1
Изобретение относится к области электротехники, в частности к электродвигателям с бесконтактной коммутацией.
Известны вентильные электродвигатели переменного тока, состоящие из динамического трансформатора, служащего для передачи электромагнитной энергии в цепь обмотки якоря и одновременно ВЫПОЛНЯКУщего функцию силового датчика положения ротора, и собственно двигателя и содержащие систему возбуждения и обмотку якоря, секции которой коммутируются с помощью управляемых вентилей l .
Обмотка якоря этого электродвигатепя, расположенная на роторе, вместе с коммутирующими вентилями и устройством управления ими представляет собой Bpamato- шийся. рвверсивный (Однополупериодный выпрямитель. Характерной .особенностью коаструкций подобного типа является то. Что Система управления ими является однока- нальной, так как управляющие импульсы подаются на все вентили одновременно.
Известны также вентильные электродви - ратели, у которых обмотка якоря помещена на статоре, а динамический трансформа тор выполнен в виде конструкции с явн« Полюсным ротором, причем его вторичная обмотка совмещена с обмоткой якоря 2J Его преимущество состоит прежде всего и том, что управляющие вентили могут быть размещены вне электрической машины, и поэтому отпадает необходимость в применении специального устройства для пере- дачи сигналов управления на ротор через ;воздушный зазор.
Это устройство по технической сущности и достигаемому результату являе-уся
наиболее близким к изобретению. Однако двигатели, у которых вторичная обмотка динамического; трансформатора конструктивно совмещена с обмоткой якоря, имеет и ряд существенных недостатков в связи
с тем, .что Могут работать только в режиме оцйополупериодного Выпрямления переменного Тока. Следствием этого явл$ ются низкие энергетические показатели (низкие значения к.п.ц. и коэффициента
мощности), а также загрузка питающей
сети постоянной составлякяцей тока и высшими гармониками.
Цель изобретения - повышение энерге тйческих показателей электродвигателя при сохранении одноканальной системы управле- кия, а также упрощение конструкции силового датчика положения ротора (динамичеокого трансформатора).
Указанная цель аостигается тем, что магнитопроводы статора динамического
трансформатора выполнены в виде стержневых П-образных пакетов, число которых равно произведению числа полюсов двига теля на число секций обмотки якоря. На каждом магнитопроводе помещена одна катушка первичной обмотки и катушки вто ри4ной обмотки в количестве, равном числу секций обмотки якоря. При этом все ка тушки первичной обмотки соединены согласно, а катушки вторичной обмотки обьедийены в группы, число которых равно числу псшюсов синхронной машины. Катушки внутри группы соединены пос1:эдовательно-согласно, а группы катушек между собойпоследовательнс-встречно.
Таким образом, в предлагаемой конструкции вторичные обмотки динамического трансформатора и секции обмотки якоря вы полнены раздельно и не являются функционально и конструктивно совмещенными, что дает возможность использовать режим двухпопупериодного выпрямления тока в обмотке якоря и тем самым повысить энергетические показатели электродвигателя. При этом динамический трансформатор обес печивает циклическое опрокидывание фазы напряжения его вторичных обмоток в процессе вращения, хотя первичная и вторичная обмотки взаимно неподвижны, что поз волябт сохранить одноканальную систему управления. Одновременно достигается существенное упрощение динамического транй форматора, поскольку в его конструкции использованы только сосредоточенньте обмотки, размещенные на однкх и тех же П-образнь х магнитопроводах статора. Порядок соединения вторичных обмоток между собой таков, что в результате они образу- SOT системь, аналогичные распределенным обмоткам с шагом, равным полюсному де-. лению синхронной машины.
