объектив 17 и зеркальный отражатель 18, установленные на объекте (на фигурах не показан) и образующие отражающий блок. Кроме того, устройство содерлсит фотоэлектрический автоколлиматор 19, укрепленный на управляющем блоке, и плоское зеркало 20, укрепленное на центральной части объектива 17 для применения устройства при контроле угловых перемещений относительно трех коор15 дипатных осей.
Для контроля разворотов в двух перпендикулярных направлениях устройство содержит дополнительный объектив 21 и дополнительный зеркальный отрал :атель 22, расположен0 ные по отношению к объективу 17 и отрал ателю 18 под прямым углом (см. фиг. 4). Работает устройство следующим образом. В управляющем блоке, укрепленном на основании, .установлены два разнесенных источ5 ника света 1 и 2, излучающих модулированный поток в сторопу отражающего блока, укрепленного на расстоянии L от управляющего п состоящего из объектива 17 и двугранного зеркального отражателя 18 с углом 90°. Ис0 точппки света 1 и 2 установлены в фокальной плоскости объектива 17 на расстоянии b между ними поэтому пучки лучей, идущие от излучателя, образуют за объективом параллельный ход лучей. Попадая на зер5 кальпый отражатель 18 с углом 90° (который быть выполпеп в виде призмы или двух зеркал), эти пучки после отрал ;епия от его граней возвращаются по тому лее нанравлению п дают изображения тир (см. фиг. 2) 0 источников света в фокальной плоскости объектива 17 с те.м же расстоянием b между нимп. Ребро отражателя 18 несколько наклонено назад, чтобы изображения /пир источников света 1 и 2 были перемещены вверх и рас5 полагались на поверхности модулятора 7, имеющего форму цилипдра с нанесенными на нем спиральными штрихами А и В, имеющими угол подъема р разного знака, и лииейясйкруговой шкалой С (см. фиг. 2). Шкала подсвечи0 вается дополнительным источником 3 света, точечное изображение которого п модулируется штрихами шкалы, а получаемые сигналы поступают на фотоприемник 4 и через усилитель 10 и электронный переключатель 11 (ти5 па триггера) на реверсивный счетчик 12 импульсов.
Измерение угла ф относительногоразворота обеих частей устройства происходит так.
При врашении модулятора 7 по стрелке
0 спиральный штрих В, пересекая изображение
р излучателя, подает через фотоприемник 5,
усилитель 8 и электронный переключатель 11
сигнал па реверсивный счетчик 12, который
начинает счет импульсов, поступающих от модуляции точечного изобралеения п щтрихами
шкалы X. Счет импульсов происходит на перемещении модулятора, равном Ь, когда штрих В пересечет изображение т излучателя 1 и подает в переключатель 11 сигнал на реверсивный счетчик 12. При дальнейшем движё НИИ модулятора изображение п будет промодулировано утолш,енным штрихом D шкалы, а получаемый при этом более длительный сигнал переключит реверсивный счетчик 12 на вычитание (штрих D может быть заменен магнитной меткой). При дальнейшем движении модулятора изображения р и m будут про модулированы штрихом А, имеющим другой знак угла подъема р, с аналогичным процессом открывания и запиранпя счетчика 12 на перемещении, равном Ь, и следовательно, нодачей на счетчик такого же числа импульсов. Так как счетчик ко времени прихода штриха А (или аналогично ем}, если на барабане нанесены несколько пар штрихов типа Л и В) переключен на вычитание, то результатом модулирования изображений р и m штрихами Л и В будет нуль.
Если же отражающий блок повернут относительно управляющей части, например па угол ф, то изображение р излучателя 2 переместится в положение pi. На основании свойства двугранного отражателя проворачивать изображение на двойной угол ppi 2-b-cp, при этом перемещение штриха В и шкалы С по сравнению с предыдущим случаем уменьшится на
2 tgstgs
(см. фиг. 2).
Так как угол подъема у штриха А противоположен В, то его перемещение при модуляции р W т увеличится на ту же величину &.Ь, а в результате модуляции двумя Н1трихами изображений PI и m па счетчике 12 накопится число импульсов, отвечаюп1ее па шкале С величине
2.дь.4. tgs
Обозначив линейную иену делений шкалы через /, находим, что число Л импульсов на счетчике при повороте на угол ф будет равно
2-Л
, а
Формула изобретен и я
1.Устройство для дистанционного контроля углов разворота объекта, содержащее основание, установленный на нем управляющий блок, и отражающий блок, располагаемый на объекте и выполненный в виде объектива и установленного за нпм зеркального отражателя, отличающееся тем, что, с целью новынтения точности и производительности контроля, управляющий блок выполнен в виде двух разнесенных один относительно другого точечных источников света, расположенных в фокальной плоскости объектива, вращаюш.егося цилиндрического модулятора с нанесенными на нем спиралями разного направления угла подъема п круговой шкалой, установленного так, что ось его вращения перпендикулярна оптической осн объектива, двух разнесенных один оттюсительного другого фотоприемников, установленных в фокаль гой плоскости объектива, каждый соответственно над источником света и расположенных с внутренней стороны модулятора за его сниралями, дополнительных источника света и фотоприемника, установленных один нанротнв другого по разные стороны модл пятора в плоскости его круговой нжалы, блоков регистрации, соединенных с выходами фотонриемников и блоков обработки спгнллор; с фотонриемников.
2.Устройство но н. 1, отличающееся тем, что, с целью измерения углов по трем координатам, центральная часть объектива вынолнена в виде плоского зеркала.
D
vln I Ml I I I i IMMI 111 И l7l Ill I i III
.2
P
17
20
Фиг. 3
.18
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехкоординатное оптическое устройство | 1978 |
|
SU771464A1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384812C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384811C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2024 |
|
RU2829832C1 |
| Устройство для контроля угловых ошибок призм | 1983 |
|
SU1158862A1 |
| Оптико-электронное устройство для контроля положения объекта | 1985 |
|
SU1307230A1 |
| Автоколлиматор | 1979 |
|
SU993013A1 |
| Фотоэлектрический автоколлиматор | 1980 |
|
SU953458A1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2017 |
|
RU2644994C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ИЗОБРАЖЕНИЯ МАРКИ В ЦИФРОВЫХ АВТОКОЛЛИМАТОРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773278C1 |
-21
Н ;
