129
поступают на входы cyMMaav- a 7. При этом квадрированный сигнал цепи блока умножения предварительно умножается в блоке 14 умножения на коэффициент корреляции R (о) между отфильт- и 1
рованными сигналами, вычисляемьй на блоке 13 измерения коэффициента корреляции. Благодаря этому повышается точность определения коэффициента усиления объекта kj, , формируемого на выходе интегратора 8, который интегрирует разность квадрированных сигнаИзобретение относится к устройствам контроля и может-быть использовано в приборах, предназначенных для получения информации о коэффициенте усиления объектов преимущественно первого порядка в системах автоматического контроля, а также в
самонастраивающихся системах с настройкой коэффициента усиления.
Целью изобретения является повышение точности и расширения функциональных возможностей устройства при случайном входном воздействии
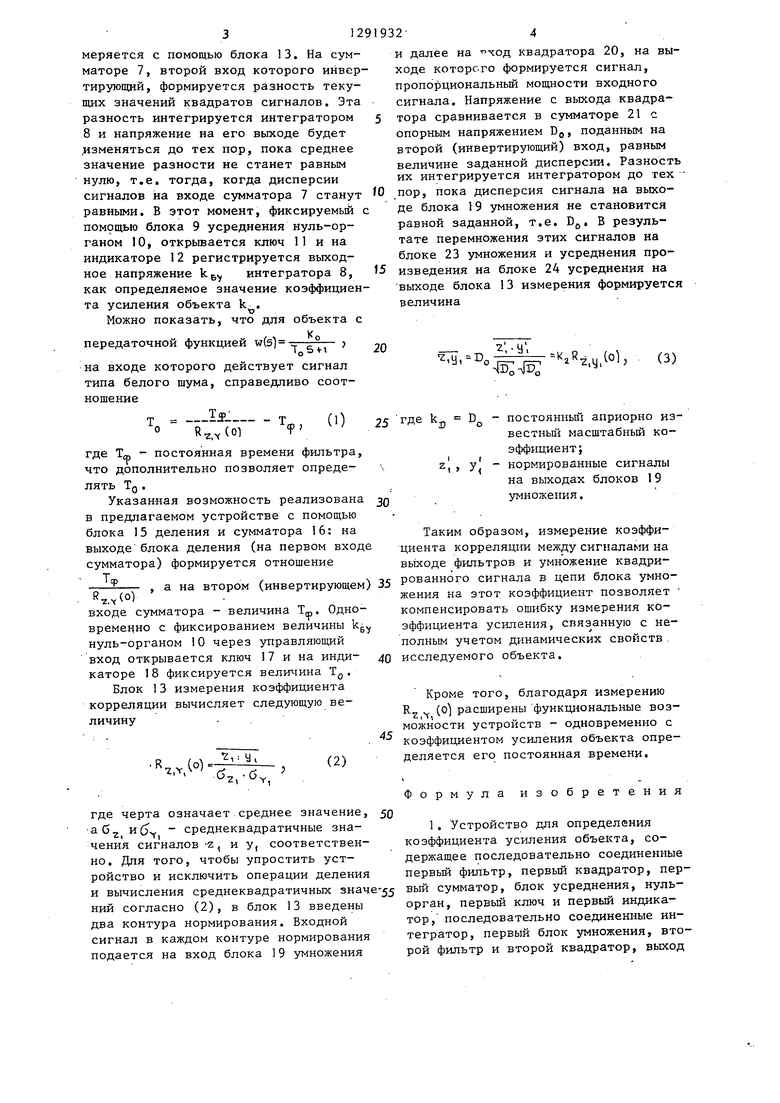
На фиг,1 и 2 приведены соответственно блок-схема устройства и блок- схема блока измерения коэффициента корреляции.
