(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ 4ACTOTFibIX ХАРАКТЕРИСТИК ДИНАМИЧЕСКИХ ОБЪЕКТОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения динамических характеристик линейных объектов | 1974 |
|
SU554525A1 |
| Система управления электроприводом | 1979 |
|
SU824135A1 |
| АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ НЕПРЕРЫВНЫХ ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 2007 |
|
RU2349923C1 |
| АДАПТИВНЫЙ ЭКСПРЕСС-АНАЛИЗАТОР ПАРАМЕТРОВ ШИРОКОПОЛОСНЫХ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2006 |
|
RU2316774C1 |
| СПОСОБ И СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2014 |
|
RU2559869C1 |
| УПРАВЛЯЕМЫЙ ГЕНЕРАТОР | 2012 |
|
RU2506692C1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ ПОМЕХ ДЛЯ ПРИЕМНИКОВ ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 2003 |
|
RU2253183C1 |
| Устройство для управления экстремальным объектом с неустойчивой линейной частью | 1980 |
|
SU901995A1 |
| АДАПТИВНОЕ МНОГОФУНКЦИОНАЛЬНОЕ КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ УСТРОЙСТВО | 2007 |
|
RU2353050C1 |
. : I.Изобретение откосится к области экспериментального определения частотных характеристик различного рода динамических объектов, к числу которых могут относиться системы автоматического управления и их элементы, технологические установки, электрические машины, газотеплообменные агрегаты и Т: д., характеризуемые наличием помехи значительного уровня в контролируемых сигналах. При исследовании объектов такого рода практически невозможно сформировать входное возмущающее воздействие, по форме близкое к гармоническому и не содержащее помехи, гто не позволяет задавать частоту основной гармо1йической соста;8ляющей с требуемой точностью.
Известные устройст ва для определения частотных характеристик динамических объ- ектов содержат генератор синусоидального задающего воздействия, соединенный со вхрДбм исследуемого объекта, и блоки rf3Mfrpeний амт1лцтуды и фазы на выходе объекта 1 и 12.
Такие устройства обладают низкой помехозащищенностью и, следовательно, низкой точностью определе ния частотных характеристик динамических объектов даже
в Том случае, когда на выходе исследуемого объекта присутствует помеха низкого уровня. Наиболее близким по технической сущности к предлагаемому является устройство, содержащее генератор задающего воздейс ствия, последовательно соединенные первую модель, первый блок сравнения, первый квадратор, первый интегратор и первый экстремальный регулятор, выходы которого соединены соответственно с управляющими входами первой модели, последовательно сое10 диненные вторую модель, второй блок сравнения, второй квадратор, второй интегратор и второй экстремальный регулятор, выходы которого Соединены соответственно с управ ляЮщими входами второй модели, первые . сигнальные выходы первой и второй моделей подключены к соответствующим входам блока деления, вторые сигнальные выходы первой и второй моделей - к соответствующим входам сумматора.
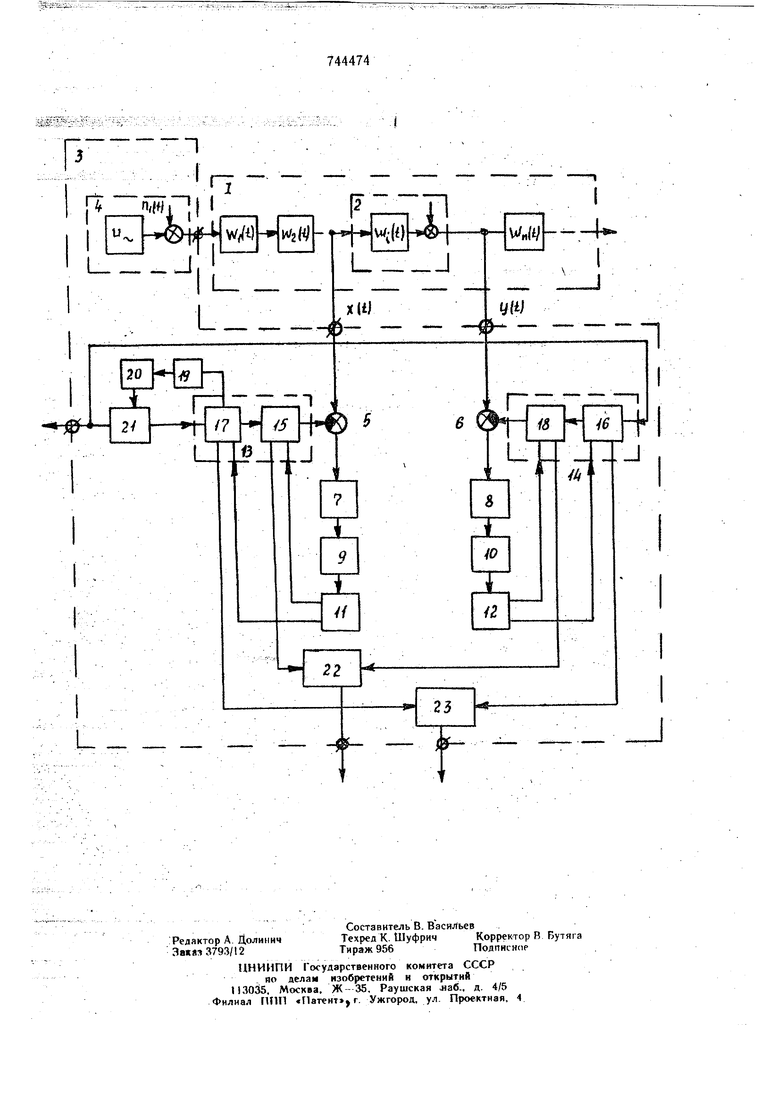
20 Известное устройство предназначено для исследования только таких объектов, которые позволяют формировать задающее воздействие, по форме близкое к гармоническому сигналу{3. Наличие во входном и выходном сигналах исследуемого объекта помех в значительной степени понижает точность известного устройства, следствием чего является сужение области его функционального применения. Цель изобретения - повышение точности и расширение области применения устройства. Поставленная цель достигается тем, что в устройстве установлены последовательно соединенные блок памяти, множнтельно-делительный блок и генератор опорного сигнала, выходы которого подключены к соответствующим входам первой и второй моделей, а вход блока памяти соединен с соответствуюшим выходом первой модели. На чертеже представлена функциональная схема устройства. Устройство содержит систему I автоматического управления, исследуемый объект 2, являюшийся одним из функциональных блоков системы автоматического управления, устройство 3 для определения частотных характеристик динамических объектов, генератор 