25, стабилитроны 26, 27, датчик SS положения якоря, диоды 29, 30, 31.
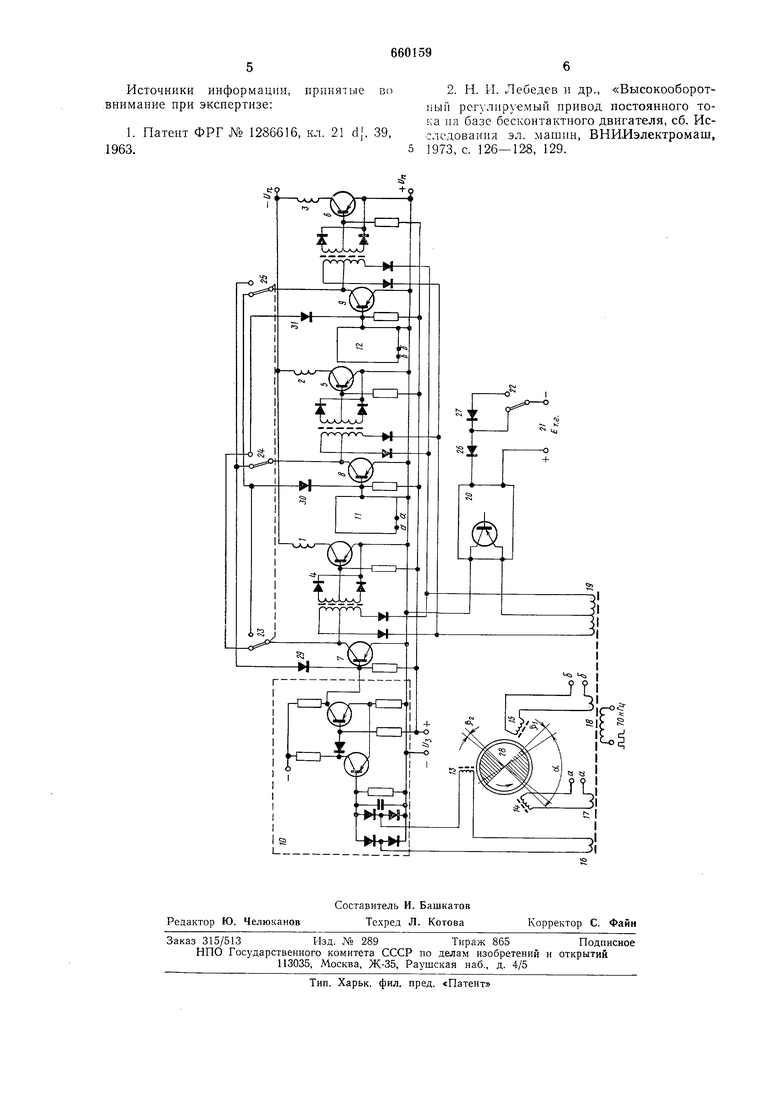
Секции /, 2, 3 обмотки двигателя через силовые ключи 4, 5, € подключены к источнику питания постоянного тока. Управляюн.1ие цепи силовых ключей 4, 5, 6 связаны через транзисторы 7, 8, 9 с выходами триггеров 111мидта 10, и, 12. Последние имеют на входах диодные мосты, включенные в последовательные цепи, состоящие из обмотак дроссельных чувствительных элементов 13, 14, 15 датчика положеиия и источников 16, 17, }8 переменного напряжения повышенной частоты соответственно. Чувствительные элементы 13, 14, 15 раеположе1 Ы относительно друг друга ео едвигом на угол а±ЗбО эл. град., где а - угол коммутации секции обмотки, равный 120 эл. град. Питание управляющих цепей силовых ключей 4, 5, 6 осущеетвляется от источника 19 через реле 20, обесиечивающее заданный уровень скорости. Вход реле 20 включен в последовательную цепь, состоящую на источника 21 тахогеиераторной ЭДС, канала 22 реле скорости и опорных стабилитронов 26, 27. Датчик 28 якоря иоложеиия имеет два сигнальных сектора, угловой размер каждого из которых составляет а + (Pi - fb) эл. град., где (5i - величнпа угла опережения включения для более высокой скорости (диапазона скоростей), равная 10-20 эл. град., а )2 - величина угла онереження вк-яючения для более иизкой скорости (диапазона скоростей), равная 2-5 эл. град. Для осуществления логичееких операций вычитания сигналов служат диоды 29, 30, 31, еоединяюпию выходы триггеров 10, 11, 12 с коллекторными цепями транзисторов 7, 8, 9 управления силовыми ключами через каналы 23, -24, 25 реле скорости.
