ления режима питателя 10 на пониженной производительности. По сигналу от таймера 9 через блок 8 управления формируется сигнал предварительного запоминания,, обеспечивая отсчет избыточного потока до момента времени, определяемого по успокоению приемного бункера 2. Значение этого момента времени выдается на блок 5 сравнения
1
Изобретение относится к измерительной технике и может быть использовано в конверторных- цехах металлургической промышленности при дозировании шлакообразующих материалов, ферросплавов и легирующих добавок.
Целью изобретения является повышение точности измерения массы доз при нестационарных условиях формирования.
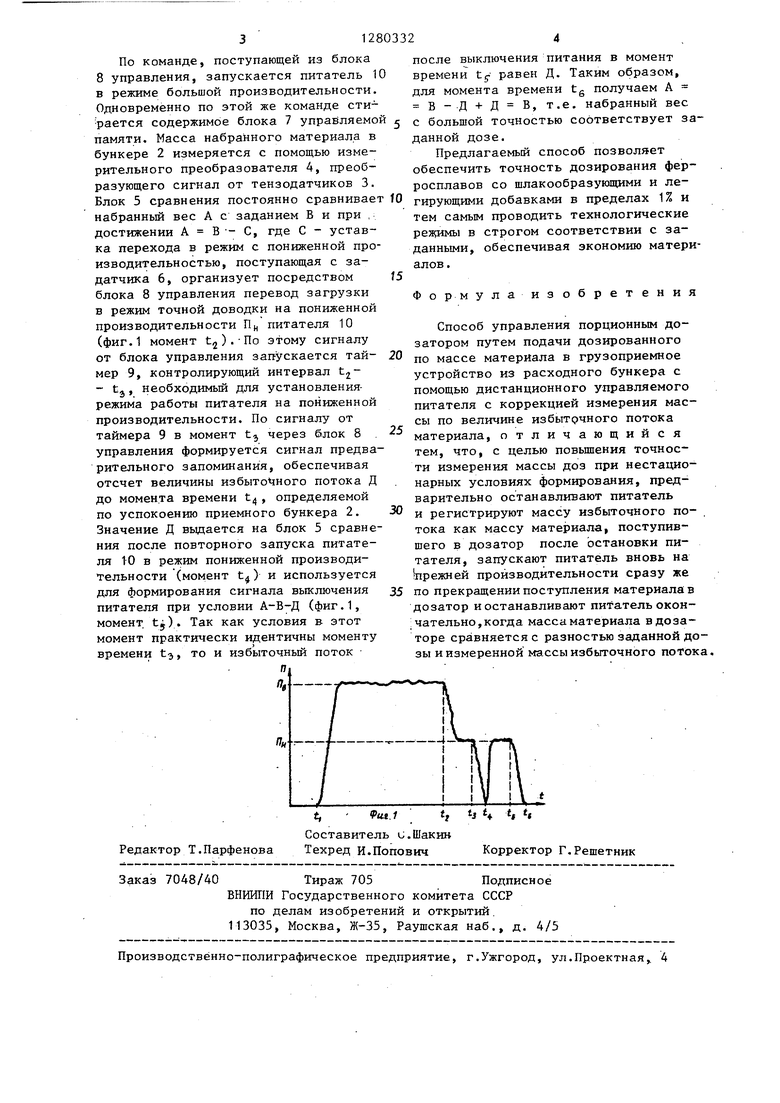
На фиг.1 изображена зависимость скорости поступления материала в дозатор от времени в процессе измерения массы одной дозы; на фиг.2 - структурная схема устройства, реали- зующего предлагаемый способ.
Устройство, реализующее предлагаемый способ, содержит задатчик 1 порции материала, приемный бункер 2, г тензодатчики 3, измерительньй пре- образо ватель 4, блок 5 сравнения, задатчик 6 уставки перехода в режим пониженной производительности, блок 7 управляемой памяти, блок 8 управления, таймер 9 и дистанционно управля мый питатель 10.
Выходы тензодатчиков 3 подключены через измерительный преобразователь 4 к первому входу блока 5 сравнения, второй вход которого соединен с за-, датчиком 1 порции материала. К треть му входу блока 5 сравнения подключен выход эадатчика 6 уставки перехода в режим пониженной производительности, а выход блока 5 сравнения соединен с первым входом блока управления, первый выход которого подключен к дистанционно управляемому питателю 10. Второй выход и второй вход блока 8 управления соединены друг с другом через таймер 9, а третий выход блока
после повторного запуска питателя 10 в режим прониженной производительности, а команду окончательного его останова формируют, когда масса материала в дозаторе отличается от заданной дозы на величину измеренного избыточного потока. Масса материала, окончательно набранная, равна заданной дозе материала. 2 ил.
0
5
0
5
8 управления подключен к управляющему входу блока 7 управляемой памяти.- Второй выход измерительного преобразователя 4 соединен с информационным входом блока 7 управляемо памяти, выход которого подключен к четвертому входу блока 5 сравнения.
Суть способа заключается в следующем.
При каждом измерении массы дозы осуществляют ступенчатый набор массы материала с уменьшением производительности питателя (фиг.1, участки t,- t,; и tj- t.,). После набора основной части дозы производят кратковременный предварительный останов питателя (фиг.1, момент t) к регистрируют массу материала, поступившую в дозатор-после команды на останов питателя (фиг.1, участок tg- t). Тем самым определяют массу избыточного потока материала. Как только прекращается поступление материала в дозатор (фиг.1, момент t), питатель запускают вновь на прежнюю производительность, а команду окончательного его останова формируют, когда масса материала в дозаторе достигнет величины, отличающейся от заданной дозы на величину измеренного избыточного потока (фиг.1, момент tj). Так как услог ВИЯ предварительного и окончательного останова практически одинаковы, то и масса избыточного потока после окончательного останова питателя равна массе предварительно измеренного избыточного потока, а масса материала, окончательно набранная в дозаторе, с большой степенью точности равна заданной дозе материала.
