Изобретение относится к измерительной технике и предназначено для измере1шя азимутального, зенит; него угла и угла установки отклонителя в процессе бурения скважины..;
Известные, устройства аналогачного назначения имеют недостаточно высокую точность измерения, сложную конструкцию и не могут быть использованы в процессе буровых работ.
Ближайшим по тех шческой сущности описываемому устройству является устройство для контроля параметров траектории скважины и направления отклонителя.
Устройство содержит корпус, датчик азимута и датчик зенитного угла и угла установки отклонителя с чувствительными элементами маятникового типа, систему подвеса и регистрирующий прибор.
Однако в таком устройстве при малых зенитньк углах точность установки нуля преобразователя в плоскость наклона невелика, так как моменты трения в осях подвеса рамки оказываются соизмеримыми с устанавливаюшим моментом от эксцеитришого груза. В результате погрешность измерения азимута при малых зенитных углах оказывается значительной, подобными устройствами можно измерять азимут скважины с зешпными
углами, большими 3-5, кроме того, наличие контактных токопередающих злемвнтов усложняет конструкцию и снижает надежность.
Целью изобретения является повышение точности и надежности при измерениях в процессе бурения.
Это достигается тем, что. датчик азимута и датчик зенитного угла и угла установки отклонителя разнесены на расстояние, исключающее взаимное влияние их магнитных систем и подвешены в опорах без трения, причем чувствительный элемент датчика азимута выполнен в виде сферы со смещенным вниз центром тяжести, снабженным постоянным магнитом, а чувствительный элемент датчика и угла установки отклонителя - в виде конуса с центром тяжести, смещенным эксцентрично относительно оси его вращения и с расположенным в нем постоянным магнитом с центром тяжести, находящимся ниже оси его качания, который служит ротором преобразователя; тем, что над :И под магнитами,размещенными в сфере и конусе,ус новлены мапшточувстйительные элементы, например феррозонды, а также тем, что отверстия для подачи и отвода воздуха к аэростатическим опорам
соединены между собой через компрессор, ресивер и приспособление для подачи сжатого воздуха,
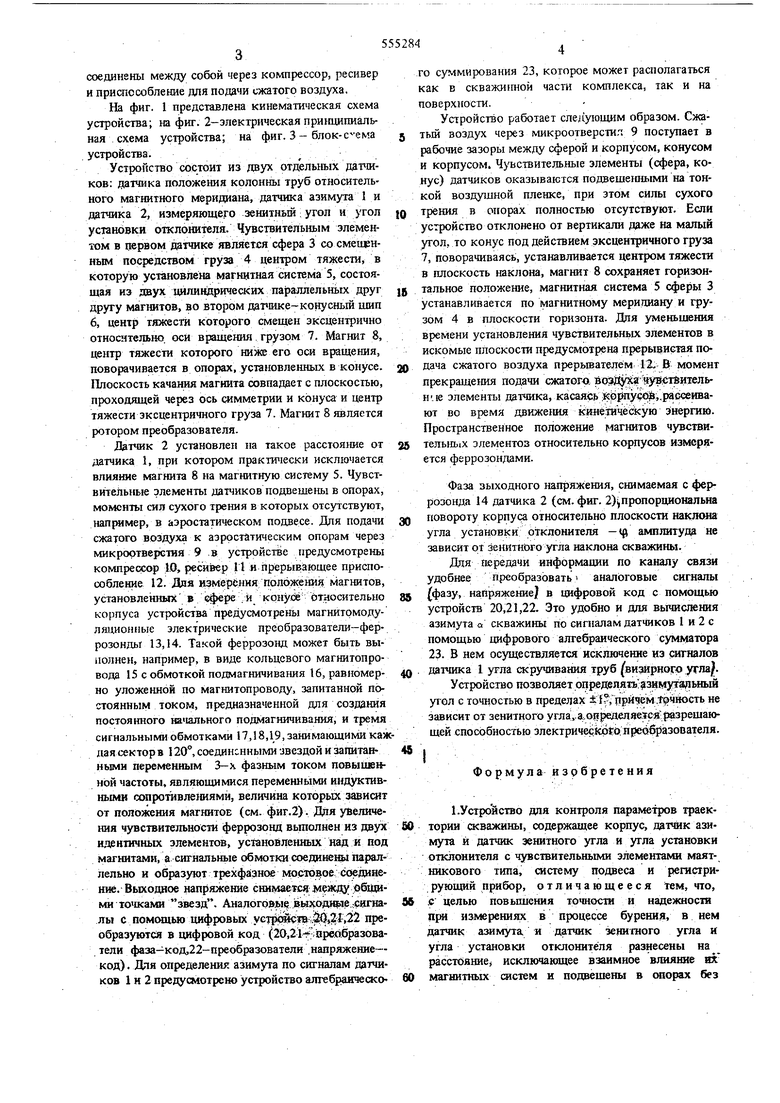
На фиг. 1 представлена кинематическая схема устройства; на фиг. 2-электрическая при1щипиальная схема устройства; на фиг. 3 - блок-с -ема устройства.
