(54) КАЧАЮЩИЕСЯ ЛЕТУЧИЕ НОЖНИЦЫ

| название | год | авторы | номер документа |
|---|---|---|---|
| Маятниковые ножницы | 1975 |
|
SU569406A1 |
| Барабанные летучие ножницы | 1976 |
|
SU656755A1 |
| Комбинированные ножницы | 1985 |
|
SU1286350A1 |
| Летучие ножницы | 1977 |
|
SU742054A1 |
| Летучие ножницы для резки полосового материала | 1979 |
|
SU897423A1 |
| Ножницы для резки листа | 1978 |
|
SU837612A1 |
| МАШИНА ДЛЯ ИЗГОТОВЛЕНИЯ ПРОСЕЧНО-ВЫТЯЖНОЙ СЕТКИ ИЗ ЛИСТОВОГО МАТЕРИАЛА | 2005 |
|
RU2281180C1 |
| Ножницы для резки листа | 1976 |
|
SU763043A1 |
| Летучие ножницы | 1975 |
|
SU541598A1 |
| Летучие ножницы | 1986 |
|
SU1368116A1 |
.V - ;
Изобретение относится к области обра боткн металлов давлением и может быть использовано в машиностроении.
. Известны качающиеся летучие ножницы jrij, содержащие суппорт с ножом, перемешающийся в качающейся раме, несуше; нож и связанной с главным приводным валом, механизмом регулировки амплитуды ее кача ния и с Вспомогательным :валом, связаннь1м через,регулируемые эксцентрики 1 срёдукторами, дополнительный вспомогательный вал и дифференциалы. Ножницы имеют сложную конструкцию и плохие скоростные показатели.,,.
. , . , Известны качающиеся летучие ножницы {2J, содержащие -суппорт с ножом, перемешающийся в качающейся раме, несущей нож и связанной с главным привош ым эксцентриковым валом, механизмом регулировки амплитуды ее качания и с вспомогательным валом, и зубчатую передачу, шатун.
Такие ножницы также сложны по конструкции, имеют большие маховые массы и I на позволяют осуществить дистанционное
управление изменением амплитуды качания рамы.
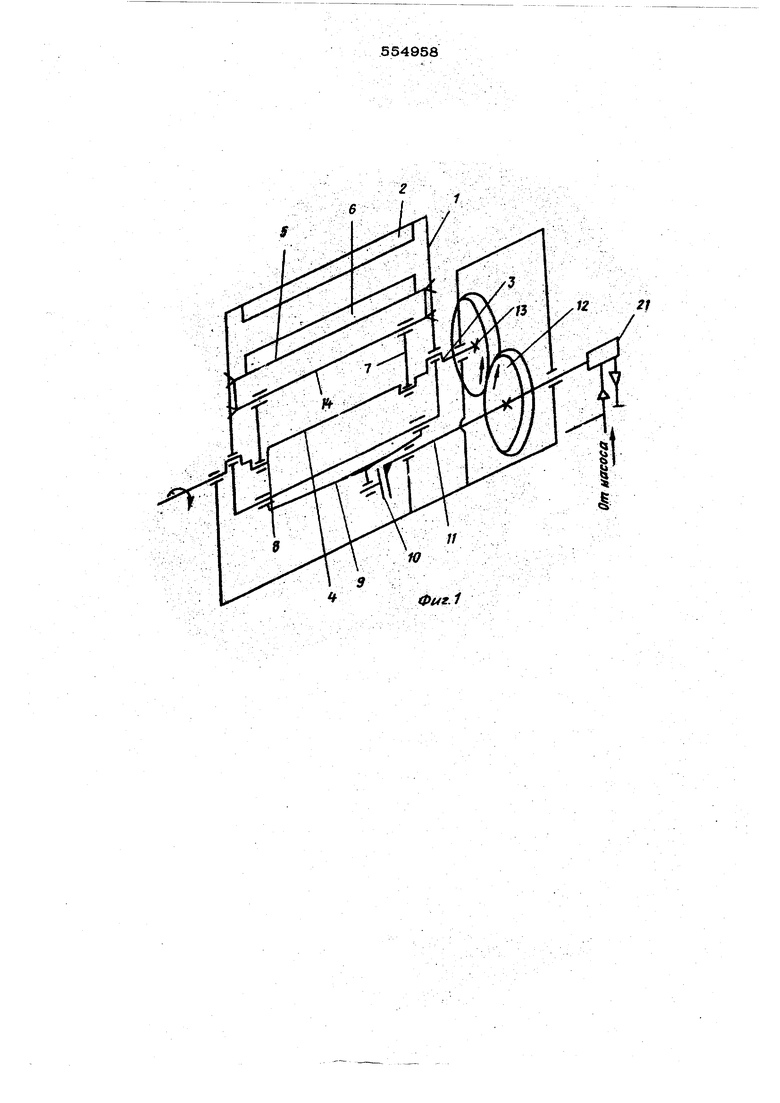
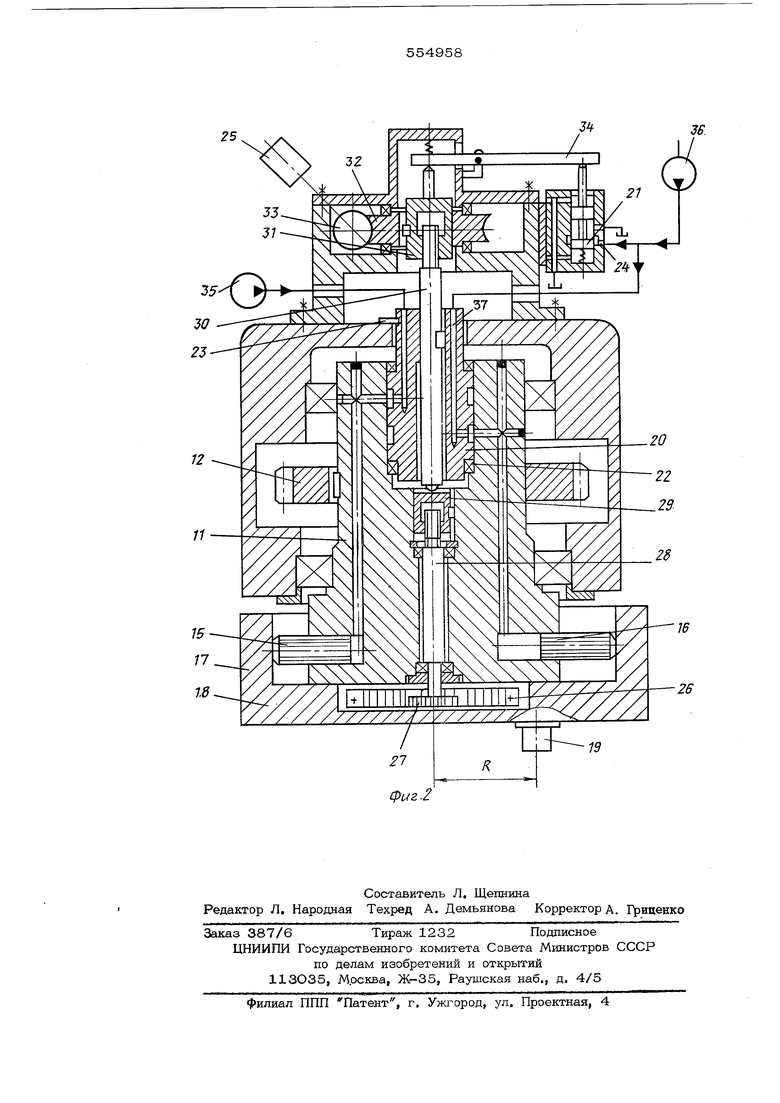
С целью повшаения производит эльн ости за счет уменьш ия маховых масс и упро щения . конструкция ножниц главный привод- ;ной эксцентриковый вал связан посредством i зубчатой передачи со вспомогательным ва- )лом, вьтолненным в виде составного пусто телого вращающегося крйвощипа, в котором смонтирован механизм регулировки ампли|туды качания рамы, взаимодействующий посредством щатуна, выполненного вилкооб: разным, с качающейся рамой. : С целью обеспечения автоматической I настройки ножниц на ходу механизм; регу- лировки амплитуды качания рамы выполнен I в виде двух гидроцилин/ ров, взаимодейс:твуж|щих с противоположными бортами диска, на I торце которого закреплен палец аксцентри ;но продольной его оси, и гидравлически сое|Диненных со следящим золотником, кинематически связанным с электродвигателем, : С целью обеспечения надежной фиксации I диска в заданном положении механизм реI гулирОБки амплитуды качания рамы снабжен механической обратной связью, выполненной в виде рейки, закрепленной на диске и взаимодействующей со следящим золотником посредством шестерни и винтовых пар. На фиг, 1 изображены ножницы; на фиг, вспомогательный вал с механизмом регулировки амплитуды качания рамы. Качающаяся рама 1 с верхним ножом 2 шарнирно связа 1а с парой эксцентриков 3 главного вала 4, соедине1шого с приводом и смонтированного в станине. Суппорт 5 с нижним ножом 6 при помощи шатунов 7 св зан со второй парой эксцентриков 8 главного вала, направленных диаметрально про тивоположно эксцентрикам 3, перемещается в направляющих качающейся рамы 1, которая своей нижней частью соединена вилкоо разным шатуном 9 с механизмом 10 регулировки амплитуды качания рамы. Послед НИИ смонтирован на вспомогательном валу 11, выполненном в виде составного пустотелого вращающегося кривошипа, связанного с главным эксцентриковым валом 4 зубчатыми колесами 12 и 13, имеющими передаточное число, равное единице. Связь суппорта 5 с шатунами 7 осуществлена осью 14, связанной с механизмом пропуск реза ( на чертеже не показан). Механизм регулировки амплитуды качания рамы выполнен;в виде двух гидроцилиндров 15 и 16, смонтированных во вспо могательном валу 11 и взаимодействующих с бортами 17 диска 18, на торце которого эксцентрично относительно продольной оси закреплен палец 19, Вал 11 передает крутящий момент от главного вала 4 к диску 18, вращающемуся вместе с ним. Гидроцилиндры 15 и 16 гидравлически соединены через золотниковый подвод 20 со следящим золотником 21, Золотниковый подвод смонтирован в валу 11 на подшипниках 22 и фиксируется от проворота шпон кой 23, Следящий золотник 21 работает по прин ципу дросселирования рабочей жидкости через рабочее окно 24 на слив, вследствие чего меняется давление в магистрали и в цилиндре 15, и кинематически связан с электродвигателем 25, Механизм регулирования амплитуды качания рамы содержит механическую обратную связь, вътолненную в виде рейки 26, жестко закрепленной на диске 18 и взаимодействующей со следящим золотником 21 через шестерню 27, Последняя жестко закреплена на конце винта 28 с гййкой 29 , контактирующей с винтом 30 гайки 31, установленной с возможностью продольного перемещения в колесе 32 червячной пары 33, Гайка 31 контактирует с коромыслом 34, другой конец которого взаимодействует со следящим золотником 21, Качающиеся летучие ножницы работают в режиме непрерывного вращения. Разрезаемая полоса подается равномерно вращающимися задающими роликами или правильной машиной ( на чертеже не показаны), связанными одним общим приводом с ножницами. Изменение длины отрезаемых листов осуществляется включением требуемого передаточного отношения коробки скоростей (вариатора), установленной в приводе ножниц между задающими роликами и ножницами, с одновременной соответствующей регулировкой амплитуды колебания качающейся рамы ножниц. После получения на цифровом табло ( на чертеже не показано) данных о длине отрезанных листов предусматривается автоматическая или дистанционная подрегулировка амплитуды рамы на ходу машины J с тем, чтобы синхронизация и, соответственно, длина листов были доведены до заданной величины. Главный приводной вал 4 имеет вращение. согласованное со скоростью полосы и заданной длиной реза, и своими эксцентриками 3 и 8 сообщает ножам 2 и 6 движение, необходимое для осуществления реза. Одновременно с этим вращение от главного вала 4 через зубчатые колеса 12 и 13 передается вспомогательному валу 11, который пальцем 19 механизма 10 через вилкообразный щатун 9 сообщает качание раме 1 со скоростью, синхронной скорости разрезаемой полосы. Указанная синхрониза ция достигается установкой требуемой величины амплитуды качания рамы 1 за счет соответствующей настройки величины радиуса R пальца 1 9, Изменение положения диска 18 и удержание его в заданном положении осуществляется цилиндрами 15 и 16, Рабочая полость цилиндра 15 соединена через золотниковый подвод 20 с трубопроводом постоянного давления насоса 35, а рабочая полость цилиндра 16 - с трубопроводом нагнетания насоса 36, Давление последнего регулируется следящим золотником 21, В процессе работы ножниц на палец 19 действуют непрерывно изменяющиеся силы, возникающие от качания рамы ножниц, и усилие, развиваемое цилиидром 15. Указанные силы должны уравновешиваться усилием , развиваемым цилиндром 16, давление в котором также непрерывно изменяется следящей системой ножниц. Только при наличии равновесия указанных сил радиус R
пальца кривошипа будет равен заданной величине.
