(54) СПОСОБ ВЕСОВОГО ДИСКРЕТНОГО ДОЗИРОВАНИЯ МАТЕРИАЛОВ
са, который характеризуется относительно невысокой точностью соответствия весам материала во всем диапазоне измерения.
Для фиксации набора заданного значения веса и выдачи команды на прекращение подачи материала ноюльзуют второй параметр, также являющийся функцией веса, ио характеризуюищйся высокой точностью соответствия только одному значению веса - заданному.
При в формировании команды на прекращение подачи материала первый параметр может участвовать, но може и не участвовать.
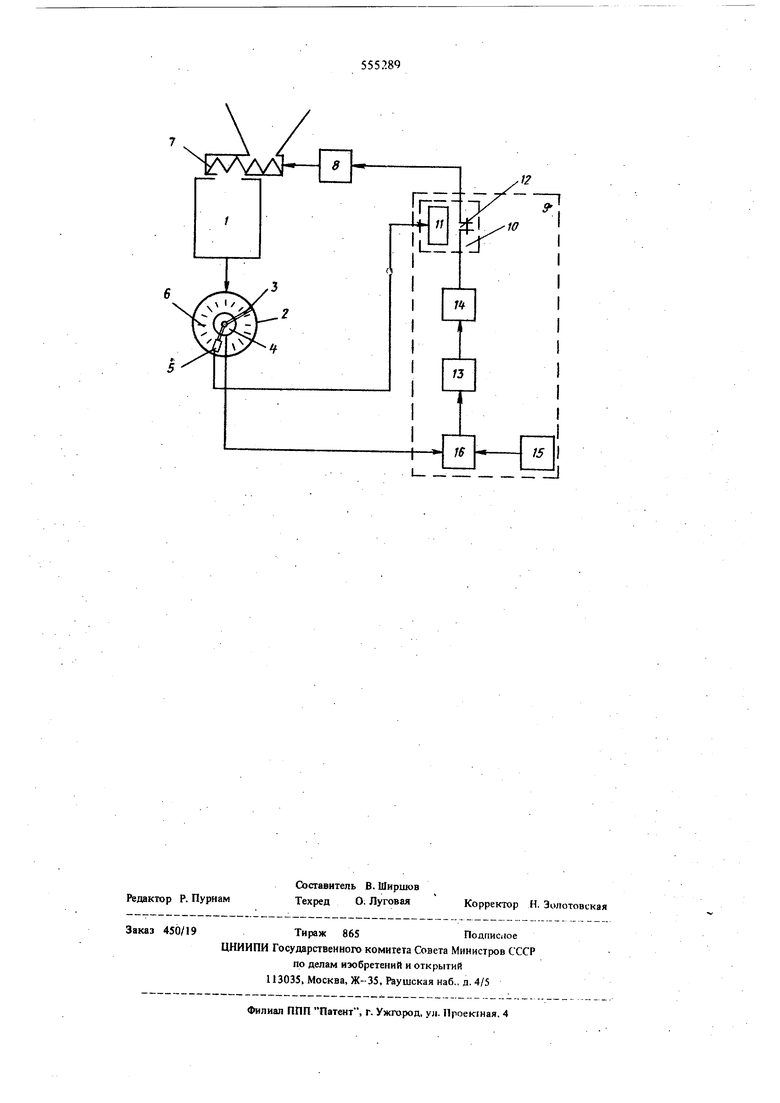
На чертеже изображена схема устройства. Устройство содержит приемную емкость 1, весоизмеритель 2 со стрелкой-индикатором 3, датчик веса (потенциометр) 4, укрепленный на оси стрелки-индикатор 3, датчик останова 5, перемещающийся по шкале 6, щнековый питатель 7 с приводом 8. Ко входу привода 8 подключен блок управления питателем 9, в состав которого входит электромагнитное реле 10, состоящее из катущки 11 и нормально закрытого контакта 12, даодный функциональный преобразователь 13 с усилителем 14, задатчик веса 15 и сумматор 16.
