(54) ЭЛЕКТРОМАГНИТНЫЙ ВИБРАЦИОННЫЙ ПРИВОД


| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1974 |
|
SU561257A1 |
| Двухобмоточный электромагнит со встроенными выпрямителями | 1981 |
|
SU1001215A1 |
| Вентильный электродвигатель | 1972 |
|
SU445104A1 |
| Вентильный электродвигатель | 1977 |
|
SU765946A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416861C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437200C1 |
| Вентильный электродвигатель | 1973 |
|
SU518843A2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437203C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2094931C1 |

1
Изобретение относится к электромагнитным вибрационным приводам, применяемым преимущественно для возбуждения направленных колебаний, например, в вибрационных питателях, транспортерах, дозаторах.
Известен электромагнитный вибрационный привод, содержащий магнитопроводы с обмотками, якори, упругую систему и элементы управления режимом работы 1. В указанном приводе в качестве элементов управления режимом работы привода использован прикрепленный к рабочему органу датчик в виде вибрационного генератора, настроенного резонансно с частотой питающей электросети.
Недостаток этого привода состоит в малой надежности, сложности конструкции, нестабильности работы И трудоемкости резонансной настройки вибрационного генератора.
Известен и другой электромагнитный вибрационный привод, содержащий статор, вьшолненный в виде И-образного магнитопровода с обмоткой возбуждения и управления, якори, упругую систему И элементы управления режимом работы 2. Данный привод является наиболее близким к описываемому изобретению.
Недостатком такого вибропровода является то, что при колебатшях напряжения и частотьг питающей сети, а также технологической нагрузки изменяется режим работы привода.
Цель изобретения - повыщение стабильности режима работы привода при изменении условий функционирования.
Указанная цель достигается тем, что в центральной части магнитопровода статора выполнены отверстия, в которых размещены две состоящие из встречно включенных секций обмотки, секции одной ИЗ НИХ расположены соосно относительно поперечной ОСИ статора, а секции другой - симметрично относительно той же оси, причем одна обмотка соединена с обмоткой возбуждения, а другая - с элементами управления. Секшш обмоток могут быть выполнены перекрещивающимися между собой.
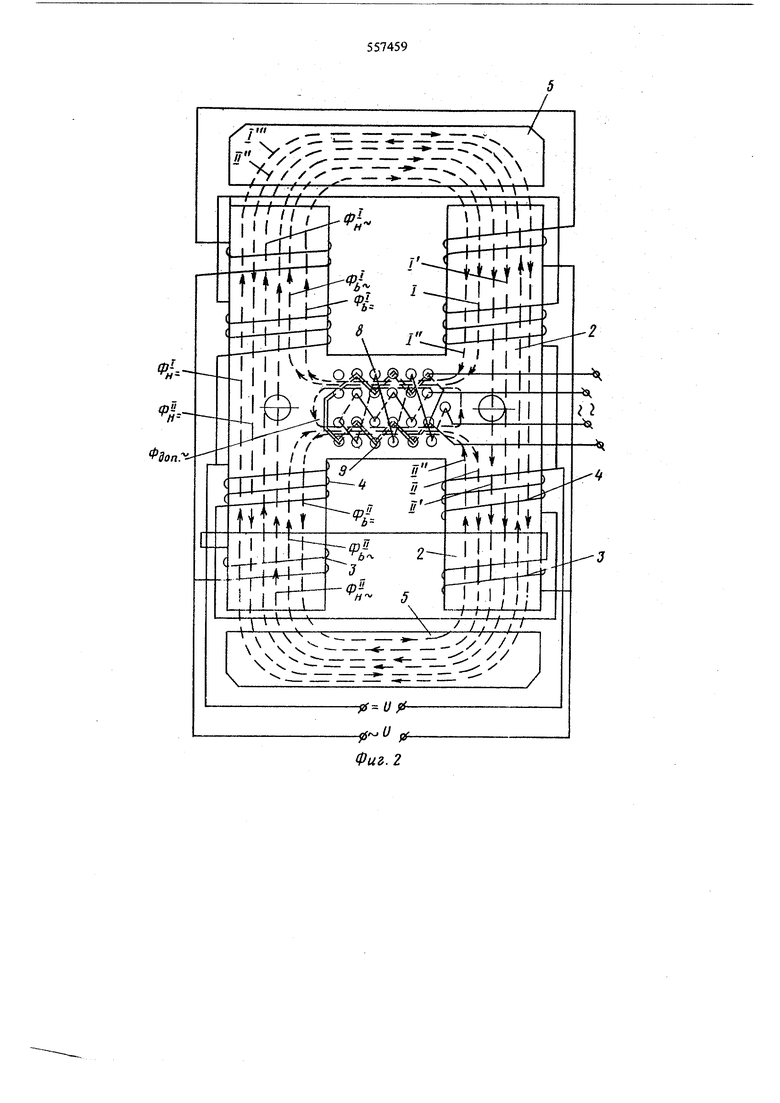
На фиг. 1 показан электромагнитный вибрационньш привод, общий вид; на фиг. 2 - статор н якори .привода; на фиг. 3 - кривые зависимости напряжения обмотки, соединенной с элементами управления, от режима работы привода, регулируемого постоянным током в обмотке управления.
