1
Изобретение относится к экспериментальному определению динамических характеристик линейных объектов, к числу которых могут отпоситься автоматические устройства и их элементы, технологические установки, электрические машины, газо-теплообменные агрегаты и т. д.
Известные устройства для определения динамических характеристик линейных объектов содержат генератор синусоидальных колебаний, соединенный со входами исследуемого объекта и блоков измерения фазы и амплитуды на выходе объекта 1-4. Эти устройства имеют низкую помехозащищенность и, следовательно, низкую точность определения динамических характеристик при наличии на выходе объекта помехи даже низкого уровня. - Из известных устройств наиболее близким к изобретению по технической сущности является устройство для определения динамических характеристик, содержащее генератор синусоидальных колебаний, соединенный со входом объекта и через последовательно соединенные первую модель объекта, первый сумматор и первый квадратор - со входом первого интегратора, а выход объекта соединен с одним из входов первого сумматора 5. Это устройство характеризуется сложностью динамической структуры модели, содержащей большое количество настраиваемых
параметров, плохой сходимостью процесса поиска оптимальных параметров модели и невысокой точностью определения динамических характеристик объекта при наличии помехи
высокого уровня с ззкополосным спектром и неадекватности предполагаемой структуры модели структуре объекта.
Целью изобретения является повышение точности и сокращение времени определения
динамических характеристик линейных объектов произвольно-сложной структуры, в предлагаемом устройстве это достигается тем, что оно содержит последовательно соединенные инвертор, вторую модель объекта, второй сумматор, второй квадратор, второй интегратор, третий сумматор, блок определения модуля и блок определения экстремума, выходы которого соединены соответственно с управляющими входами первой и второй моделей объекта, выход первого интегратора соединен с одним из входов третьего сумматора, а вход инвертора соединен со входом объекта, выход которого соединен со вторым входом второго сумматора. Для повышения быстродей-, ствия устройства модели объекта содержат последовательно соединенные звено чистого запаздывания и статическое звено.
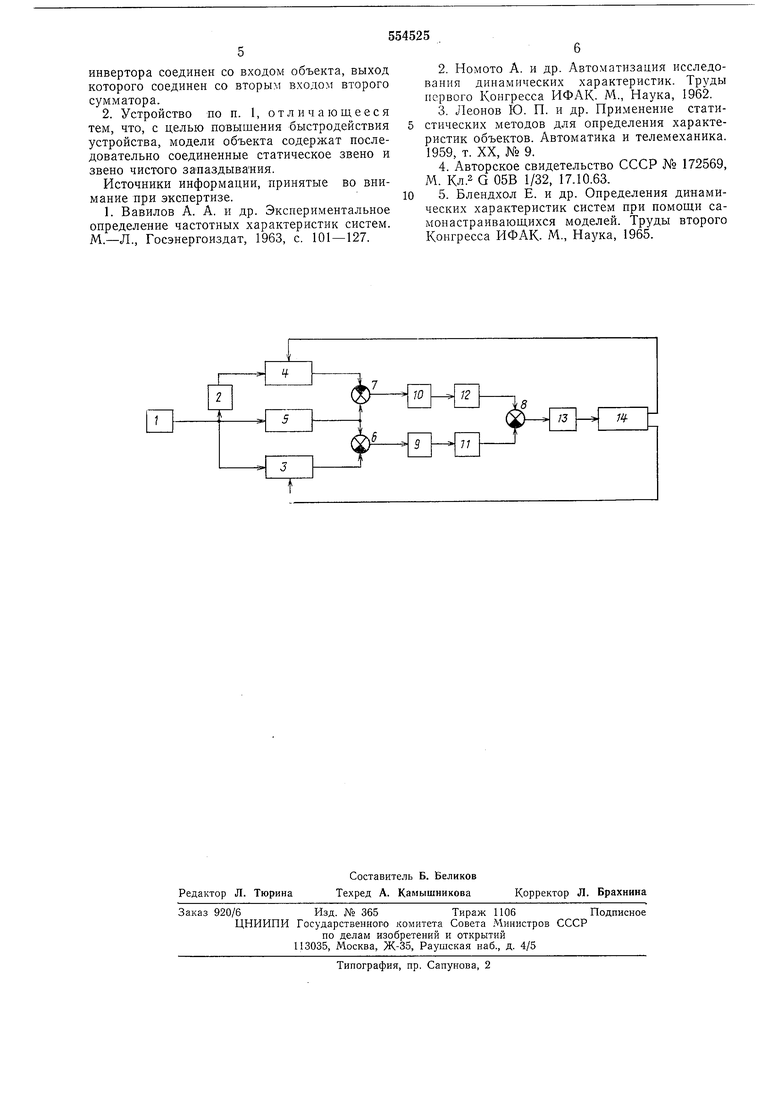
На чертеже показана блок-схема предлагаемого устройства и приняты обозначения:
1-генератор синусоидальных колебаний;
2 - инвертор; 3 и 4 - первая и вторая модели объекта; 5 - исследуемый объект; 6, 7 и 8 - первый, второй и третий сумматоры, 9 и 10 - первый и второй квадраторы; 11 и 12 -первый и второй интеграторы; 13 - блок определения модуля, 14 - блок определения экстремума.
На выходы исследуемого объекта 5 и моделей объекта 3 и 4 с передаточными функциями
.(р)Ки,е- WM (р) К, е-
(где /(MI и /(мг - настраиваемые коэффициенты усиления первой и второй моделей; Тм - настраиваемое время запаздывания) подается с генератора синусоидальных колебаний 1 непосредственно и через инвертор 2 гармоническое воздействие частоты coj при фиксированном интервале наблюдения Т (где сог - частота из последовательности частот {со,} исследуемого диапазона).
