осуществляется управление длительностью сигналов генератора 5.
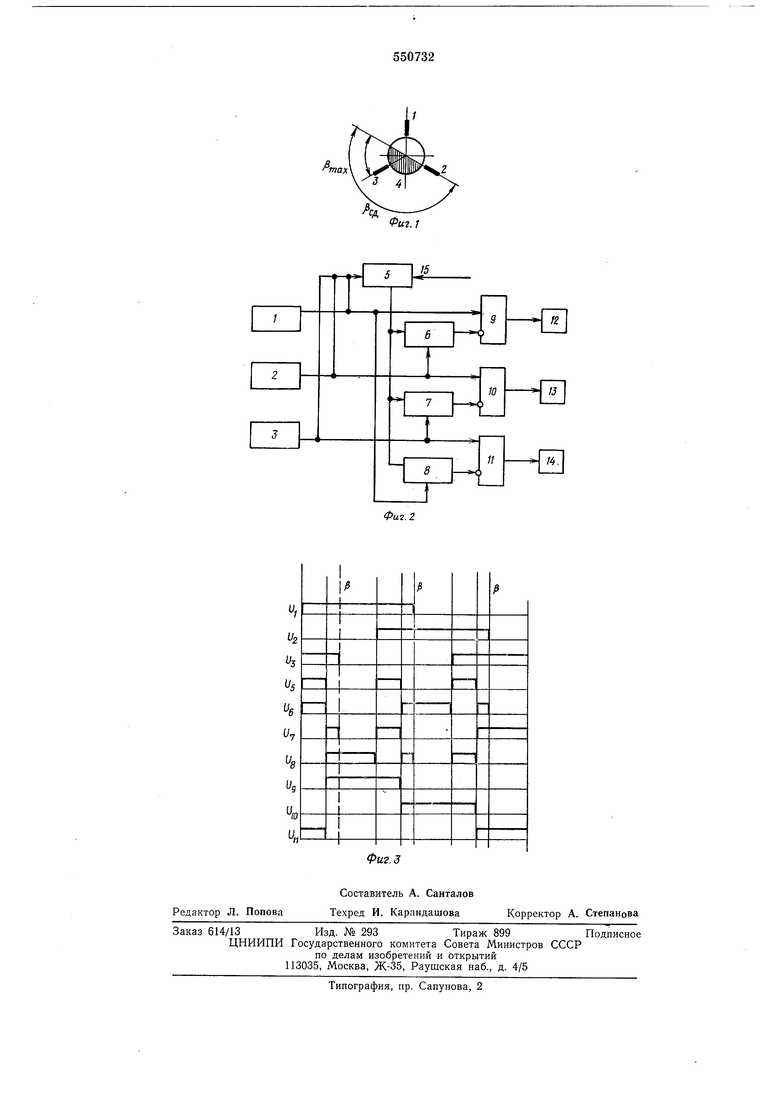
Выходы чувствительных элементов 1-3 через формирователи (на фиг. 2 не показаны) соединены со входом генератора 5 сигналов регулируемой длительности и с прямыми входами логических элементов «Запрет. Выход генератора 5 соединен с одними из входов логических элементов «неравнозначность 6-8, другой вход каждого из которых соединен с прямым входом последующего относительно него логического элемента «Запрет, т. е. вход элемента 6 соединен с входом элемента 9, вход элемента 7-с входом элемента 11 и т. д. Выход каждого элемента «Неравнозначность 6-8 соединен с запрещающим входом элементов запрет 9-11, а выходы последних соединены с управляющими цепями силовых ключей 12-13 коммутирующих секций обмотки.
Двигатель работает следующим образом.
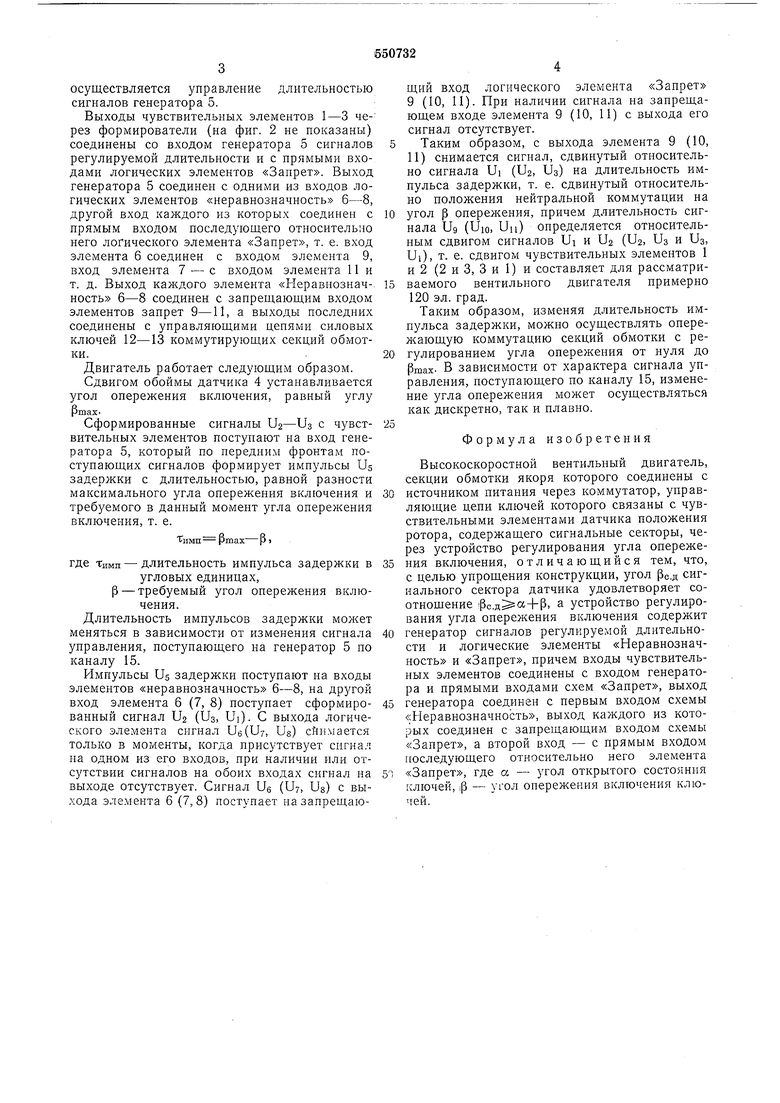
Сдвигом обоймы датчика 4 устанавливается угол опережения включения, равный углу
ртахСформированные сигналы U2-Us с чувствительных элементов поступают на вход генератора 5, который по передним фронтам поступающих сигналов формирует импульсы Us задержки с длительностью, равной разности максимального угла опережения включения и требуемого в данный момент угла опережения включения, т. е.
