(54) СИСТЕМА АВТОМАТИЧЕСКОЙ ИДЕНТИФИКАЦИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Самонастраивающаяся система управления | 1981 |
|
SU1008698A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| Самонастраивающаяся система регулирования | 1972 |
|
SU448432A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1109713A1 |
| Дифференциальная система идентификации | 1973 |
|
SU728113A1 |
| Многоканальное устройство для идентификации объекта управления | 1975 |
|
SU602916A1 |
I
Изобретение относится к самонастраивающимся системам и может быть применено для поисковой идентификации параметров обучаемой модели.
Известно устройство идентификации обучаемой модели, основанное на исполЕэ- зовании вспомогательных операторов, которое содержит объект идентификации и настраиваемую модель, выходы которых подключены к элементу сравнения, а также ряд перестраиваемых фильтров по числу настраиваемь1х параметров, реализующих вспомогательные операторы. На входы фильтров подается входной сигнал объекта и модели, а выходы совместно с выходом элемента сравнения подключены к множительному устройству. Выходы последних через астатические фильтры подключены к параметрическим входам модели и вспомогательных операторов ll .
Такая система громоздка в реализации в связи с тем, что каждый настраиваемый параметр требует отдельного
канала обработки информации, содержащего, в частности, перестраиваемый фильтр. Кроме того, для организаави системы со вспомогательными операторами требуется измерение не только реакций модели и объекта на входной сигнал, но и самого входного сигнала, что не всегда легко осуществить.
Наиболее близкой по технической сущности к предлагаемой является система
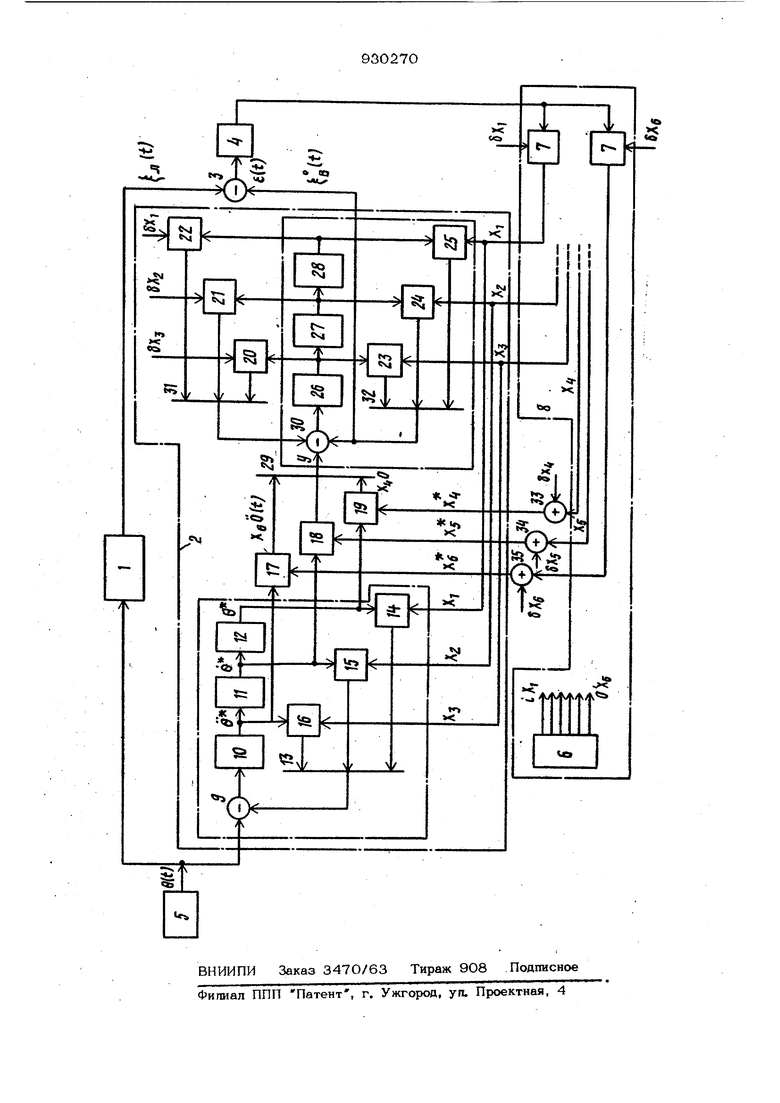
10 идентификации.с поисковой модуляцией параметров, содержащею генератор поисковых сигналов, источник пробного сигнала, выход которого подключен к входу объекта идентификации и к первому вхо15ду первого сумматора, выход которого подключен к входу первой цепочки последовательно соединенных интегрдторйв, выход каждого из которых подключен к первому входу соответствухзинего множнтельного устройства первой группы и к первому входу соответствующего множительного устройства второй группы, выЬсоды множительных устройств первой и второй групп соединены соответственн с входами второго и третьего сумматор выход второго сумматора соединен с вторым входом первого сумматора, элемент сравнения, первый вход которого соединен с выходом объекта идентификации, а выход через амплитудный детекто подключен к первым входам блоков формирования параметрических управлений первой и второй групп, выход ка кдого блока формирования параметрических управлений второй группы через соответ ствующий сумматор поисковых сигналов соединен с вторым входом соответствую щего множительного устройства второй группы, второй вход соответствующего сумматора поисковых сигналов соединен с вторым входом соответствующего блока форА ирования параметрического управлейия второй группы, вторые входь соответствующих блоков формирования .параметрических управлений соединены с соответствующими выходами генератепя поисковых сигйалов Г2 . Недостатки известной системы заклю чаются в ограниченности диапазона поисковых частот и уменьшений точности идентификации при повышении частот поисковых сигналов из-ва, неквазистационарных эффектов процесса настройки параметров модели объекта, обусловленн искажениями поисковых параметрических сигналов при прохождении через модель объекта. Цель изобретения - повышение точности идентификации и расширение облас ти применения за счет расширения диапазона поисковых частот. Поставленная цель достигается тем, что в устройство введены четвертый, пятый и шестой сумматоры, вторая цепочка последовательно соединенньк интеграторов, аналогичная первой цепочке интеграторов, а также третья и четвертая группы множительных устройств, причем