На первом этапе определяется величина запаздывания (т. е. фазовый сдвиг на частоте Ш(). Для этого на входы объекта 5 и моделей объекта 3 и 4 с выхода генератора 1 подается сигнал ;с() sin сог. На выходах сумматоров 6 и 7 образуются соответственно сигналы
.,(t) y(t)-z,(t), 4()-z(f).
где z/(0 AiSin(u)i + фог)+-(0 -реакция объекта на сигнал x(t);
Zi(t)K,Mi cos(cui -фмг)-реакция первой модели на воздействие x(t);
22(-/Смг cos(cuj - фмг) -реакция второй модели на воздействие x(t);
n(t) -случайная помеха; Аг, /См, , /Смг -соответственно коэффициенты усиления объекта и моделей объекта на частоте Шг;
фог ТогСОг, фмг ТмгООг - СООТВеТСТВбННО фазовые сдвиги объекта и моделей объекта на частоте сог.
При поиске фазового сдвига объекта на частоте сог коэффициенты усиления моделей выбирают равными единице. На выходе сумматора 8 образуется сигнал г
.,,(t)(t) (y(t)-z,(t Ydtот
-Y(y()-(t}Ydt,
6
где Г -длина реализации (интервал наблюдения).
Выходной сигнал блока 13 минимизируется блоком 14 на первом этапе путем подстройки времени запаздывания моделей объекта. Минимум этого сигнала на частоте Wj достигается при
9ог РмгНа втором этапе при определении коэффициента зсиления объекта на частоте со; фиксируется полученный фазовый сдвиг, устанавливается коэффициент усиления второй модели, равный нулю, и производится подстройка коэффициента усиления первой модели. Блок определения экстремума осуществляет минимизацию выходного сигнала блока 13 путем подстройки коэффициента усиления первой модели.
Коэффициент усиления исследуемого объекта на частоте со, определяется по формуле
л .
1 - -п- .
2
Таким образом, в предлагаемом устройстве производится поиск коэффициента усиления и фазового сдвига исследуемого объекта для всей последовательности частот {сог}. Полученные значения Ai и фог позволяют построить амплитудно-фазовую частотную характеристику исследуемого объекта, которая полностью характеризует его динамические свойства. Структура моделей и процедура определения Ai и Фог не зависят от сложности структуры объекта. Следовательно, предлагаемое устройство позволяет определять динамические характеристики объектов произвольно сложной структуры, причем не возникает
погрешностей из-за неадекватности структуры моделей и объекта. Поскольку настраиваются всего два параметра, то всегда обеспечивается сходимость процессов поиска за один цикл перестройки параметров, т. е. высокое быстродействие работы устройства. Точность определения динамических характеристик с помощью предлагаемого устройства не зависит от фазового сдвига исследуемого объекта и при наличии помехи высокого уровня в исследуемом диапазоне. частоты по крайней мере в два раза выше, чем при использовании известных устройств определения динамических характеристик линейных объектов.
Формула изобретения
1. Устройство для определения динамических характеристик линейных объектов, содержащее генератор синусоидальных колебаНИИ, соединенный со входом объекта и через последовательно -соединенные -первую модель объекта, первый сумматор и первый квадратор- со входом первого интегратора, а вы-, ход объекта соединен с одним из входов первого сумматора, отличающееся тем, что, с целью повыщения точности устройства, оно содержит последовательно соединенные инвертор, вторую модель объекта, второй сумматор, второй квадратор, второй интегратор,
третий сумматор, блок определения модуля и блок определения экстремума, выходы которого соединены соответственно с управляющими входами первой и второй моделей объекта, выход первого интегратора соединен с
одним из входов третьего сумматора, а вход
инвертора соединен со входом объекта, выход которого соединен со вторым входом второго сумматора.
2. Устройство по н. 1, отличающееся тем, что, с целью повышения быстродействия устройства, модели объекта содержат последовательно соединенные статическое звено и звено чистого запаздывания.
Источники информации, принятые во внимание при экспертизе.
1. Вавилов А. А. и др. Экспериментальное определение частотных характеристик систем. М.-Л., Госэнергоиздат, 1963, с. 101 - 127.
2.Номото А. и др. Автоматизация исследования динамических характеристик. Труды первого Конгресса ИФАК. А1., Наука, 1962.
3.Леонов Ю. П. и др. Применение статистических методов для определения характеристик объектов. Автоматика и телемеханика. 1959, т. XX, № 9.
4.Авторское свидетельство СССР № 172569, М. Кл.2 Q 05В 1/32, 17.10.63.
5. Блендхол Е. и др. Определения динамических характеристик систем при помощи самонастраивающихся моделей. Труды второго Конгресса ИФАК. М., Наука, 1965.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения частотных характеристик динамических объектов | 1977 |
|
SU744474A1 |
| Устройство для определения параметров объекта | 1987 |
|
SU1446602A1 |
| Устройство для определения частотных характеристик систем автоматического управления | 1980 |
|
SU892419A2 |
| Устройство для определения коэффициента усиления объекта | 1984 |
|
SU1228080A1 |
| Устройство для определения амплитуд и фаз гармонических составляющих напряжения | 1980 |
|
SU922655A1 |
| Система автоматической идентификации | 1978 |
|
SU930270A1 |
| Устройство для определения коэффициента усиления объекта | 1985 |
|
SU1291932A1 |
| Устройство для определения оценок амплитудно-частотных характеристик | 1987 |
|
SU1439537A1 |
| ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР | 2015 |
|
RU2582557C1 |
| Устройство для определения частотных характеристик динамических объектов | 1981 |
|
SU978067A1 |