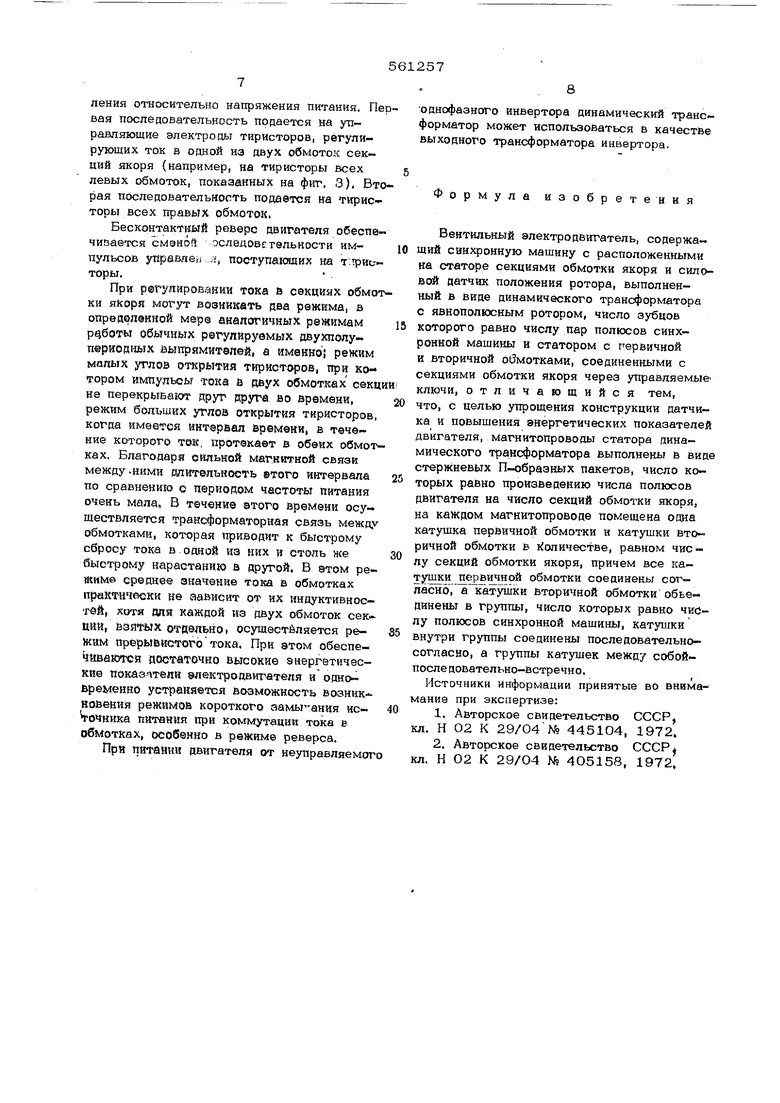
На фиг. 1 показан электродвигатель, разрез по А-А на фг-гг. 2; на фиг. 2 - разрез по Б-Б на фиг. 1; на фиг. 3 представ лена принципиальная электрическая схема .электродвигателя; на фиг. 4 - гсхема намоткя секции якоря и вторичной обмотки Дйнпмического трансформатора; на фиг.5 гpaфJffiй 9лектромагн1гтных процессов, характеризующих работу электродвигателя.
Активная часть ротора электродвигателя состоит из магнитопровода системы возбуждения 1 с обмотками возбуждения 2 и немагнитной втулки 3, в пазах которой оазмещены магнитопроводы 4 ротора динамического трансформатора. Число этих магнитрпроводов равно числу пар полюсов системы возбуждения. Оси магнитопрово- дов 4 располагаются со сдвигом относиельно друг др5аа на два полюсных деле- (ШЯ и со сдвигом относительно полюсов системы возбуждения на половину полюсного деления. Ширина каждого такого маг- нитопровода не должна превышать одного полюсногэ деления. На втулке 3 помещена также вторичная обмотка 5, охватывающая магнитопроводы 4 и служащая для питания обмоток возбуждения двигателя через выпрямитель, элементы которого (диоды б на фиг. 2) расположены на роторе.
В корпусе 7 закреплены магнитопровод статора двигателя 8 с размещенной в его пазах обмоткой якоря 9 и магнитопровод статора динамического трансформатора. По слёднйЙсостсмт з ф рр|6магнитных стёрж- невых П образных пакетов, замыкающих магнитный поток динамического трансформатора в аксиальном направлении. Общее количество этих пакетов ,равно произведению числа секций обмотки якоря на число полюсе системы возбуждения (в предлагаемой конструкции их число равно двенадцати). Пакеты состоят из радиально расположенных магнитопрово дов 10, 11, соединенных магнитопроводами 12. На маг нитопроводах 12 размещены первичные обмотки динамического трансформатора и вторичные обмотки, число которых равно числу секций обмотки якоря. Все первичные обмотки, расположенные на магнитопроводах 12, соединены согласно и создают переменный магнитный поток, замыкающийся в аксиальном направлении. Каждая вторичная обмотка состоит из последоватално соединенных двенадцати секций, расположенных на магнитопроводах 12 (по три обмотки согласно), что эквивалентно вторичной обмотке, вьшолненной с шагом, равным полюсному делению и пространственно ориентированной относительно соответствующей обмотки якоря.