первый вход четвертого суммато ра соединен с выходом третьего сумматора, а выход - с входом второй цепочки интеграторов, выход каждого из кото рых соединен с первым входом соответствующего множительного устройства третьей группы и с первым входом соот ветствуюшего множительного устройства четвертой группы, выходы множительны устройств третьей и четвертой групп соединены соотвегсгвенно с входами пятого и шестого сумматоров, выходы которых соединены соответственно с вторым и третьим входами четвертого сумматора, вторые входь соответствующих множительных устройств первой и четвертой групп соединены соответствующими выходами блоков формирования параметрических управлений первой группы, вторые входы соответствующих множи- тельных устройств третьей группы соединены с вторыми входами соответствующих блоков формирования параметрического управления первой группы, второй вход элемента сравнения соединен с выходом шестого сумматора. На чертеже представлена блок-схема системы автоматической идентификации для случая, когда объект идентификации описывается оператором с передаточной функцией %iP,R(P,5(;Q(P,X),,lP4Xi где Х , ... , Х - настраиваемые коэффициенты;р - оператор дифференцирования;R(Р, X) - оператор числителя передаточной функции; fi(p,X) - оператор знаменателя передаточной функции,, Система автоматической идентификации содержит объект 1 идентификации, модель 2 объекта идентификации, сравниваюшее устройство 3, амплитудный детектор 4, генератор 5 поисковых сигналов, генератор 6 поисковых сигналов, блоки формирования параметрических управлений первой группы 7 - 7 з и второй группы 7(j, экстремальный регулятор 8, первый сумматор 9, первую цепочку интеграторов 10-12, второй сумматор 13, множительные устройства первой группы 14-16, второй группы 1719, третьей группы 20-22 и четвертой группы 23-25, вторая цепочка интеграторов 26-28, третий 29, четвертый 30 пятый 31 и шестой 32 сумматоры, сумматоры 33-35 поисковых сигналов. На чертеже также приведены следующие обозначения: 8(t) - пробный сигнал; л , JK9 I9 ,9 - выходной сигнал и первая и вторая производные выходного сигнала первой цепочки интеграторов;Х,Хп,... настраиваемые параметры; (Л ,-.-,сА( - выходные сигналы генератора поисковых сигЕГалов; -выходной сигнал модели; -сигнал ошибки; -выходной сигнал объекта идентификации;in(t) - выходной сигнал второй цепочки интеграторов. Структурной схеме модели 2, приведенной на чертеже, соответствует следую щая нестационарная система дифферен- 1щальнь|х уравнейий, записанных в операторной форме ,/ (Pix))e(t), (1) y(t),x+(Я)),(I) Q(p,X4(H)f ) дъ) (P,X), °(Q-p)fg (4) Система работает следующим образом Пробный сигнал 9(t} , подвергаясь воздействию оператора (Г (Р,Х)( реализуемого первой цепочкой интеграто ров 1О-12, первым сумматором 9, а также множительными устройствами первой группы 14-16-и вторым сумматором 13, формирует сигнал ) . При этом числитель R(Р, А) передаточной функции (PI Х) реализуется путем суммирования с помощью, третьего сумматора 29 производных 0 (t) и § (t) сигнала б Ш и самого сигнала 6(t) с коэффициентами, определяемыми сигналами, поданными на вторые входы устройств 14-19 первой и второй групп. Эти производные вместе с сигналом 8(t) снимаются с выходов интеграторов 1О-12 первой цепочки, реализующей оператор 0 (Р|Х). Посредством сумматоров поисковых сигналов 33-35 и множительных устрой ств 2О-22 третьей группы параметрам Х...Х передаточной функции Ф„ (P| X) сообщаются поисковые колебания (-Ь). «.сЛХ(, (t) ..В результате выходной сигнал модели f git) , являющийся выходным сигналом шестого сумматора, оказывается промодулированным выходными сигналами генератора поисковых сигналов. На выходе элемента 3 сравнения формируется сигнал ошибки 6(t:} Sttit) -f д(1) , где fflW - выходной сигнал объекта идентификации. Сигнал ошибки в амплитудном детекторе 4 преобразуется в ). Блоки формирования параметрических управлений представляют собой последовательное соединение синхронного детектора, выходной сигнал которого равен t(i) OCOS 51 (i) , и астатического фильтра. ОА Данную систему идентификации целесообразно использовать для самонастройки обучаемой модели в тех случаях, когда в связи со значит.