Тимп Ртах- р i
где Тимп - длительность импульса задержки в
угловых единицах,
Р - требуемый угол опережения включения.
Длительность импульсов задержки может меняться в зависимости от изменения сигнала управления, поступающего на генератор 5 по каналу 15.
Импульсы Us задержки поступают на входы элементов «неравнозначность 6-8, на другой вход элемента 6 (7, 8) поступает сформированный сигнал U2 (Us, Ui). С выхода логического элемента сигнал U6(U7, Us) сйимается только в моменты, когда присутствует сигнал на одном из его входов, при наличии или отсутствии сигналов на обоих входах сигнал на выходе отсутствует. Сигнал Ue (Uy, Us) с выхода элемента 6 (7,8) поступает на запрещающий вход логического элемента «Запрет 9 (10, И). При наличии сигнала на запрещающем входе элемента 9 (10, И) с выхода его сигнал отсутствует.
5 Таким образом, с выхода элемента 9 (10, И) снимается сигнал, сдвинутый относительно сигнала Ui (U2, Us) на длительность импульса задержки, т. е. сдвинутый относительно положения нейтральной коммутации на
0 угол р опережения, причем длительность сигнала Ug (Uio, Uii) определяется относительным сдвигом сигналов Ui и U2 (U2, Us и Us, Ui), т. е. сдвигом чувствительных элементов 1 и 2 (2 и 3, 3 и 1) и составляет для рассматри5 Баемого вентильного двигателя примерно 120 эл. град.
Таким образом, изменяя длительность импульса задержки, можно осуществлять опережающую коммутацию секций обмотки с регулированием угла опережения от нуля до Ртах, в зависимости ОТ характера сигнала управления, иоступающего по каналу 15, изменение угла опережения может осуществляться как дискретно, так и плавно.
Формула изобретения
Высокоскоростной вентильный двигатель, секции обмотки якоря которого соединены с
0 источником питания через коммутатор, управляющие цепи ключей которого связаны с чувствительными элементами датчика положения ротора, содержащего сигнальные секторы, через устройство регулирования угла оиереж:е5 ния включения, отличающийся тем, что, с целью упрощения конструкции, угол ро.д сигнального сектора датчика удовлетворяет соотношение Рс., а устройство регулирования угла опережения включения содержит
0 генератор сигналов регулируемой длительности и логические элементы «Неравнозначность и «Запрет, причем входы чувствительных элементов соединены с входом генератора и прямыми входами схем «Запрет, выход
5 генератора соединен с первым входом схемы «Неравнозначность, выход каждого из которых соединен с запрещающим входом схемы «Запрет, а второй вход - с прямым входом последующего относительно него элемента
1 «Запрет, где а - угол открытого состояния ключей, |р - угол оиережения включения ключей.
А
так.
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1974 |
|
SU663034A1 |
| Способ управления высокоскоростным бесконтактным двигателем постоянного тока | 1974 |
|
SU660159A1 |
| Устройство для управления преобразователем | 1980 |
|
SU892650A1 |
| Автоматический синхронизатор с постоянным углом опережения | 1982 |
|
SU1065957A2 |
| Управляемый вентильный электродвигатель | 1976 |
|
SU741383A1 |
| Устройство для направленной фильтровой защиты с проводным каналом связи линии электропередач от коротких замыканий | 1990 |
|
SU1702475A1 |
| Преобразователь амплитудного значения импульсного напряжения в постоянное напряжение | 1990 |
|
SU1716599A2 |
| Устройство для управления весовым порционным дозатором | 1991 |
|
SU1830518A1 |
| Синхронизатор с постоянным временем опережения | 1990 |
|
SU1771034A1 |
| Автоматический синхронизатор спОСТОяННыМ углОМ ОпЕРЕжЕНия | 1979 |
|
SU838897A1 |
Г
(/г
«5 5
6
(/7
