1
Изобретение относится к области силоизмерительной техники и может быть использовано для измерения уси;шй, преимущественно до 1ООО кг.
Известные магнитоупругие датчики усиЛИЙ, выполненные на базе мапштопровода с отверстиями для размещения измерительных обмоток, включенных в измерительную схему, не обеспечлгвают требуемую чувствительность и П.ПФОКИЙ диапазонИЗМ9рений.
Известен также магнитоутгругий датчик усилий, .содержащий изгибаемый замкнутый магнитопровод. в виде пакета связанных по кинтуру нймагнитными стойками пластин с отверст;i5C-.in для размещения измерительных обмоток, включенных в измерительную схекг;/.
Однако его нэ,.остаток также в том, что он не обеспо-.нзает требуемую чувстви телыюсть и Ш11ро1-.ай диапазон измерений, так как указанны ; датчик предназначен только для определенного диапазона измеряемых усилий,в ч, стаости,порядка 0-ЗООг и в его кэнст1.укции нг; предусмотрена возможность быстрой перестройки на другой диапазон измеряемых усилий.
Цель изобретения - повыш«;ние чувствительности и расщнрение диапазона измеряэмых усилий.
Достигается это TGN, что в магнитоупругом датчике усилш, содержаихем корпус с крыиской, в которой вмонтирован силопередающий элемент, и магнитопровод в виде связанных по контуру немагнитными элементалП пластин с отверстиями для размещения измерителышхх обмоток, вклю4ejfflbix в измерительную схему, в немаггшт1 ьп 1 внедешл ступенчатые опорные площадки с от зерстиями для пластин, которые закрэиляш г стяж:шз1ми элементами Б виде болтов, и KoiauoBbit; упоры, устанавливаемые на сту;1Э1 чатых опорах корпуса.
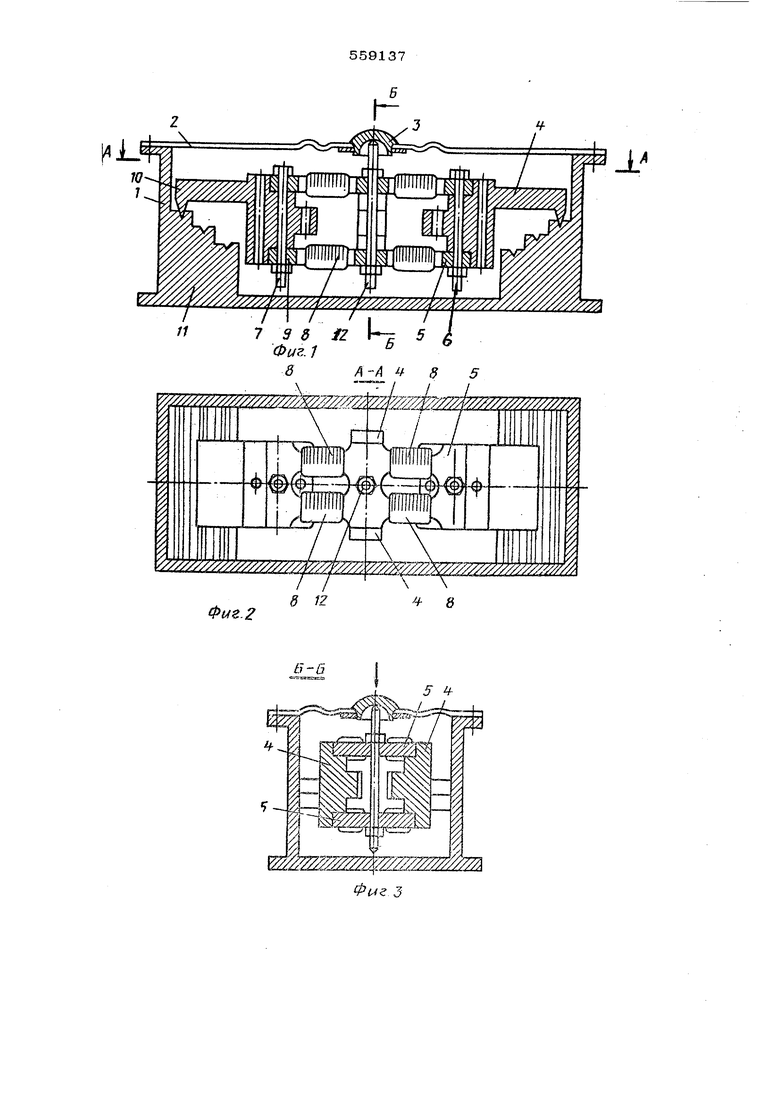
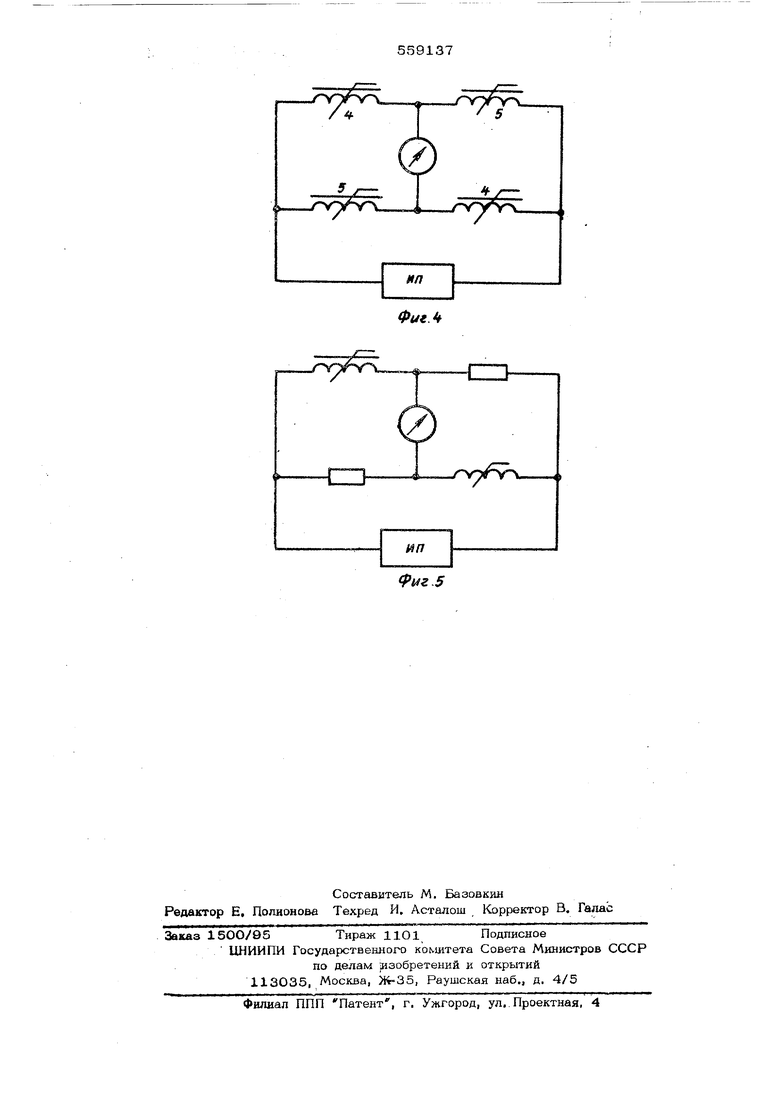
На фпг. 1 изображрк маг 1птоупругий датчик усилий; ла фиг. 2 - разрез по А-Л на флт. 1; ia фиг. 3 - разрез по Еэ-Б на фи). 1; на фиг. 4 - схема включен)-.