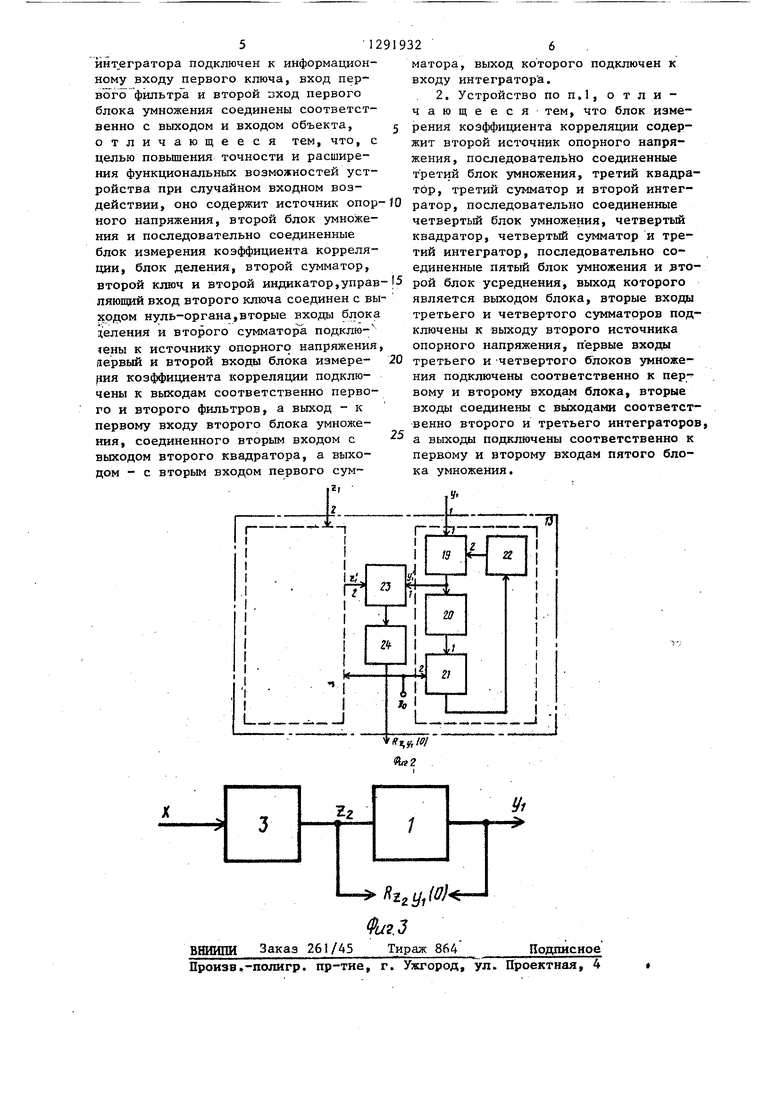
УстройствоСфиг.1-3}содержит ис- йледуемьй объект 1, первый блок 2 умножения, первый 3 и второй 4 фильтры. Первый 5.и второй 6 квадраторы, первый сумматор 7, интегратор 8, блок 9 усреднения, нуль-орган 10, первый ключ 11, первый индикатор 12, блок 13 измерения коэффициента корреляции, второй блок 14 умножения, блок 15 деления, второй сумматор 16, второй ключ 17, второй индикатор 18. Кроме того, на фиг,1 введено следующее обозначение: Тт - выход первого источника опорного, напряжения.
Блок измерения коэффициента корреляции содержит третий блок 19 умножения, третий квадратор 20, третий сумматор 2, второй интегратор 22 (эти блоки входят в состав первого контура нормирования), второй контур .включает четвертый блок умножения.
932
лов, поступающую с выхода сумматора 7. Одновременно с помощью блока 15 деления и сумматора 16 определяется постоянная времени объекта Т , Регистрация kj, и Тд производится на индикаторах 12 и 18 соответственно в момент, когда среднее значение разности квадрированных сигналов приближается к нулю. Этот момент фиксируется с помощью блока 9 усреднения, нуль-органа 10 и ключей 11, 17. 1 3,п, ф-лы, 3 ил,
четвертьш квадратор, четвертый сумматор и третий интегратор (не пока- заны), пятый блок 23 умножения и второй блок 24 усреднения. На фиг,2 введены следующие обозначения: у , Z, - первый и второй входы блока, D - выход второго источника опорного напряжения, R, (0) - выход блока,
Устройство для определения коэффициента усиления объекта работает следующим образЬм.
Входной случайный сигнал х поступает одновременно на исследуемый объект 1, фз -нкционирующий в частности в режиме нормальной эксплуатации, и блок 2 умножения.