4 задающего воздействия, первый и второй блоки 5, 6 сравнения, первый и второй квадраторы 7, 8, первый и второй интеграторы 9, 10, первый и второй экстремальные регуляторы II, 12, первая и вторая модели 13, 14, первый и второй усилители 15, 16, первый и ч ВТО рой фазосдвигающие блоки 17, 18, блок 19 памяти, множительно-делительный блок 20, генератор 21 опорного сигнала , блок 22 деления, сумматор 23 На чертеже приняты следующие обозначения: x(t) - задающее (входное) воздействие, ni(t) - помеха, присутствующая в задающем воздействии x(t); (i) - выходной сигнал исследуемого объекта, n2(t)- помеха, присутствующая в выходном сигнале Y(t) . Wi, v 2,..., Wi w - передаточные функции блоков, входящих в состав системы I автоматического управления. Устройство работает следующим образом При определении частотных характеристик на вход исследуемого объекта 2 с выхода генератора 4 : адающего воздействия подается возмущающее воздействие произвольной формы частоты й из последовательности частот(йЛ , заданной программой испы«.J таиий, которое можно представить в виде: x(t) ASin(a,)N(t), где А и ф, соответственно амплитуда и фазовый сдвиг задающего воздействия на частоте ы ; Nt(t) - сумма гармонических составляюнжх с частотами, отличными от ср; и случайной составляющей п (t). Формирователем задающего воздействия является генератор 4 и весь комплекс устройств связи и блоков системы 1 автоматического управления, участвующих в преобразовании задающего воздействия, до входа исследуемого объекта 2 На выходе объекта 2 формируется сигY(t) BSin{60i +) +Ne(t) где В и - соответственно амплитуда и фазовый сдвиг выходного сигнала на частоте Ы1, Nilt) - сумма сигнала N,i(t), преобразованного объектом, и помехи nzit), присутствующей на выходе объекта 2. Обычно в процессе испытаний входной и выходной сигналы исследуемого объекта 2 на каждой частоте фиксируются в накопителе (например, записываются на магнитную ленту) и при определении частотных характеристик на входы устройства 3 подаются записи сигналов x(t) и Y(t) длительности Т. Генератор 21 опорного сигнала формирует гармонический сигнал единичной амплитуды и нулевой фазы u(t) Sin ojjj. t, где ujji (Ot-l- Au)J, , который подается на вход первой модели 13, состоящей из усилителя 15 и фазосдвигающего блока 17. В ом случае генерато р 21 формирует модель задающего воздействия на объект 2. На выходе первой модели 13 формируется сигнал вида Z,(t) KiSinCoo,; t + ei), ,, где К и в -- соответственно, коэффициент усиления и фазовый сдвиг первой модели 13 на частоте с. Полученный выходной сигнал первой модели 13 сравнивают со входным сигналом объекта 2 в первом блоке 5 сравнения. Полученный на выходе блока 5 сравнения сигнал преобразуется в квадраторе 7 и интеграторе 9 и на вход экстремального регулятора 11 подается сигнал, пропорциональный среднеквадратич1 ой разHQcrti входных сигналов блока 5 сравнения j(T). Экстремальный регулятор 11 минимизирует величину среднеквадратичной разности путем изменения величины фазового сдвига первого фазосдвигающего блока 17 . где г - величина времени IQnaQTIUIOOUUOГ In ГТЧШЛии/ Л OTJlltfkltlJiri Ко запаздывания. Полученное значение фазового сдвига первой модели 13, соответствующее минимуму среднеквадратичной разности , (Т) запоминают в блоке 19 памяти. Затем изменяют длину наблюдаемой реализации сигнала x(t) и определяют м инимум среднеквадратичной разности S. J (Т) при длине наблюдаемой реализации Т Т. Полученное значение фазового сдвига первой модели 13, соответствующего минимуму среднеквадратичной разности sypr),. запоминают в блоке 19 памяти. Из блока 19 памяти сигнал, пропорциональный разности между двумя запомненными значениями фазового сдвига модели 13, поступает на вход м.