я измер1;тель. обмотэк при различных знаках приращ шя магнитной иронидаемости} на фиг. 5 - то же, при одинаковых знаках приращения. Датчик содержит расположенный в корпусе i с крышкой 2, в которой вмонтироBiaH силопередающий элемент 3, магнвтопровод в виде связанных по контуру немагнитными элементами 4 пластин 5с от верстиями для стяжных элементов, напримерр болтов 6 и 7 и для размещения измерительных обмоток 8. В немагнитные элементы 4 введены зеркально располсгженные ступенчатые опорные площадки 9 ппя пластин 5 и концевые упоры 10, уоТановленные на ступенчатых опорах 11 (см. фиг. l) корпуса 1. Пластины 5 закреплены на опорных площадках 9 немагнитных элементов 4 с помощью стяжных элементов, например, болтов 6 и 7. Цешральный болт 12 в верхней части выполнен в виде полусферы, которая через силопередающий элемент 3 вбспришгмает измеряемое усилие Р. Обмотки 8 верхней и нижней пластин 5 включены в противоположные плечи измерительной Мостовой схемы (см. фиг. 4 и Это позволяет исключить нулевой сигнал, компенсируЪмый, при отсутствии усилия Р. восполнить аддитивную составляющую температурной погрешности, так как темпера турные изменения проницаемости обеих пластин будут одинаковы, а это также уменьшит погрешность гистерезиса, носкоп ку гистерезисные изменения хода характеристики растягиваемой и сжимаемой пластин также будут частично .компенсироваться в измерительной мостовой схеме. Датчик работает следующим образом. При воздействии усилия Р магнитопровод подвергается изгибу, -при в верх ней пластина 5 возникает напряжение сжа тия, а в нижней - растяжение. При одном И- том же усилии Р эти напряжения тем больше, чем меньше расстояние между пластинами 5, которое изм&няется с помощью пластин, закрепленных на соответствующей ступени немагнитных элементов 4 болтами 6. Так, например, при толщине 1шастин, равной 10 мм, щ& отверстий для обмоток 10 мм, ширине пластин 20 мм и расстоянием между центральным и боковым отверстиями для болтов 6 и 7, равным 65 мм, характериотики датчика следующие. Расстояния между пластинами 10 мм (первая ступень немагнитных элементов 4). При Р 8О кг в магнитопроводе возникают напряжения, равные ЮООкг/см (рассматриваемые как верхний предел измерений. Общий сигнал при