Устройство состоит из двух отдельных датчиков: датчика положения колонны труб относительного магнитного меридиана, датчика азимута 1 и датчика 2, измеряющего зенитный угол и угол установки отклонителя. Чувствителышм элементом в первом датчике является сфера 3 со смещгнным посредством груза 4 центром тяжести, в которую установлена магнитная система 5, состоящая из двух цилиндрических параллельных друг другу магнитов, во втором дат ике-конусный ишп 6, центр тяжести которого смещен эксцентрично относительно, оси вращения грузом 7. Магнит 8, центр тяжести которого ниже его оси вращения, поворачивается в опорах, установленных в конусе, Плоскость качания магнита совпадает с плоскостью, проходящей через ось симметрии и конуса и центр тяжести эксцентричного груза 7. Магнит 8 является ротором преобразователя.
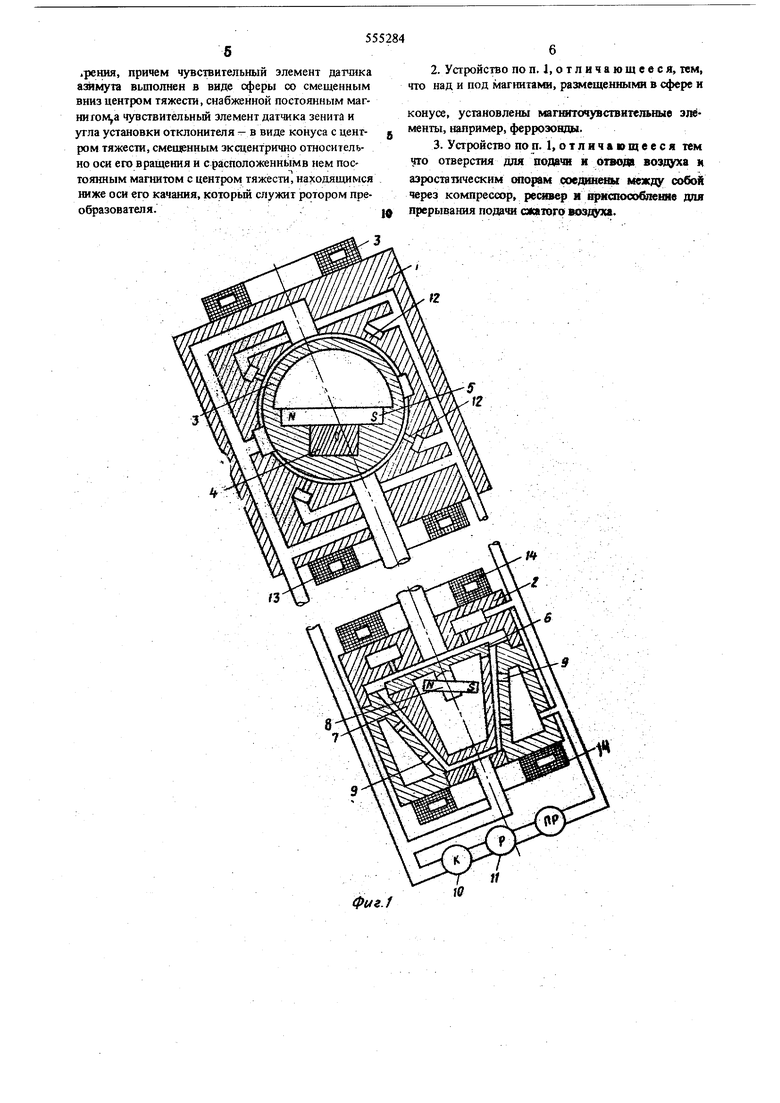
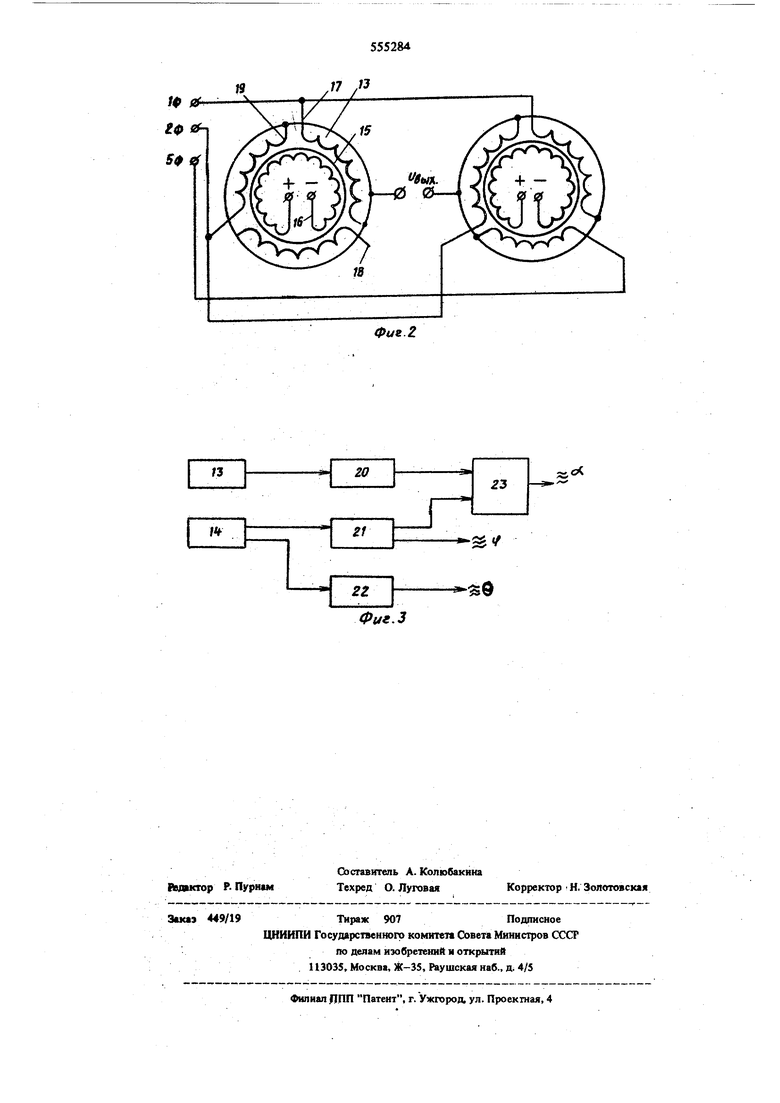
Датчик 2 установлен на такое расстояние от датчика 1, при котором практш ески исключается влияние магнита 8 на магнитную систему 5. Чувствительные элементы датчиков подвешены в опорах, моменты сил сухого трения в которых отсутствуют, например, в аэростатическом подвесе. Для подачи сжатого воздуха к аэростатическим опорам через микрортверстия 9 .