ножительно-делительного блока 20, на в лходе которого формируется управляющий сигнал. Генератор 21 под дйствием управляющего сигнала с выхода множительно-делительного блока 20 изменяет частоту опорного сигнала U)j. Указанный процесс продолжается до тех пор, пока фазовые сдвиги первой мОдеЛи 13, зафиксированные в блоке 19 памяти при двух длинах наблюдения Г и Т, не станут равны между собой. Это служит сигналом окончания процесса поиска по частоте. Полу ченное значение частоты опорного сигнала 0)°., равное частоте со, фиксируется в генераторе 21. Значение фазового сдвига Q lпервой модели 13, полученное после окончания процесса по частоте, также фиксируется. Опорный сигнал частоты ( с генератора 21 через вторую, модель 14 подается на вход блока б сравнения, в котором сравнивается с выходным сигналом объекта 2у(1). Выходной сигнал блока 6 сравнения преобразуется в квадраторе 8 и интеграторе 10 на вход экстремального регулятора 12 поступает сигнал, пропорциональный среднеквадратичной разности входных сигналов блока 6 сравнения (Т). Эстремальный регулятор 12 минимизирует величину среднеквадратичной разности путем изменения величины фазового сдвига второго фазосдвигающего блока 1801 , где тг - величина времени запаздывания. Полученное значение фазового сдвига Эг второй модели 14, соответствую1цее уинимуму среднеквадратичной разности (Т) фиксируют. Зафиксированные значения фазовых сдвигов 6t и 02 моделей 13 и 14 подаются на сумматор 23, в котором определяется фазовый сдвиг fg объекта 2 на частоте -oj; равной- ,. РО - Р в,-0. После окончания поиска фазового сдвига ф, объекта 2 производится поиск его коэффициента усиления на частоте ш;,. При этом изменяются коэффициенты усиления первой и второй моделей 13 и 14 до тех пор, пока не будут достигнуты минимумы сигналов на входах экстремальных регуляторов J1 и 12. Значение коэффициента усиления первой модели К° Л и значен 1е коэффициента усиления второй моден К t В, соответствующие минимумамсреднеквадратичных разностей j(T) и S(T), фиксируют. Зафиксированные значения коэффициентов усиления первой и второй моделей 13 и 14 поступают на входы блока 22 деления, в котором определяется коэффициент усиления объекта 2 на частоте со. «л,;,равный В к А Указанные отличительные особенности позволяют скомпенсировать влияние помех. присутствующих во входном и выходном сигналах и за счет этого повысить точность устройства на порядок. Применение устройства позволяет значительно упростить технические средства, необходимые для проведения Частотных испытаний, поскольку в данном случае не требуется аппаратура для формирования гармонического задающего воздействия. Кроме того, в ряде практически важных случаев в процессе испытаний гармоническое задающее воздействие вообще не удается сформировать по техническим причинам. Известные устройства в таких случаях не применимы. Указанные обстоятельства позволяют сделать заключение о расширении области применения устройства. Формула изобретения Устройство для определения частотных характеристик динамических объектов, содержащее генератор задающего воздействия, последовательно соединённые первую модель, первый блок сравнения, первый квадратор, первый интегратор и первый экстремальный регулятор, выходы которого соединены соответственно с управляющими входами первой модели, последовательно соединенные вторую модель, второй блок сравнения, второй квадратор, второй интегратор и второй экстремальный регулятор, выходы которого соединены соответственно с управляющими входами второй модели, первые сигнальные выходы первой и второй моделей подключены к соответствующим входам блока деления, вторые сигнальные выходы первой и второй моделей - к соответствующим входам сумматора, отличающееся тем, что, с целью повышения точности и расщирения области применения устройства, в нем установлены последовательно соединенные блок памяти, множительно-делительный блок и генератор опорного сигнала, выходы которого подключены к соответствующим входам первой и второй моделей, а вход блока памяти соединен с соответствующим выхоом первой модели. Источники Информации, принятые во внимание при экспертизе 1. Вавилов А. А. и др. Экспериментальое определение частотных характеристик втоматических систем. М.-Л., Госэнергоздат, 1963, с. 106-107. 2.Леонов Ю. П. и др. Применение стаических методов для определения характеистик рбъектов.Автоматика и телемеханика oiH XX, № 9, 1959. 3.Авторское свидетельство СССР 554525, кл. G 05 В 13/02, 1974 (прототип).