ельным количеством настраиваемых параметров, сложностью реализагши вспомогательных операторов, трудностью (или невозможностью) измерения пробного сигнала самонастраивающейся системы, использующиеся вспомогательные операторы оказываются неэффективными, а известные типы поисковых систем не обеспечивают требуемых динамических характеристик, точности или помехоустойчивости. В данной системе обеспечивается выбор поисковых частот из значительно более широкого, чем в известном устройстве, диапазона, что позволяет за счет их повьпиения добиться улучшения быстродействия без одновременного снижения точности, а также отстраиваться от помех, выбирая поисковые сигналы, лежащие вне спектра последних. Формула изобретения Система автоматической идентификации, содержащая генератор поисковых сигналов, источник пробного сигнала, выход которого подключен к входу объекта идентификации и к первому входу первого сумматора, выход которого подключен к входу первой цепочки последовательно соединенных интеграторов, выход каждого из которых подключен к первому входу соответствуюшего множительного уст ройстда первой группы и к первому входу соответствующего множительного устройства второй группы, выходы множительных устройств первой и второй групп соединены соответственно с входами второго и третьего сумматоров, выход . второго сумматора соединен с вторым входом первого сумматора, элемент сравнения, первый вход которого соединен с выходом объекта идентификации, а выход через амплитудный детектор подключен к первым входам «блоков формирования параметрических управлений первой и второй групп, выход каждого блока формирования параметрических управлений второй группы через соответствующий сумматор поисковых сигналов соединен с входом соответствующего множительного устройства второй группы, второй вход соответствующего сумматора поисковых сигналов соединен с вторЫм входом соответствуюшего блока
формирования параметрического управления второй грутиы, вторые входы соответствующих блоков фбрмярования параметрических управлений соединены с соответствующими выходами генератора поисковых сигналов, отличаю-, ш а я с я тем, тго, с целью, повышения точности идентификации и расширения области применения, в нее введены четвертый, пятый и шестой сумматоры, вторая цепочка последовательно соединенных интеграторов, а также третья и четвертая группы Множительных устройст причем первый йход четвертого сумматора соединен с выходом третьего сумматора, а выход - с входом второй цепочки последовательно соединенных интеграторов, выход каждого из которых соединен с первым входом соответствующего множительного устройства третьей группы и с перв1з1м входом соответствующего множительного устройства четвертой группы, выходы множительных устройств третьей и четвертой групп соединены соответственно с входами пястого и шеетого сумматоров, выходы которых соединены соответственно с вторым и третьим входами четвертого сумматора, вторые входы Соответствующих множительных
устройств первой и четвертой групп соединены с соответствующими выходами блоков формирования параметрических управлений первой хруппы, вторые входы
соответствующих множительных устройст третьей группы соединены с вторыми входами соответствующих блоков формирования параметрического управления первой группы, второй вход элемента сравнения соединен с выходом шестого
сумматора.
I
Источники информации, принятые во внимание при экспертизе
I Международного конгресса ИФАК по авматическому управлению. Теория дискретных оптимальных и самонастраивающихся систем, Наука, 1961, с. 963973 (прототип).