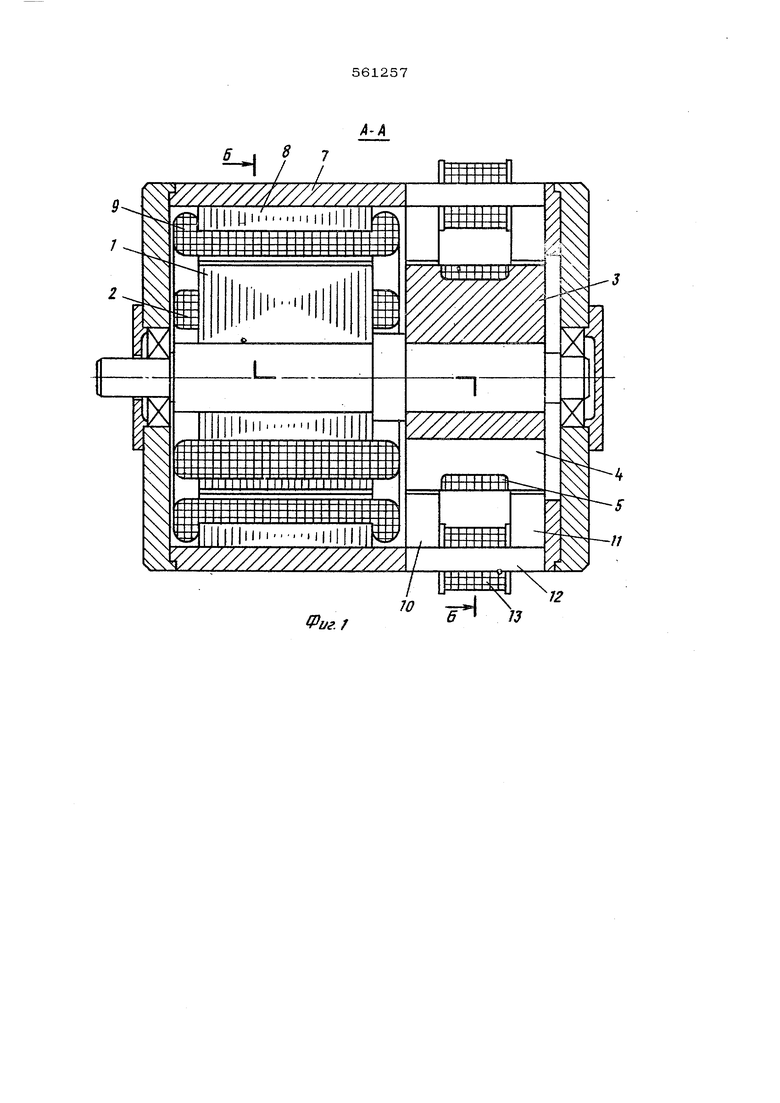
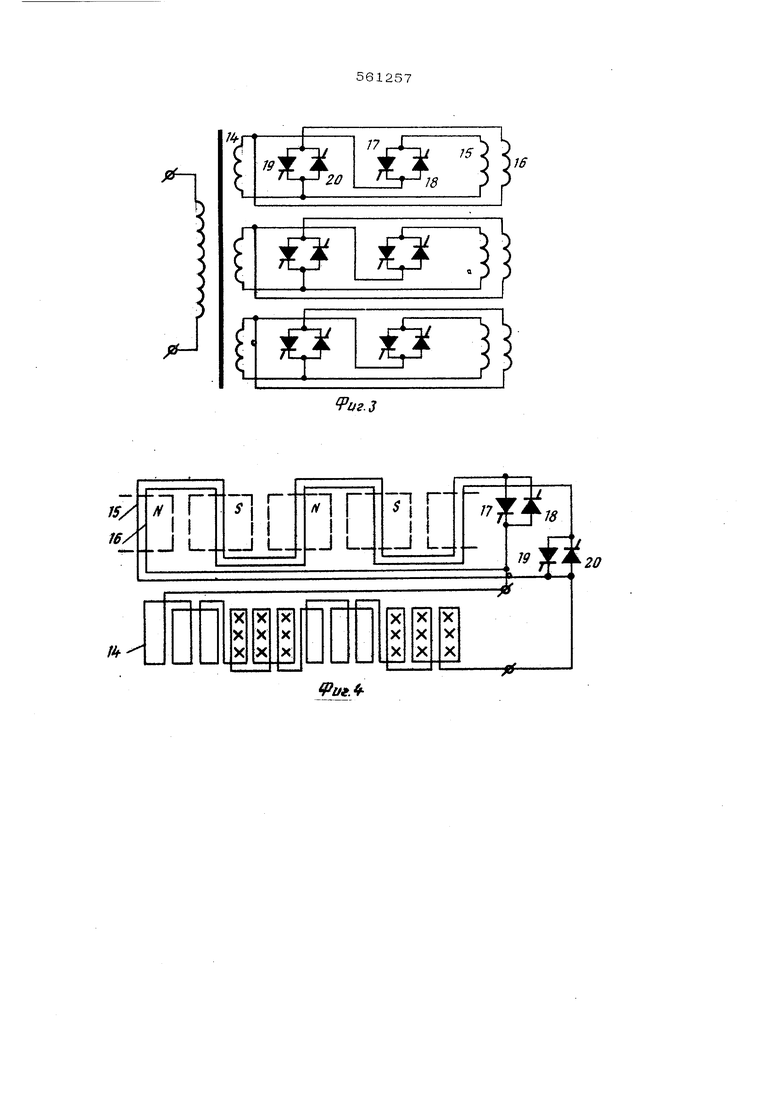
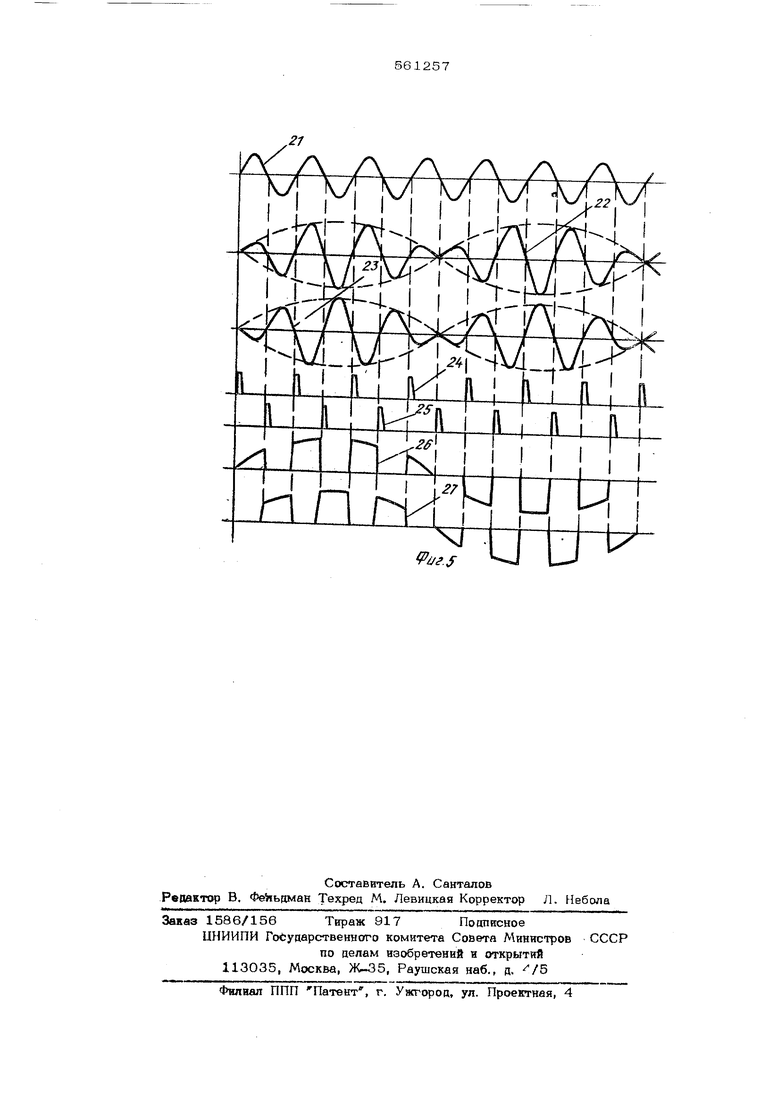
Принципиальная электрическая схема двигателя представлена/ на фиг. 3. Первичная обмотка 13 динамического транс форматора подключается к сети однофазного переменного тока. Вторичные обмотки (на фиг. 3 их-число равно трем) соединяются с соответствующими секциями обмотки якоря. Каждая секция намотана дпоЙЕ Ым проводом С швгом, равным полюс люсному Г1елению. Таким образом, каждая секция якоря состоит из двух отдельных обмоток, расположенных в одних и тех же пазах, благодаря чему между ними возник ет сильная магнитная связь (коэффициент связи близок к единице). Последовательно с каждом обмоткой вклвзчена пара соединенных встречно-парал лельно тиристоров. Одна из двух обмоток, принадлежащая данной секции, подключена к началу вторичной обмотки динамического трансформатора своим концом, вторая началом. Ка фиг. 4 представлена схема намотки одной из трех Вторичных обмоток 14 динамического трансформатора (фиг. 3, 4) и соответствующих ей обмоток секции яко ря 15, 16 (фиг. 3, 4), последовательно с которыми всключены встречно параллель ные тиристоры 17, 18 и 19, 20 (фиг. 3, 4). Активные проводники секции обмотки якоря находятся в зоне действия полюсов системы возбуждения. Контур вторичной обмотки 14 сцепляется с переменными.потоками динамического трансформатора. На фиг. 4 условно показаны направления силовых -линий в зонах действия переменных потоков. Они смещены относительно зон действия потоков возбуждения на половину полюсного деления, поскольку магнитопроводы 4 ротора динамического трансфторматора смещены относительно полюсов возбуждения. На фиг. 5 представлены графики электромагнитных процессов двигателя, как фу