Устройство работает следующим образом. Перед началом цикла настраивают датчик останова 5, устанавливая; его в требуемое положение по шкале 6 и настраивают задатчик веса 15. При поступлении материала в приемную емкость 1 в соответствии с весом перемещается стрелка-индикатор 3. При этом на выходе датчика веса 4, связанного со- стрелкой - индикатором 3, появляется напряжение, про17орциона;тьное углу поворота стрелки-индикатора 3 и, следовательно, весу материала в приемной емко ти дозатора 1. Это напряжение поступает на сумматор 16, где вычитается из напряжения задатчика веса 15. Напряжение, пропорциональное разности заданного и фактического веса, поступает с выхода сумматора 16 на вход диодного функционального преобразователя J3. На диодном функциональном преобразователе 13 реализуется зависимость скорости питателя 7 от разности заданного и фактического веса, близкая к оптимальной. Сигнал с выхода дно/того функционального преобразователя 13 через усилитель 14 и нормально закрытый контакт 12 постзшает на вход привода 8. Таким образом, скорюсть ишека 7 убывает с уменьшением разности заданного и фактического веса в приемной
емкости 1. При равенстве заданного и фактического веса стрелка-индикатор 3 совмещается с датчиком останова 5, который подает сигнал на катущку реле 11, при зтом размыкается контакт 12 и привод 8 останавливает питатель 7, подача материала в приемную емкость прекращается.
Тахим образом, сущность способа состоит в том, что вес приемной емкости преобразуют в две характеристики одного и того же или различных процессов, одну из характеристик используют для задач, связанных с повыщением точности операций взвешивания и управления подающим устройством, вторую только для останова (прекращения работы подающего устройства. Этим достигается повышение точности преобразования лишь одного, но наиболее существенно влияющего на точность дозирования значения веса, что повышает точность дозирования. .
Формула изобретения
Способ весового дискретного дозирования материалов путем слежения за весом материала в приемной и управления производительностью питателя, подающего материал в приемную емкость в зависимости от изменения одного из параметров, являющегося непрерывной функцией веса материала в приемной( емкости, отличающийся тем, что, с целью повышения точности, команду на прекращение подачи материала подают при равенстве заданному значению веса другого параметра, также являющегося фукцией веса.
Источники информации, принятые во внимание при экспертизе:
1.Карпин Е.Б. Средства автоматизации для измерения и дозирования массы, М. Мащиностроение 1971. с 334-350.
2.Патент Франции №2088607 кл. G 01 g 17/00 1972.
3.Патент ФРГ № 1264087 кл. 42 f 32/02, 1968.
4.Орлов В.В. Автоматизация процессов измерения массы,Алма-Ата, Казахстан, 1971. с. 34-36.
5.Патент Великобритании № 1131305, кл. G 1 W 1968.
6.Авторское свидетельство СССР N 315050,. М.Кл.С010 13/24,1969 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления питателемВЕСОВОгО пОРциОННОгО дОзАТОРА | 1979 |
|
SU851108A1 |
| Способ управления порционным дозатором | 1985 |
|
SU1280332A1 |
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1987 |
|
SU1516792A1 |
| Устройство управления весовым дискретным дозированием сыпучих материалов | 1984 |
|
SU1216662A1 |
| УСТРОЙСТВО | 1973 |
|
SU392467A1 |
| Весовой дозатор дискретного действия | 1974 |
|
SU493647A1 |
| Весовой дозатор непрерывного действия | 1984 |
|
SU1174769A1 |
| Способ весового дозирования и устройство для его осуществления | 1987 |
|
SU1629759A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ и УПРАВЛЕНИЯ ДОЗИРОВАНИЕГЛ КОМПОНЕНТОВ СМЕСИ | 1973 |
|
SU392350A1 |
| АВТОМАТИЧЕСКОЕ ВЕСОВОЕ ЗАГРУЗОЧНОЕ И ДОЗИРУЮЩЕЕУСТРОЙСТВО | 1967 |
|
SU191846A1 |