154) УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРИВОДА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования механизмов шагового перемещения | 1981 |
|
SU1015401A1 |
| Вычислительная система для решения дифференциальных уравнений | 1975 |
|
SU620980A1 |
| Устройство для моделирования системы радиосвязи | 1980 |
|
SU924713A1 |
| Аналого-цифровая вычислительная система и аналоговая вычислительная машина (ее варианты) | 1983 |
|
SU1259300A1 |
| Анализатор спектра | 1984 |
|
SU1237987A1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1272507A1 |
| Тренажер сварщика | 1984 |
|
SU1217151A1 |
| Интегрирующий преобразователь тока в код | 1989 |
|
SU1741264A1 |
| Тренажер для обучения сварщиков | 1986 |
|
SU1441446A1 |
| Устройство для воспроизведения нелинейных функций | 1984 |
|
SU1176348A1 |
Изобретение относится к аналоговой вычиспительно л технике, в частности, к устройствам для моделирования систем автоматического регулирования и управления объектами, содержащими в качестве испол- нительного органа привод программного управления.
Известны устройства для моделирования приводов прохраммного упраншения, применяемые в системах автоматического управления. а также при моделировании указанных систем на аналоговых вычислительных машинах (АВМ).
Первое из известных устройств построено на основе полной математической модели имитируемого привода программного управления с последующим преобразованием математической модели к системе мащинных уравнений, удобных для набора на АВМ. Такой имитатор содержит большое число вычислительных блоков. Применение большог количества нелинейных блоков и блоков произведения не позволяет получить требуемую точность решения задачи. Причем решение может быть получено в узком динамическом диапазоне работы имитируемого привода вследствие ограниченной полосы пропускания штатной аппаратуры современных АВМ. Так как модель привода занимает существенную часть штатных блоков АВМ, то увеличивается общий объем решаемой задачи, что усложняет откладку задачи, снижает надежность и увеличивает сроки и стоимость работ.
Второе устройство, состоящее из типовых вычислительных и специализированных блоков построено по более прогрессивному методу гибридного моделирования. Это позволяет часть уравнений привода и характеристки отдельных его узлов воспроизводить на внешних специализированных блоках, не входящих в состав АВМ, и тем самым разгрузить АВМ. В этом случае точность решения задачи в целом и допустимый динамический диапазон получаемых решений также остается недостаточным и не может полностью удовлетворить существуюш.им техническим требованиям.
Ближайшее к данному изобретению техническое решение, содержащее блок нелинейности и интеграторы, выходы которых подключены к входам блоков моделирования перемещений испопнитепьных органов привода, выполнено в виде автономного устройства, обладает достаточно высокой точностью,
широким динамическим диапазоном и высоко надежностью работы.
Это техническое решение хотя и имеет ряд преимуществ по сравнению с описанными выше в части точности, надежности и динамического диапазона, однако, позволяет воспроизводить только статические и динамические характеристики шаговых двигателей работающих по строго определенному пропорционально-шаговому алгоритму и не способно имитировать какие-либо другие алгоритмы работы привода.
Модель привода программного управления должна обеспечить воспроизведение различных алгоритмов движения исполнительного органа реального пр-1вода программного управления, что не может быть достигнуто при использовании прототипа.
Цель изобретения - увеличение точности воспроизведения статических характеристик имитируемого привода и расшире11ие класса решаемых задач.
Для достижения этой цели устройство содержит анализатор знака, генератор тактовых импульсов, биполярный ключ, реверсиный счетчик, программный блок, реверсивный кольцевой коммутатор и сумматор,причем выход блока нелинейности подключен к входу анализатора знака и первому вхо- ду биполярного ключа, второй вход которого соединен с выходом генератора тактовых импульсов, выход биполярного ключа подсоединен к первому входу реверсивного счетчика, выход которого через программны блок соединен с первым входом реверсивного кольцевого коммутатора, выходы которого подключены к входам интеграторов, выход анализатора знака подключен к вторы входам реверсивного счетчика и реверсивного кольцевого коммутатора, выходы блоков моделирования перемещений исполнительных органов привода подключены к входам сумматора.
Повышение точности воспроизведения ста тических и динамических характеристик реалного привода программного управления достигается совокупностью признаков, получаемых за счет объединения аналоговых и дискретных блоков, а таклсе установления новых функциональных связей меледу ними, позволяющих получить новый положительный эффект, т. е. за счет введения в схему устройства для моделирования привода блока программного управления, генератора тактовых импульсов, кольцевого реверсивного коммутатора и кольцевого счетчика.