Входной X и выходной у сигналы
объектов не обязательно должны являться соответственно входным и выходным сигналами системы, в которую входит исследУемьш объект. Необходима лишь возможность ввода этих
сигналов в предлагаемое устройство, работа которого не влияет на функционирование системы. Выходные сигналы X объекта 1 и блока 2 умножения z фильтруютс:я В идентичных фильтрах 3
и 4 нижних частот, квадрируются на квадраторах 5 и 6 и в виде текущей мощности сигнала поступают на входы сумматора 7. При этом квадрированный сигнал цепи блока умножения предварительно умножается с помощью блока 14 умножения на коэффициент корреляции RV.,(O) между сигналами у,
1 11
и z, с выходов фильтров, который измеряется с помощью блока 13. На сумматоре 7, второй вход которого инвертирующий, формируется разность текущих значений квадратов сигналов. Эта разность интегрируется интегратором 8 и напряжение на его выходе будет изменяться до тех пор, пока среднее значение разности не станет равным нулю, т.е. тогда, когда дисперсии сигналов на входе сумматора 7 станут равными, В этот момент, фиксируемый с помощью блока 9 усреднения нуль-органом 10, открывается ключ 11 и на индикаторе 12 регистрируется выходное напряжение kg-y интегратора 8, как определяемое значение коэффициента усиления объекта k ,
t
Можно показать, что для объекта с
W передаточной функцией w(5)-
Т„5м
на входе которого действует сигнал типа белого шума, справедливо соотношение
Т :Is.X
° R,(01 f
где TO, - постоянная времени фильтра, что дополнительно позволяет определять TQ .
Указанная возможность реализована в предлагаемом устройстве с помощью блока 15 деления и сумматора 16: на выходе блока деления (на первом вход сумматора) формируется отношение
СО
J..
Таким образом, измерение коэффициента корреляции между сигналами на вь1ходе фильтров и умножение квадриФ
на втором (инвертирующем) 35 рованного сигнала в цепи блока умно6V
RV.V(O )
входе сумматора - величина T,. Одновременно с фиксированием величины k нуль-органом 10 через управляющий вход открывается ключ 7 и на индикаторе 18 фиксируется Т . Блок 13 измерения коэффициента корреляции вычисляет следующую величину
40
жения на этот коэффициент позволяет компенсировать ошибку измерения коэффициента усиления, связ анную с неполным учетом динамических свойств исследуемого объекта.
Кроме того, благодаря измерению R (о) расширены функциональные возможности устройств - одновременно с коэффициентом усиления объекта определяется его постоянная времени.
.R
.Л,°
V,:y,
(2)
где аб.
черта означает среднее значение,
иб, среднеквадратичные знаг,
чения сигналов -z, и у, соответственно. Для того, чтобы упростить устройство и исключить операции деления и вычисления среднеквадратичных знач НИИ согласно (2), в блок 13 введены два контура нормирования. Входной сигнал в каждом контуре нормирования подается на вход блока 19 умножения
1932-4
и далее на ход квадратора 20, на выходе которого формируется сигнал, пропорциональный мощности входного сигнала. Напряжение с выхода квадра5 тора сравнивается в сумматоре 21 с опорным напряжением Dj,, поданным на второй (инвертирующий) вход, равным величине заданной дисперсии. Разность их интегрируется интегратором до тех
W пор, пока дисперсия сигнала на выходе блока 19 умножения не становится равной заданной, т,е, D, В результате перемножения этих сигналов на блоке 23 умножения и усреднения про)5 изведения на блоке 24 усреднения на выходе блока 13 измерения формируется величина
..
K,(ol,
(3)
1
D - постоянньй априорно известный масштабный коэффициент;
( У нормированные сигналы на выходах блоков 19 умножения,
Таким образом, измерение коэффициента корреляции между сигналами на вь1ходе фильтров и умножение квадрированного сигнала в цепи блока умно
жения на этот коэффициент позволяет компенсировать ошибку измерения коэффициента усиления, связ анную с неполным учетом динамических свойств исследуемого объекта.
Кроме того, благодаря измерению R (о) расширены функциональные возможности устройств - одновременно с коэффициентом усиления объекта определяется его постоянная времени.