этом будет равен сумме сигналов двух сжимаемых (верхняя пластина магнитоггоовода) и двух растягиваемых контуров (нижняя пластина магнитопровода), на каждагй из них действует .. нагру ягй в i кг i При расстояйи 2О мм (вторая сл711ейь;-нейагцйГньгх элементов те же режимы и тот же выходной сигнал будут получены при Р 130 кг, а при расстоянии 30 мм (третья ступень) - при Р 180 кг. В приведенных примерах не чтено ЕЭменение расстояния концевых упоров, увеличение которого способствует значительному повышению чувствительности, то ecTi возникновению в пластинах тех же напряжений при меньщих измеряемых усилиях. Формула изобретения Магнитоупругий датчик усилий, содержащий корпус с крышкой, в которой ВМО9тирован силопередаюший элемент, и магнитопровод в виде связанных по контуру немагнитными элементами пластеин с отвер стиямиДля размещения измерительных обмоток, включенных в измерительную схему, от л и ч а ю щи и с я тем, что, с целью повышения чувствительности и расширения, диапазона измеряемых усилий, в немагнитный элемент введены ступенчатые опорные площадки с отверстиями для пластин, которые закреплены стяжными элементами в виде болтов, и концевые упоры, устанавливаемые на ступевгчатых oifojaax корпуса. / I / 7 Э 5 fZ Фиг. 7 8Д-/1 i Ф(г.2 8
| название | год | авторы | номер документа |
|---|---|---|---|
| Силоизмерительный датчик | 1979 |
|
SU1004780A1 |
| Магнитоупругий датчик усилий | 1982 |
|
SU1049760A1 |
| Магнитоупругий преобразователь усилий | 1979 |
|
SU866425A1 |
| Магнитоупругий датчик усилия | 1980 |
|
SU861987A1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ МЕХАНИЧЕСКИХ УСИЛИЙ | 1998 |
|
RU2168709C2 |
| Магнитоупругий преобразователь усилий | 1982 |
|
SU1051391A1 |
| Дифференциальный магнитоупругий датчик давления | 1987 |
|
SU1437700A1 |
| Магнитоупругий преобразователь усилий | 1987 |
|
SU1483293A1 |
| Магнитоупругий преобразовательуСилий | 1979 |
|
SU832362A1 |
| МЕХАНОМАГНИТНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1994 |
|
RU2107901C1 |
Б-5
Ф1Л
J