Расширение класса решаемых задач достигается за счет применения блоков дискреного типа, имеющих широкий динамический диапазон и широкие пределы настройки на заданный алгоритм функционирования.
Применение специализированных функциональных блоков и установление новых связей между ними позволяет значительно сократить общее количество вычислительных
блоков, необходимых для воспроизведения характеристик привода программного управления по сравнению с известными устройствми того же назначения.
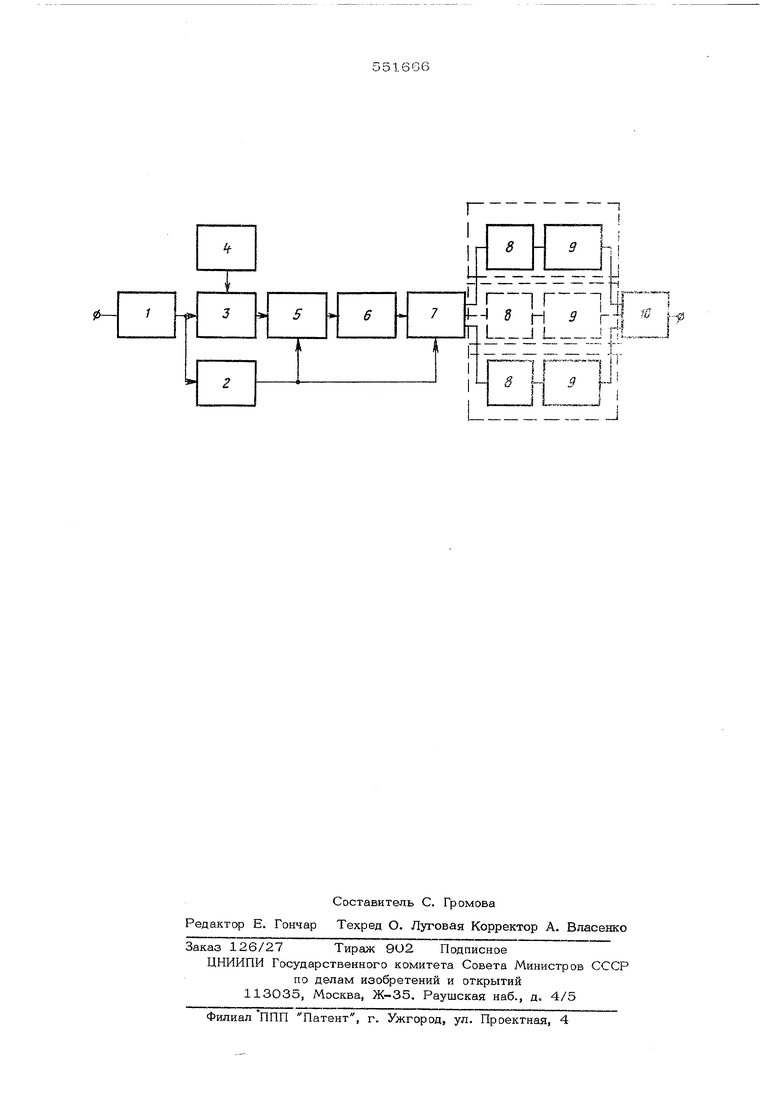
На чертеже продставлена блок-схема устройства ИЛИ :..олв; гро-. привада.
Предлагаемое устпойстии содоржйт нелинейноеги 1, апа изатоо знака 2, биполярный ключ 3, гекерагс р тлхтоькх г мяульсов 4, реверсивный счотчил 5. программный блок 6. реверстшный ко лмутатар 7, блоки моуелироаз;;ия перемешо глй исполнительных органаз прИБОДз, состоящие из последовательно сондянен:;ых. KriierijaTopOB 8 и формирующих блоков 9. а т-аклн.е сумматора 1О. Выход сумматора 10 является выходом ус1ройства.