ции времени, а именно 21 - переменное напряжение питания первичной обмотки динамического трансформатора, 22 - переменное напряжение цепи обмотки 15, 23переменное напряжение в цепи обмотки 18 Напряжения 22, 23 показаны изменяк шимися в противофазе, так как они отсчитываются относительно одноименных зажимов этих обмоток, 24- импульсы упрааления тиристорами 17, 18, 25 - имрульсы управления тиристорами 19, 2О, 26 - ток в обмотке 15, 27 - ток в обмотке 16. Электродвигатель работает следующим образом. Силовые линии аксиальных магнитных потоков динамическооо трансформатора, сцепляясь г. контурами его вторичных обмоток, в любой момент времени имеют от носительно этих контуров одинаковое направление. Так как число магнитопр оводов 4 вдвое меньше числа полюсов системы возбуждения, а сдвиг между их осями составляет два полюсных деления, индуктируе мые во вторичных обмотках переменные э.ц.с. суммируются (например, в обмотке 14, фиг. 4). При смещении в процессе вращения магнитопроводов 4, а следовательно, и зон /действия переменных потоков на угол, равный половине полюсного деления (в данном случае на 45 градусов) относительно положения, показанного на фиг. 4, суммарная индуктируемая обмотки переменная э.д.с. станет равной нулю, а при смещении на угол, больший 45 градусов, произойдет опрокидывание фазы э.д.с. на 18 эл. град. В каждой вторичной обмотке динамического трансформатора присоединена секция якоря, состоящая из двух обмоток. Коммутацию токов в секциях якоря удобно рассмотреть на примере одной секции, состоявши из обмоток 15, 16, присоединенных ко вторичной обмотке динамического трансформатора 14 (фиг. 3,4). При указанном выще .порядке подключекия одноименных зажимов этих обмоток наведен- ная трансформаторная э.д.