Известны автоматические весовые загрузочные и дозируюнше устройства с циферблатным указателем, содержащие подвижной циферблат с датчиками, взанмодействующимн со стрелкой весов и включенными в цепь управления питателем, задатчик и датчик угла поворота подвижного циферблата, включенные в цеШ) управления нриводом носле.а,него.
Предлагаемое автоматическое весовое загрузочное Н дозирующее устройство отличается от известных тем, что в нем вторичный прибор, определяющий действительное количество фактически загруженного материала, подключен к датчику угла поворота гюдвижноге циферблата через датчики, установлеииые на последнем и взаимодействующие со стрелкой весов в ее исходном положении и после окончания подачи материала. Это позволяет точно определить дейетвнтельиое количество фактически загруженного материала. Для повышения производительности и упрощения схемы и конструкции датчики, включенные в цепь вторичного прибора, определяющего действительное количество фактически загруженного материала, установлены на подвижном циферблате со смеще -1ием но стнощению к датчику, включенному в цень управления питателя, на угол иревосходящ;1Й угол, соответст ,ующий предельному значению
разност действительного колнчества загруженного материала и нo rинaльнoгo значения порции.
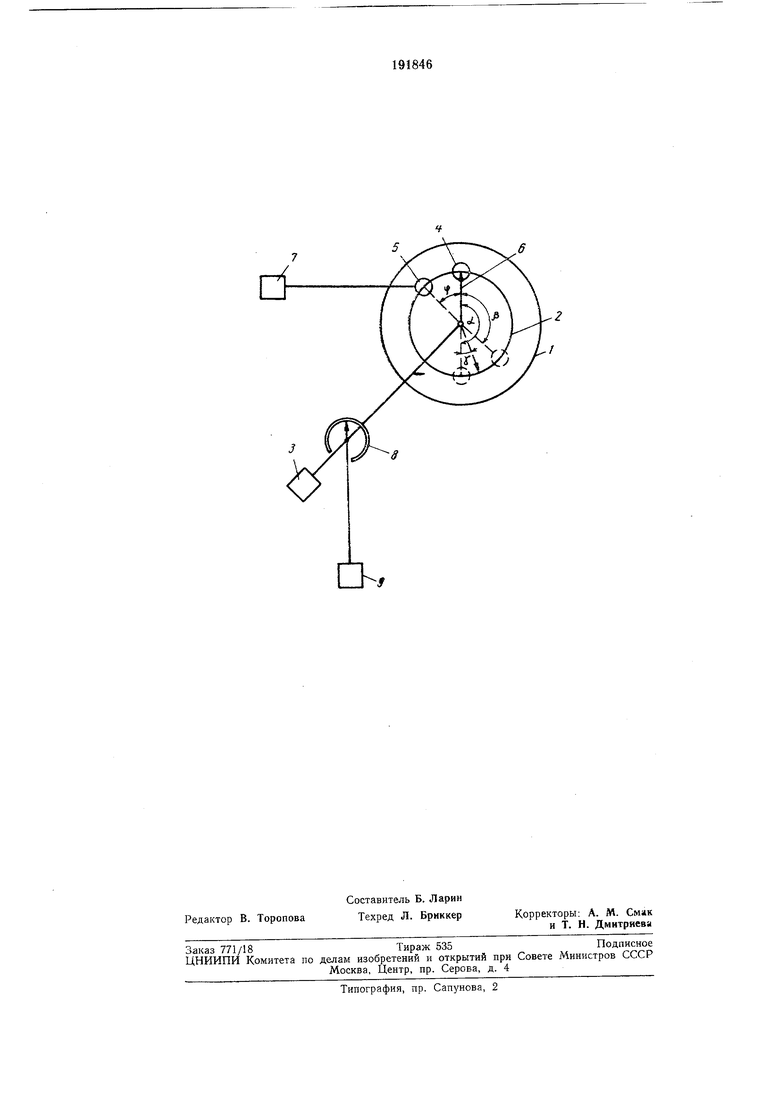
На чертеже приведена схема устройства.
Циферблатный указатель У связан с грузоприемным устройством весов и снабжен нодвижным циферблатом 2, нриводимым в движение двигателем 3. На подвижном циферблате установлены датчики 4 и 5. Датчик 4 взаимодействует со стрелкой 6 и включен 15 цепь управления питателем, подаюнитм загружаемый материал. Датчик 5 также взаимодействует со стрелкой 6 и вк.почен з цень включения и выключения вторнчаого прибора 7, служащего для определения действительного количества фактически загруженного материала. Включение ii выключение двига)еля осун ествляется системой, состоящей из датчнка 8 углового положен1 Я гтодвмжного циферблата и задатчика ,9. служащего для автоматической или ручной установки задания, для срав}ения заданного и действнтель;К)го положений подвижного циферблата и ныработки сигнала управлепия двнгателем.