Блок нелинейности 1 предназначем для воспроизведения статических характеристик имитируемого привода, содержащих зону нечувствительности.пропордиональный участок и зону насыщения, выход блока нелинейности 1 подключен к входу анализатора знака 2 и к первому входу биполярного ключа 3, второй вход когорогу соединен с входом генератора тактовых импульсов 4. Генератор тактовых импульсов 4 предназначен для синхронизации и временного управления работой устройства в целом и чере биполярный ключ 3 соединен с реверсивным счетчиком 5, который служит для выработки управляющих импульсов с частотой, пропорциональной дискретности включения исполнительных органов. Выход реверсивного счетчика 5 соединен с программным блоком 6, который в соответствии с заданным алгоритмом осуществляет упраплеш е работой кольцевого реверсивного коммутагора 7, второй вход которого свизай с выходом анализатора 2 и с реверскзным счетчиком 5. Реверсивный кольцевой коммутатор 7 предназначен для поочередного включения блоков моделирования перемеяг.еиий исполнительных органов привода, состоящих йз последовательно включенных интеграторов S и формирующих блоков 9. Выходы форми рующих блоков 9 подключены к входам сумматоров 10. Анализатор знака 2 предназначен для выработки сигналов управяения, определяющих в зависимости от полярности входного сигнала прямую или обратную последовательность работы реверсивного счетчика 5 и реверсивного кольцевого коммутатора 7. Для моделирования работы приводов программного управления с различными алгоритмами функционирования и различными временными характеристи ками в реверсивном счетчике 5 и программном блоке 6 предусмотрена возможность регулировки и задания основных временных параметров имитируемого привода. Работа устройства для моделирования привода протекает следующим образом. Входной сигнал, пропорциональный сигналу рассогласования системы управления объектом, поступает на вход блока нелинейности 1, где преобразуется в соответствии с заданной статической характеристикой ими тируемого привода, и с выхода блока нелинейности 1 поступает одновременно в два канала: канал управления положением выходного вала привода (блоки 3-7) и канал управления направлением движения выходного вала привода (блок 2). Проходя по первому каналу, сигнал с выхода блока нелинейности 1 поступает на вход биполярного ключа 3, который в зависимости от амплитуды сигнала, действующего на его входе, вырабатывает разрешающий сигнал, поступающий на вход реверсивного счетчика 5, который подсчитывает число импульсов, поступающих с выхода генератора тактовых импульсов 4. С выхода реверсивного счетчи ка 5 сигнал управления через определенные промежутки времени поступает на вход программного блока 6, в котором предварительно заложена программа функционирования распределительного устройства реального привода. С выхода блока программного управления 6 сигнал управления поступает на реверсивный кольцевой коммутатор 7, который в требуемой последовательности коммутирует выходные цепи (блоки 8 и 9), имитирующие перемещение исполнительных органов и их динамику. Каждая выходная цепь состоит из интегратора 8, имитирующего перемещение привода, и формирующего блока 9, имитирующего динамику привода. Число выходных цепей (блоки 8 и 9) практ чески не ограничено и определяется числом исполнительных органов ик-штируемого приво да. С выходов формирующих блоков 9 сигна поступает на соответствующие входы сумматора 10, на выходе которого вырабатывается сигнал, пропорциональный суммарному перемещению исполнительных органов имитируемого привода. Одновременно сигнал с выхода блока нелинейности 1 поступает на вход анализатора знака 2, который в зависимости от полярности сигнала, действующего на его входе, вырабатывает управляющий сигнал для реверса реверсивного счетчика 5 и реверсивного кольцевого коммутатора 7, изменяя тем самым направление движения исполнительных органов имитируемого привода. Ожидаемый технико-экономический эффект от внедрения изобретения состоит в следующем: -повыщение точности воспроизведения статических и динамических характеристик реального привода программного управления; -расширение класса рещаемых сзадач (области исследования сложных систем автоматического регулирования, содержащих в качестве исполнительного органа привод программного управления); - сокращение объема оборудования, необходимого для набора математической модели привода программного управления на АВМ, за счет применения автономного прибора (устройства); -сокращение стоимости и сроков исследования сложных систем автоматического управления. Формула изобретения Устройство для моделирования привода, содержащее блок нелинейности и интеграторы, выходы которых подключены ко входам блоков моделирования перемещений исполнительных органов привода, отличающееся тем, что,с целью увеличения точности и расширения класса решаемых задач, оно содержит анализатор знака, генератор тактовых импульсов, биполярный ключ, реверсивный счетчик, программный блок, реверсивный кольцевой коммутатор и сумматор, причем выход блока нелинейности подключен ко входу анализатора знака и первому входу биполярного ключа, второй вход которого соединен с выходом генератора тактовых импульсов, выход биполярного ключа подсоединен к первому входу реверсивного счетчика, выход которого через программный блок соединен с первым входом реверсивного кольцевого коммутатора, выходы которого подключены ко входам интеграторов, выход анализатора знака подключен ко вторым входам реверсивного счетчика и реверсивного кольцевого коммутатора, выходы блоков моделирования перемещений исполнительных органов привода шдключены ко входам сумматора.
SZJ-
1 }
Jl Iff .
8 r- 9
.Jr. I
П
ft
H:
inj I. 1 j Hl