с. оказывается приложенной к ним в противофазеJ(кривые 22, 23 на фиг. 5). На тиристоры 17, 18, регулирующие величину тока в обмотке 15, подается последовательность импульсов уп равления 24 на тиристоры 19, 20, регулирующие ток в обмотке 16 - последовательность импульсов 25. Для каждой из двух обмоток, составляющих данную секцию якоря, совпадение во времени положительной полуволньг э. д.с. и импульса на управляющем электроде обеспечивается лишь для одного из двух тирисг торов, поэтому в каждой обмотке протекает выпрямленный пульсирующий ток. Так как импульсы управления двумя обмотками секции сдвинуты во времени на половину периода напряжения питания, то соответственно сдвинуты во времени и импульсы тока в этих обмотках (кривые 26, 27 на фиг. 5). Поэтому суммарная намагничивающая сила каждой секции получается такой же, как если бы она создавалась одной обмоткой, питаемой током, полученным в результате двухполуперйодного выпряйления. Изменение направления тока в обеих обмотках секции происходит в момент опрокидывания фазы Э.Д.С., когда активные проводники секции находятся на линии нейтрали, т.е. между соседними полюсами ев стемы возбуждения. Регулирование величины тока в секциях обмотки якоря (а, следовательно, и скорооти вращения двигателя) осушествлпется счет синхронного сдвига во времени обеих последовательностей импульсов упоавления относительно напряжения питания. Пер вая последовательность подается на управляющие электроды тиристоров, регулирующих ток в одной из двух обмоток секций якоря (например, на тиристоры всех левых обмоток, показанных на фиг, 3), Вто рая последовательность подается на тиристоры всех правых обмоток,
Бесконтактный реверс двигателя обеспечивается смэной оследовстельности импульсов укравлег я, поступающих на т.трис. торы.