в устройстве предусмотрены компрессор 1.0, 11 и прерывающее приспособление 12. Для измерения положения магнитов, установленных в ефере /и относительно корпуса устройства предусмотрены магнитрмодуляционные электрические преобразователи-феррозонды 13,14. Такой феррозонд может быть выполнен, например, в виде кольцевого магнитопровода 15 с обмоткой подмагничивання 16, равномерно уложенной по магнитопроводу, запнтанной постоянным током, предназначенной для создания постоянного начального подмагяичивання, и тремя сигнальными обмотками 17,18,19, занимающими каждая сектор в 120°, соединенными звездой и запитанными переменным 3-х фазным током повышенной частоты, являющимися переменными ннодтктивными сопрот вле1шями, величина которых зависит от положения магнитов (см. фиг.2). Для увеличения чувствительности феррозонд вьшолнен из двух идентичных элементов, установленных над и аод магнитами, а сигнальные обмотки соедннеща параллельно и образуют трехфазное мостовое соединение. Выходное напряжение снимается между Обвдими точками звезд. Аналоговые )выхаддае:сигналы с помощью цифровьк устр| та.|,2:1,22 преобразуются в цифровой код (20,21 ;ареобразователи фаза-код,22-преобразователи .напряжение- код). Для определения азимута по сигналам датчиков 1 и 2 предусмотрено устройство алгебраичеосО
о суммирования 23, которое может располагаться ак в скважи1шой части комплекса, так и на оверхности.