после выключения питания в момент времени t;- равен Д. Таким образом, для момента времени tg получаем А В-Д+Д В, т.е. набранный вес
312803324
По команде, поступающей из блока 8 управления, запускается питатель 10 в режиме большой производительности. Одновременно по этой же команде стирается содержимое блока 7 управляемой большой точностью соответствует за- памяти. Масса набранного материала в данной дозе.
бункере 2 измеряется с помощью изме- Предлагаемый способ позволяет рительного преобразователя 4, преоб- обеспечить точность дозирования фер- разующего сигнал от тензодатчиков 3. росплавов со шлакообразующими и ле- Блок 5 сравнения постоянно сравнивает fO тирующими добавками в пределах 1% и набранный вес А с заданием В и при , ем самым проводить технологические достижении А В - С, где С - уставка перехода в режим с пониженной производительностью, поступающая с за- датчика 6, организует посредством J5 блока 8 управления перевод загрузки в режим точной доводки на пониженной
Способ управления порционным дозатором путем подачи дозированного по массе материала в грузоприемное устройство из расходного бункера с помощью дистанционного управляемого питателя с коррекцией измерения массы по величине избытрчного потока материала, отличающийся
реярнмы в строгом соответствии с заданными, обеспечивая экономию материалов t
Формулаизобретения
производительности Пц питателя 10 (фиг.1 момент tj).По этому сигналу от блока управления запускается таймер 9, контролирующий интервал
- t
3.
необходимый для установлениярежима работы питателя на пониженной производительности. По сигналу от таймера 9 в момент ta через блок 8 . 25
управления формируется сигнал предварительного запоминания, обеспечивая отсчет величины избыточного потока Д до момента времени t, определяемой по успокоению приемного бункера 2. Значение Д вьщается на блок 5 сравнения после повторного запуска питателя 10 в режим пониженной производительности (момент t,j) и используется для формирования сигнала выключения питателя при условии А-В-Д (фиг.1, момент, tj). Так как условия в этот момент практически идентичны моменту времени t, то и избыточный поток
П
30
35
тем, что, с целью повьшения точности измерения массы доз при нестационарных условиях формирования, предварительно останавливают питатель и регистрируют массу избыточного потока как массу материала, поступив- щего в дозатор после остановки питателя, запускают питатель вновь на прежней производительности сразу же по прекращении поступления материала в дозатор и останавливают питатель окон- ;чательно,когда масса материала в дозаторе сравняется с разностью заданной дозы и измеренной массы избыточного потока.
Пн
после выключения питания в момент времени t;- равен Д. Таким образом, для момента времени tg получаем А В-Д+Д В, т.е. набранный вес
большой точностью соответствует за данной дозе.
Предлагаемый способ позволяет обеспечить точность дозирования фер- росплавов со шлакообразующими и ле- тирующими добавками в пределах 1% и ем самым проводить технологические
реярнмы в строгом соответствии с заданными, обеспечивая экономию материалов t
Формулаизобретения
20
0
5
тем, что, с целью повьшения точности измерения массы доз при нестационарных условиях формирования, предварительно останавливают питатель и регистрируют массу избыточного потока как массу материала, поступив- щего в дозатор после остановки питателя, запускают питатель вновь на прежней производительности сразу же по прекращении поступления материала в дозатор и останавливают питатель окон- ;чательно,когда масса материала в дозаторе сравняется с разностью заданной дозы и измеренной массы избыточного потока.
Редактор Т.Парфенова
t, - .1tj
Составитель с.Шакин Техред И.Попович
Заказ 7048/40 Тираж 705Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий. 113035, Москва, Ж-35, Раушская наб., д. 4/5
.
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,. 4
t. t t. t.
J Ч
« «
Корректор Г.Решетник
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ весового дозирования и устройство для его осуществления | 1987 |
|
SU1629759A1 |
| Способ весового дозирования сыпучих материалов | 1989 |
|
SU1615566A2 |
| АВТОМАТИЧЕСКАЯ ПОТОЧНАЯ ЛИНИЯ ДЛЯ ПРИГОТОВЛЕНИЯ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2028979C1 |
| Способ весового дозирования сыпучих материалов | 1985 |
|
SU1307241A1 |
| Устройство управления весовым дискретным дозированием сыпучих материалов | 1984 |
|
SU1216662A1 |
| Весовой порционный дозатор | 1980 |
|
SU879316A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2005 |
|
RU2294237C2 |
| Способ весового автоматического дозирования сыпучих материалов и устройство для его осуществления | 1988 |
|
SU1527511A1 |
| Способ весового дискретного дозирования сыпучих материалов | 1989 |
|
SU1642256A1 |
| ВЕСОВОЙ ДОЗАТОР ПОРОШКА | 2007 |
|
RU2343427C1 |
Изобретение может быть использовано при дозировании шлакообразующих материалов. По команде блока 8 управления запускается питатель 10 и стирается содержимое блока 7 управляемой памяти. Масса материала в бункере 2 измеряется преобразователем 4, преобразующим сигнал от тензодатчи- ков 3. Блок 5 сравнивает набранный вес с заданным. По сигналу от блока 8 управления запускается таймер 9, онтролирующий интервал для установ(Л
| Способ весового порционного дозирования сыпучих материалов | 1974 |
|
SU512385A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления весовым порционным дозатором | 1977 |
|
SU624120A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