При рэгуяировакии тока в секциях обмотки яКоря могут вйвникать два режима, в определенной мере аналогичных режимам Р4боты обычных регулируемых двухполупёриодных выпрямителей, а именно; режим мадых углов открытия тиристоров, при котором импульсь тока а двух обмотках секц не перекрывают друг друга во времени,
режим больших углов открытия тиристоров, когда имеатся интервал времени, в течение которого тек, протекает в обеих обмотках. Благодаря сильной магнитной связи между .ними ютктельность этого интервала по сравнению с периодом частоты питания очень мала. В течение этого времени осуществляется трансформаторная связь между обмотками, которая приводит к быстрому сбросу тока в.одной из них и столь же
быстрому нарастанию в другой. В этом решнмв средне© значение тока в обмотках практически не зависит от их индуктивностбй, хотя для каждой из двух обмоток сек ЕИй, отцбдьно, осушестбляется реЖам Прерывистоготока. При этом обеспечиваютсй йостаточно высокие энергетичес кие показптейй электродвигателя и одно временно устраняется возможность возник новения режимов короткого аамьг-ання ксVo4KHKa питания при коммутации тока е обмотках, особенно в реЖйме реверса.
При Питании двигателя от неуправляемог
однофазного инвертора динамический трансформатор может использоваться в качестве выходного трансформатора инвертора.
Формула изобретения
Вентильный электродвигатель, содержа щий синхронную мащину с расположенными на статоре секциями обмотки якоря и силовой датчик положения ротора, выполненный в виде динамического трансформатора с явнополюсным ротором, число зубцов которого равно числу пар полюсов синхронной машины и статором с первичной и вторичной оймотками, соединенными с секциями обмотки якоря через управляемые ключи, отличающийся тем, что, с целью упрощения конструкции датчика и повышения энергетических показателей двигателя, магнитопроводы статора динамического трансформатора выполнены в вид стержневых П-образных пакетов, число которых равно произведению числа полюсов двигателя на число секций обмотки якоря, на каждом магнитопроводе помещена одна катутлка первичной обмотки и катушки вторичной обмотки в Количестве, равном числу секций обмотки якоря, причем все катушки первичной обмотки соединены согласно, а катущки вторичной обмотки объединены в группы, число которых равно числу полюсов синхронной машины, катушки внутри группы соединены последовательносогласно, а группы катушек между собойпоследовательно-встречно.
Источники информации принятые во внимамание при экспертизе:
1.Авторское свидетельство СССР, кл. Н 02 К 29/04 № 445104, 1972.
2.Авторское свидетельство СССР кл. Н 02 К 29/04 № 4О5158, 1972,
Ч/ /
т/////// ////////у /S V I I II I . . .1 I II I 1.т
I ||Ц|II
N
X


| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1973 |
|
SU518843A2 |
| Вентильный электродвигатель | 1972 |
|
SU445104A1 |
| Вентильный электродвигатель | 1977 |
|
SU765946A1 |
| Однофазный вентильный электродвигатель | 1976 |
|
SU657536A1 |
| Вентильный электродвигатель | 1982 |
|
SU1095322A1 |
| Линейный электродвигатель | 1977 |
|
SU693514A1 |
| Репульсионный вентильный электродвигатель | 1977 |
|
SU666619A1 |
| Вентильный электродвигатель | 1978 |
|
SU758416A1 |
| ВСЕСЧ>&ЮЗИАЯ пдтЕШ11а-Т1:хпУ1ЕСй | 1973 |
|
SU388335A1 |
| Линейный электродвигатель | 1976 |
|
SU655038A1 |

X
ш
W///// Z / ///A
л-г /
X
у//////////.
Ч
-i
I -//
L
Л,
V
W
12 73
8
.2
fput.
л л л
, Vi М