Пос.те задания значения порции (т. е. yr;ia (/.i задатчиком, включается двигатель и подви/; 11ой циферблат нриходит в дьнжение вместе с ;;,атчиком 8. Когда угловое нбложение подвижного циферблата, контролируемое этим датчиком, станет равным заданному. причем датчик 4 повернется на угол а относительно исходного положения, двигатель выключится. Датчик 5, проходя .мимо стрелки, находящейся Б исходном положении, включает вторичный прибор, который отсчитывает угол поворота циферблата по сигналу, получаемому от датчика 8. По окончании движения циферблата прибор покажет угол а-ср. После остановки подвижного циферблата датчик 5 выключается и начинается загрузка грузоприемного устройства. Стрелка проходит мимо датчика 5, не оказывая на него воздействия. При взаимодействии стрелки с датчиком 4 подаются сигналы на прекращение подачи материала. Стрелка может после окончания подачи материала занять положение не доходя или переходя датчик 4 на некоторый угол Y- Действительное количество загруженного материала соответствует углу «вгйств о:-Y P + Когда дозирование закончено, включаются датчик 5 и двигатель. Начинается вращение циферблата, при котором датчик 5 взаимодействует со стрелкой и отключит вторичный прибор от датчика 5. Показания прибора будут при этом равны Р+ф-Y Т- - соответствовать авеИств Чтобы повысить быстродействие и не усложнять схему устройствами для определения направления движения подвижного циферблата после окончания дозирования в зависимости от того, с какой стороны остановилась стрелка по отношению к датчику 4, угол ф выбран так, чтобы он был заведомо больще возможных отклонений стрелки от датчика 4. Для исключения влияния изменений тарной нагрузки датчик 4 включается дополнительно в цепь управления двигателем и после смещения стрелки из нулевого положения вклю510 15 20 25 30 35 40 чает двигатель, заставляя вращаться циферблат 2 до совмещения датчика 4 со стрелкой, занимающей положение, соответствующее изменению тарной нагрузки. При этом двигатель отключается, а датчик 4 переключается из цепи управления двигателем в цепь управления питателем, подающим материал. Предмет изобретения 1. Автоматическое весовое загрузочное и дозирующее устройство с циферблатным указателем, содержащее подвижной циферблат с датчиками, взаимодействующими со стрелкой весов и включенными в цепь управления питателем, задатчик и датчик угла поворота подвижного циферблата, включенные в цепь управления приводом последнего, отличающееся тем, что, с целью точного определения действительного количества фактически загруженного материала, вторичный прибор, определяющий действительное количество фактически загруженного материала, подключен к датчику угла поворота подвижного циферблата через датчики, установленные на последнем и взаимодействующие со стрелкой весов в ее исходном положении и после окончания подачи материала. 2. Устройство по п. 1, отличающееся тем, что, с целью повыщения производительности и упрощения схемы и конструкции, датчики, включенные в цепь вторичного прибора, определяющего действительное количество фактически загруженного материала, установлены на подвижном циферблате со смещением по отношению к датчику, включенному в цепь управления питателя, на угол превосходящий угол, соответствующий предельному значению разности действительного количества загруженного материала и номинального значения порции.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ЗАГРУЗКИ ТАРЫ по ВЕСУ | 1965 |
|
SU167322A1 |
| ВЕСОИЗМЕРИТЕЛЬНЫЙ ИЛИ ДОЗИРУЮЩИЙ ПРИБОР С ЦИФЕРБЛАТНЫМ ОТСЧЕТНБ1М УСТРОЙСТВОМ | 1965 |
|
SU167324A1 |
| ВЕСОВОЙ ДОЗАТОР С ОТСЧЕТНЫМ УСТРОЙСТВОМ В ВИДЕ ЦИФЕРБЛАТА И КОНТАКТНЫХ ИЛИ БЕСКОНТАКТНЫХДАТЧИКОВ | 1964 |
|
SU164977A1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО ДЛЯ ДОЗИРС КРУПНОКУСКОВЫХ МАТЕРИАЛОВ | 1969 |
|
SU257062A1 |
| ВЕСОВОЙ ДОЗАТОР ДЛЯ СЫПУЧИХ МАТЕРИАЛОВ | 1972 |
|
SU355503A1 |
| Автоматический объемно-весовой дозатор,преимущественно для керамзитового гравия | 1973 |
|
SU485315A1 |
| ВЕСОВОЙ ДОЗАТОР ДЛЯ ВЯЗКИХ ПРОДУКТОВ | 1965 |
|
SU176091A1 |
| КАМЕРНЫЙ НАСОС ДЛЯ ТРАНСПОРТИРОВАНИЯ СБШУЧИХ МАТЕРИАЛОВ | 1971 |
|
SU291855A1 |
| Дозатор | 1983 |
|
SU1117456A1 |
| РЕГИСТРИРУЮЩЕЕ УСТРОЙСТВО | 1972 |
|
SU347588A1 |