Электромагнитный вибрационный привод содержит корпус , с которым сочленен статор с
Н-образным магнитопроводом 2, обмоткой возбуждения 3 и управления 4, два якоря 5, упругую систем в ввде пакета рессор 6, концы которого защемлены между опорными подушками 7, и элементы управления режимом работы (не показаны). Обмотка возбуждения 3 состоит из четырех секций, которые в каждой половине статора соединены последовательно так, чтобы образовать магнитный поток одного направления, а отдельные ветви этой обмотки (ветвь - две секции обмотки в половине статора) соединены параллельно. Обмотка управления 4 также состоит из четырех секций, которые в каждой половине статора соединены между собой в ветви последовательно и встречно, а ветви - параллельно. В центральной части магнитопровода 2 статора вьшолнены отверстия, в которых размещены дополнительные обмотки 8 и 9. Обмотка 8 состоит из всфечно включенных секций, расположенных соосно относительно поперечной оси магнитопровода статора, а обмотка 9 - из встре шо включенных секций, расположенных симметрично относительной той же оси. Обмотки 8 и 9 вьшолнены перекрещивающимися. Обмотка 8 является измерительной, и нагфяжение с ней подано на элементы управления режимом работы привода, обмотка 9 - намагничивающей и соединена с обмоткой возбуждения 3. Функции обмоток 8 и 9 могут быть изменены на обратные.
При включении привода на источники питания в его магшттной системе возникают переменные и постоянные магнитные потоки, создаваемые токами в соответствующих обмотках: обмотке возбуждения 3, обмотке управления 4 и намагничивающей обмотке 9.
Переменные магнитные потоки обмотки возбужцения 3, участвующие в создании тяговой силы привода и каждой из его половин, замыкаются как по внутренним I и II, так и по внешним контурам I и 1Г их магнитных систем (см. фиг. 2). Таким образом, эти потоки можно представить в виде сумм трех магнитных потоков:
для одной половины привода и
ф..
для другой его половины.
При этом Ф Ф в любой момент времени,
где
Фв в- части переменных магнитных потоков ветвей обмотки возбуждения 3, замыкающиеся по внутренним контурам соответствующих половин привода;
Фц и Фн - части переменных магнитных потоков ветвей обмотки возбуждения, замыкающиеся по внещним контурам соответствующих половин привода.
Яостоянные магнитные потоки обмотки управле1™я 4 в каждой половине привода, участвующих в создании его тяговой силы, замыкаются только по внутрешим.. контурам магнитных систем, 1гри этом Фв- Ф в- .011ределе5шые доли постоянных магнитных потоков Фн. и в каяодой из половин привода замьжаются также и по внешним контурам Г и 1Г их магнитных систем, однако они не участвуют в создании тяговой силы, поскольку направляй встречно друг другу.