Для изменения амплитуды колебания рамы ножниц необходимо изменить величину радиуса R пальца 19.
Дистанционное или автоматическое изменение радиуса R пальца кривошипа осуществляется включением электродвигателя 25, который вращает червяк 33 и червячное колесо 32,
Совместно с червячным колесом 32 вращается гайка 31, которая вкручиваясь или выкручиваясь из винта 30, перемещается в осевом направлении, изменяя положение коромысла 34 и соответственно- положени следящего золотника 21. Изменение положения последнего вызовет изменение величины рабочего окна 24, что приведет к изменению давления в трубопроводе насоса 37 и, соответственно - в рабочей полости цилиндра 16.
При открывании окна 24 давление насоса 36 будет падать, а при закрывании повышаться. Изменение положения следящего золотника вызовет изменение давления в рабочей полости цилиндра 16 при этом диск 8 начнет перемещаться в соответствующую сторону, изменяя величину R пальца 19.
Однако любое перемещение диска 18 передается через рейку 26 на шестерню 27 Последняя, поворачиваясь, вызовет одновреме1шо поворот винта 28, что приведет к осевому изменению положения гайки 29 и соответственно, изменению положения коромысла 34 и золотника 21. При этом заданный сигнал от электродвигателя 25 компенсируется отработкой обратной связи и снова наступает равновесие сил на пальце кривошипа в заданном (новом) положении.
После выведения пальца 19 на заданный радиус R следящая система автоматически поддерживает величину R с большой точностью. Любое изменение равновесия сил, действующих на палец 19, вызовет перемещение диска 18 с рейкой 26, которая повернет шестерню 27. При этом отработка обратной связи вызовет изменение положения следящего золотника 21, что приведет к изменению давления в цилиндре 16 и, соответственно, к созданию равновесия сил на пальце 19, т.е. к сохранению величины выбранного радиуса с большой точностью.
Устройство вспомогательного вала позволяет с высокой точностью изменять ра-
диус кривошипа дистанционно и без остановки ножниц, что необходимо для увеличения точности отрезаемых листов по длине за счет достижения точной синхронизации горизонтальной скорости ножей в зоне резания со скоростью разрезаемой полосы.
Формула изобретения
в качающейся раме, несушей нож и связанной с главным приводным эксцентриковым валом, механизмом регулировки амплитуды ее качания и с вспомогательным валом, и зубчатую передачу, шатун, о т л и ч а ющ и е с я тем, что, с целью Т1рощения конструкции и повышения производительности , главный приводной эксцентриковый вал связан посредством зубчатой передачи со вспомогательным валом, вьтолненным в виде составного пустотелого вращающегося кривошипа, в котором смонтирован механизм регулировки амплитуды качания рамы, взаимодействующий посредством шатуна, вьшолненного вилкообразным, с качающейся рамой.
Источники информации, принятые во внимание при экспертизе:
2, Механическое оборудование цехов холодной прокатки, под редакцией Химича Г, Л,,М., Мащиностроение, 1972 г. стр. 464, 465 рис. 253 (прототип).
Фиг.1