Устройство работает следующим образом. СУКЛьш воздух через шкpooтвepcти. 9 поступает в рабочие зазоры между сферой и корпусом, конусом и корпусом. Чувствительные элементы (сфера, конус) датчиков оказываются подвешенными на тоной воздушной пленке, при этом силы сухого трения в опорах полностью отсутствуют. Если устройство отклонено от вертикали даже на малый угол, то конус под действием зксцентричного груза 7, поворачиваясь, устанавливается центром тяжести в плоскость наклона, магнит 8 сохраняет горизонтальное положение, магнитная система 5 сферы 3 устанавливается по магнитному меридиану и грузом 4 в плоскости горизонта. Дпя уменьшения времени установления чувствительных злементов в искомые плоскости предусмотрена прерывистая подача сжатого воздуха прерьщатеде мИ, В момент прекращения подачи сжатого, воз уйе1 ительнме элементы датчика, касаясь ;к0 пу«6|8,,рассеивают во время движе1шя кинейческую энергию. Пространственное положение магнитов чувствительшлх элементов относительно корпусов измеряется феррозондами.
Фаза выходного напряжения, снимаемая с феррозонда 14 датчика 2 (см. фиг. 2)пропорциональна повороту Kopnycia относительно плоскости наклона угла установки отклонителя - ф амплитуда не зависит от зенитного угла наклона осважины.
Дця передачи информации по каналу связи удобнее преобразовать аналоговые сигналы (фазу, напряжение) в щ{фровой код с помощью устройств 20,21,22. Это удобно и для вычисления азимута о скважины по сигналам датчиков 1 и 2 с помощью цифрового алгебраического сумматора 23. В нем осуществляется исключение из :игналов датчика 1 угла скручивания труб визирного угла|Устройство позволяетрцредепять 1знму7альный угол с точностью в пределах it,причем.t 4HOCTb не зависит от зенитного угла, а определяе.тся: разрешающей способностью электричес орШ:Преобразрвателя.
/ . , : ;. , , .
Фррмула изобретения
l.ycTppiicTBo для контроля параметров траектории скважины, содержащее корпус, датчик азимута и датчик зенитного угла и угла установки отклонителя с чувствительными элементами маятникового типа, систему подвеса и регистрируюищй прибор, отличающееся тем, что, .С целью повышения точности и надежностя измерениях в процессе бурения, в нем датчик азимута и датчик зенитного угла я угла установки отклонителя разнесены на расстояние, исключаняцее взаимное влияние их магнитных систем и подвешены в (яюрах без
прения, причем чувствительный элемент датчика азимута вьтолнен в виде сферы со смещенным вниз центром тяжести, снабженной постоянным магнитом а чувствительный элемент датчика зенита и утла установки отклонителя - в виде конуса с центром тяжести, смещенным эксцентрично относительно оси его вращения и с расположенными нем постоянным магнитом с центром тяжести, находящимся ниже оси его качания, который служит ротором преобразователя..
2.Устройство по п. 1, отличающееся, тем, что над и под магнитами, размещенными в сфере и
конусе, установлены магнитсчувствигельные элементы, например, феррозонды.
3.Устройство по п. 1, отличающееся тем что отверстия для подачи и отвода воздуха н аэросташческим (мюрам ооединеиыг между собой через компрессор, ресюер и нрмспоообтюте дпя прерывания сжятго воздуха.
«
12
9
11
/Ф Я
0ue.Z
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля параметров траектории скважины | 1983 |
|
SU1155732A2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ТРАЕКТОРИИ СКВАЖИНЫ | 2008 |
|
RU2372479C1 |
| Устройство для контроля параметров траектории скважины | 1984 |
|
SU1199916A1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| ИНКЛИНОМЕТР | 1998 |
|
RU2172828C2 |
| Устройство для определения положения инструмента в скважине | 1980 |
|
SU876979A1 |
| ИНКЛИНОМЕТР (ВАРИАНТЫ) | 1998 |
|
RU2134427C1 |
| Инклинометр | 1976 |
|
SU868056A1 |
| Преобразователь зенитного угла | 1982 |
|
SU1027379A1 |
| Устройство для ориентирования отклонителя | 1985 |
|
SU1333768A1 |
Фиг,3