Формула изобретения
1, Устройство для определения коэффициента усиления объекта, содержащее последовательно соединенные первый фильтр, первьш квадратор, первый сумматор, блок усреднения, нуль- орган, первьш ключ и первый индикатор, последовательно соединенные интегратор, первый блок умножения, второй фильтр и второй квадратор, выход
5 129
интегратора подключен к информационному входу первого ключа, вход первого фильтрЪ и второй 2ХОД первого блока умножения соединены соответственно с выходом и входом объекта, отличающееся тем, что, с целью повьшения точности и расширения функциональных возможностей устройства при случайном входном воз; рения коэффициента корреляции содержит второй источник опорного напряжения, последовательно соединенные третий блок умножения, третий квадра тор, третий сумматор и второй интегдействии, оно содержит источник опор-10 ратор, последовательно соединенные
ного напряжения, второй блок умножения и последовательно соединенные блок измерения коэффициента корреляции, блок деления, второй сумматор.
четвертый блок умножения, четвертый квадратор, четвертый сумматор и третий интегратор, последовательно соединенные пятый блок умножения и зто
второй ключ и второй индикатор,управ- 5 рой блок усреднения, выход которого
ляющий вход второго ключа соединен с выходом нуль-органа,вторые входы блока деления и второго сумматора подклю- 1ены к источнику опорного напряжения, первый и второй входы блока измере- рия коэффициента корреляции подключены к выходам соответственно первого и второго фильтров, а выход - к первому входу второго блока умножения, соединенного вторым входом с выходом второго квадратора, а выходом - с вторым входом первого сум|2|
Фи.3
ВНИШШ Заказ 261/45 Тираж 864
Произв.-полигр. пр-тие, г. Ужгород, ул.. Проектная, 4
9326 .
матора, выход которого подключен к входу интегратор а.
2. Устройство по п,1, о т л и - чающееся тем, что блок изме; рения коэффициента корреляции содержит второй источник опорного напряжения, последовательно соединенные третий блок умножения, третий квадратор, третий сумматор и второй интег ратор, последовательно соединенные
четвертый блок умножения, четвертый квадратор, четвертый сумматор и третий интегратор, последовательно соединенные пятый блок умножения и зторой блок усреднения, выход которого
0
5
является выходом блока, вторые входы третьего и четвертого сумматоров подключены к выходу второго источника опорного напряжения, первые входы третьего и четвертого блоков умножения подключены соответственно к пер- вому и второму входам блока, вторые входы соединены с выходами соответственно второго и третьего интеграторов, а выходы подключены соответственно к первому и второму входам пятого блока умножения.
,
Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения параметров объекта | 1987 |
|
SU1446602A1 |
| Устройство для вычисления нормированных статистических моментов случайных процессов | 1981 |
|
SU955117A1 |
| Устройство для определения коэффициента усиления объекта | 1984 |
|
SU1228080A1 |
| Устройство для вычисления нормированных статистических моментов случайных процессов | 1983 |
|
SU1120367A1 |
| КОРРЕЛЯЦИОННЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 2012 |
|
RU2501030C2 |
| Анализатор частотных характеристик | 1985 |
|
SU1307373A1 |
| Устройство для определения дисперсии | 1988 |
|
SU1640712A1 |
| Устройство для определения параметров динамического звена | 1987 |
|
SU1478194A1 |
| Устройство для определения параметров динамического звена | 1983 |
|
SU1160372A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
Изобретение может быть использовано при случайном входном воздействии, в том числе реальном. Целью изобретения является повышение точности и расширение функциональных возможностей устройства. Входной сигнал поступает одновременно на исследуемый объект 1 и блок 2 умножения. Выходные сигналы объекта и блока умножения подвергаются фильтрации на фильтрах 3,4 с постоянной времениТт квадрируются на квадраторах 5,6 и (Л С
| Пушной Б.М., Шеломанов А.Н | |||
| К эопросу об анализе качественных показателей систем регулирования при воздействиях произвольной формы | |||
| Автоматическое управление непрерывными процессами | |||
| Изд | |||
| Сиб | |||
| отд | |||
| АН СССР, вып | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Устройство для определения коэффициента усиления объекта | 1984 |
|
SU1228080A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