Переменный магнитный поток наг-тагничивающей обмотки 9 - Фдoп замыкается по внутреннему контуру центральной части магнитопровода статора.
В результате взаимодействия переменных магнитных потоков Ф и с постоянными магнитными потоками Фв и фв- в магнитной системе привода возникают пульсирующие магнитные потоки, сдвинутые в двух его половинах на 180°, на зтот же утоп сдвинуты в каждой половине и соответствующие им тяговые усилия. Равнодействующая сил притяжения обеих половин привода подчинена гармоническому закону и вызывает колебательные движения статора и якорей с частотой, равной частоте тока возбуждения. Момент чистого изгиба в поперечном сечении центральной части магнитопровода статора изменяется так же, как и тяговое усилие, по гармоническому закону
Изменения режима работы привода сопровождаются перераспределением магнитных потоков и механических напряжений в его магнитной системе, в частности в центральном участке магнитопровода статора. Магнитно-напряженное состояние этого участка статора определяет величину суммарной Э.Д.С., индуктируемой в измерительной обмотке 8. Составляющие этой э.д.с. определяются начальной анизотропией магнитных свойств материала магпитопровода, в результате при на;шчии переменного магнитного потока Фдоп.. нз выходе измерительной обмотки индуктируется начальная э.д.с. нечетных гармоник; переменными магнитными потоками Фв. и Фв, вызванными токами в ветвях обмотки возбуждения и замыкающимися по внутренним контурам магнитных систем половин привода, в результате при некоторой технологической неидентичности вьшолнения секций обмоток на выходе измерительной обмотки появляется начальная Э.Д.С. нечетных гармоник; переменными магнитными потоками Фв и Фв, вызванными токами собственной (обратной) э.д.с. привода, индуктирующейся в обмотке возбуждения при периодическом изменении магнитного сопротивления воздупшых зазоров, в результате на выходе измерительной обмотки появляется э.д.с., частота которой равна частоте вибраций; магнитомодуляционным эффектом, выражающимся в том, что магнитное состояние магнитопровода привода изменяется по несимметричным частным циклам при наличии переменных магнитных потоков Фв и Фя , Фдопл Фв- и Фв. и постоянных магнитных потоков Фв- и Ф;, в результате на выходе измерительной обмотки индуктируется Э.Д.С. четных гармоник; магнитоанизотропным эффектом, в результате при появлении в центральной части статора механических напряжений от периодически изменяющегося момента чистого изгиба и перераспределении магнитных потоков на выходе измерительной обмотки шщуктируется Э.Д.С. нечетных гармоник.
Таким образом, суммарная э.д.с. измерительной обмотки является комплексным параметром, характеризующим режим работы привода.
Поддерживая величину этой э.д.с. с помощью элементов управления на заданном уровне, стабилизируют магитно-напряженное состояние централь.ной части магнитопровода и в итоге - режим работы вибрационного привода при изменении условий его функдионирования.
На фиг. 3 представлены два из возможных варианта экспериментальных зависимостей суммарной э.д.с. измеритель11ой обмотки при испытании привода мощностью 1 квт. (количество витков намагничивающей обмотки - 45, измерительной - 700, переменное напряжение намагничивающей обмотки - 45 в). Кривая а снята в слз/чае, когда обмотка 8 использовалась в качестве намагничивающей, а обмотка 9 - в качестве измерительной. Кривая б снята в случае, когда функщш обмоток 8 и 9 изменены на обратные. Предпочтительным является второй вариант использования обмоток 8 и 9.
Техническими преимуществами предлагаемого привода являются высокая надежность и простота конструкции узла контроля режима его работы. Таким образом, электромагнитный вибращ онный
привод позволяет повысить стабильность режима его работы.
Формула изобретения
Источники информации, принятые во внимание при экспертизе:
Фи&.2
т
25
x
y
W
/
0,30,7 1,2 /.4 ,5
Л
V
..
23
,MM
Фuг.l