Устройство работает следуюнщм образом.
Появление сигнала с какого-либо из чувствительных элементов, например 13, приводит к срабатывапию триггера 10, сигиалом с которого отпирается траизистор 7, что, в свою очередь, приводит к отпиранию силового ключа 4 и нодаче напряжения на секцию обмотки /. В результате создается электромагнитный момент, разворачивающий датчи.к якоря 28, сигнальным сектором которого иасыщается чувствительный элемент 15, что обеспечивает дальнейший поворот ротора и разгон двигателя по естественной механической характеристике.
При доети/кении тахогенераторной значения оиорного напряжения (напряжепня пробоя стабилитрона 26 или 26 и 27 встунит в работу реле 20, обеспечивающее поддержание скорости двигателя на заданном уровне. Чуветвительные элементы располагают относительпо магнитных осей секций обмоткн таким образом, чтобы передний фронт их угла включения был сдвинут относительно положения нейтральной коммутации в сторону опережения включения на угол РЬ а задний фронт угла включения сдвинут относительно положения нейтральной коммутации в сторону опережения от5 ключення на угол J32.
При положении реле скорости, показанном на чертеже, обеспечивается высокая скорость вращения двигателя. При этом каждый чувствительный элемент, например 13, соединен и с прямым входом элемента «запрет 8, к запрещаюн1,ему входу .которого через канал 22 реле скорости подключен последующий чувствнтельный элемент 14, При наличии сигиала на запрещающем входе логического элемента сигнал с его выхода отсутствует.
Таким образом, длительиость сигнала управления силовым ключом нри наличии угла оиережения включения pi ограничивается углом сдвига между чуветвительныг,1И элементами, равным углу коммутации.
Для работы на нижней скорости реле переключают таким обрг.зом, что на запрещающий вход логического элемента, например, 8 поступает сигнал с чувствительпого элемента 15. В этом слу;ае сигнал управления от логического элемента 8 появляется только при отключении чувствительпого элемента 15, поэтому угол опережения включения секций будет равен р2.
Таким образом, устройство, без усложнения датчика иоложеппя ротора двигателя, позволяет реализовать способ управлепия бескоптактного двигателя постояпного тока, при котором ток якоря коммутируется с двумя значениями угла опережения в зависимоюти от скорости двигателя.
Формула изобретения
Способ управления высокоскоростным
бесконтактным двигателем постояпного тока, состоящий в том, что коммутируют ток в обмотке якоря с двумя значениями угла опережения в зависимости от скорости вращения двигателя по сигналам датчика положепия ротора, отличающийся тем, что, с целью упрощения, формируют датчиком иоложеиия ротора импульсы, передний фронт которых опережает положепие нейтральиой коммутации на угол, соответствующий больщой скорости вращепия двигателя, а задний фронт онережает положение иоследующей нейтральной коммутации па угол, соответствующий малой скороети вращения двигателя, причем сигнал на коммутацию тока в обмотке якоря подают при больших оборотах согласно иереднему фронту нмнульса от датчика положения ротора, а на малых оборотах -- согласно заднему фронту предыдуп1его импульса от датчика
положения ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1974 |
|
SU663034A1 |
| Высокоскоростной бесконтактный электродвигатель постоянного тока | 1973 |
|
SU454649A2 |
| Высокоскоростной вентильный двигатель | 1974 |
|
SU550732A1 |
| Многоскоростной бесконтактный электродвигатель постоянного тока | 1973 |
|
SU445968A1 |
| Вентильный двигатель | 1976 |
|
SU663037A1 |
| Управляемый вентильный электродвигатель | 1974 |
|
SU604091A1 |
| Способ управления реверсивным бесконтактным электродвигателем постоянного тока | 1971 |
|
SU591990A1 |
| Вентильный электродвигатель | 1974 |
|
SU527804A1 |
| Вентильный электродвигатель | 1981 |
|
SU970578A1 |
| Вентильный электродвигатель | 1983 |
|
SU1095323A1 |
