I
Изобретение относится к измерительной технике и может быть спользовано в системах автоматического измерения массы и усилий.
Известен преобразователь, предназначенный для измерения усилия, содержащий пластины с обмотками, одним концом закрепленные в стойке П.
Этот преобразователь имеет низкую точность.
Наиболее близким по технической сущности является монолитный дифференциально-дроссельный преобразователь усилия с изгибаемым магнитопроводом (консольно нагружае№1Й) 2.
Преобразователь усилия представляет собой четыре параллельно расположенные стержня, объединенные обпщми замкнутыми ярмами в единый элемент. Один конец датчика защемлен, а к другому прилагается измеряемое усилие в направлении, перпендикулярном продольной оси преобразователя и плоскости, в которой лежат пары смежных стержней. При этом в верхних стержнях возникают напряжения растяжения, а в нижних - сжатия. На всех четырех стержнях размещены одинаковые обмотки.
Недостатком этого датчика является его низкая чувствительность и точность измерения усилий, что объясtoняется распределением магнитных потоков.
Целью изобретения является повышение точности.
Эта цель достигается тем, что
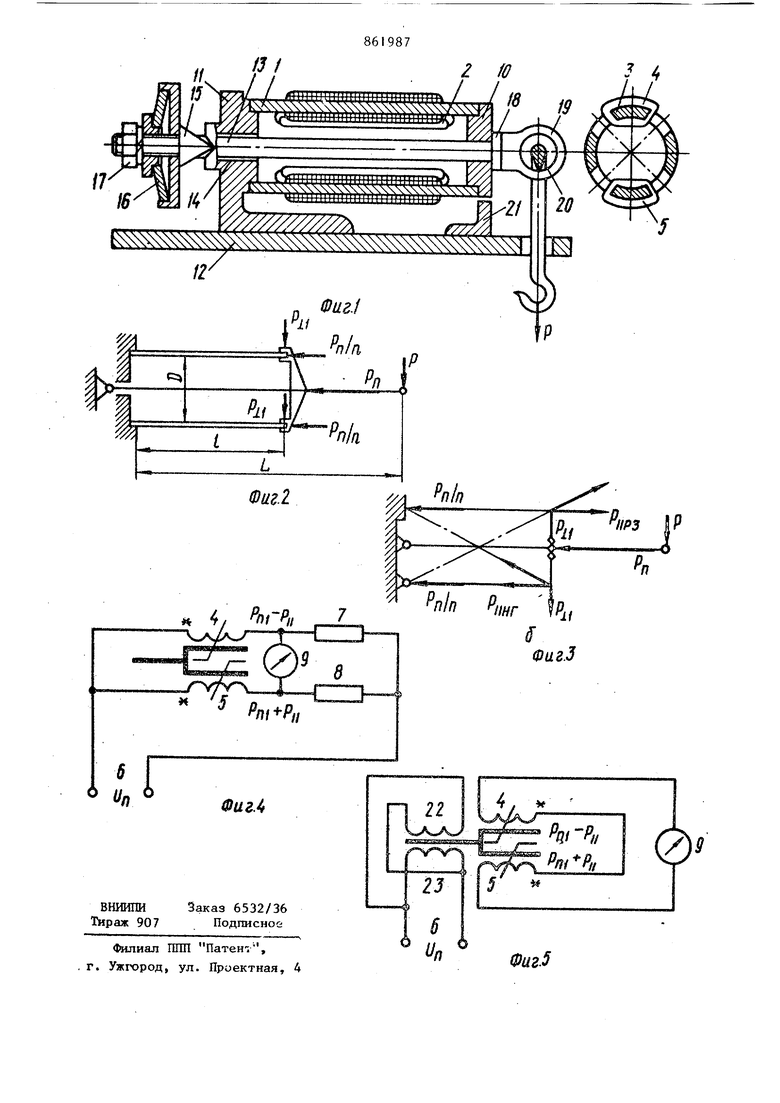
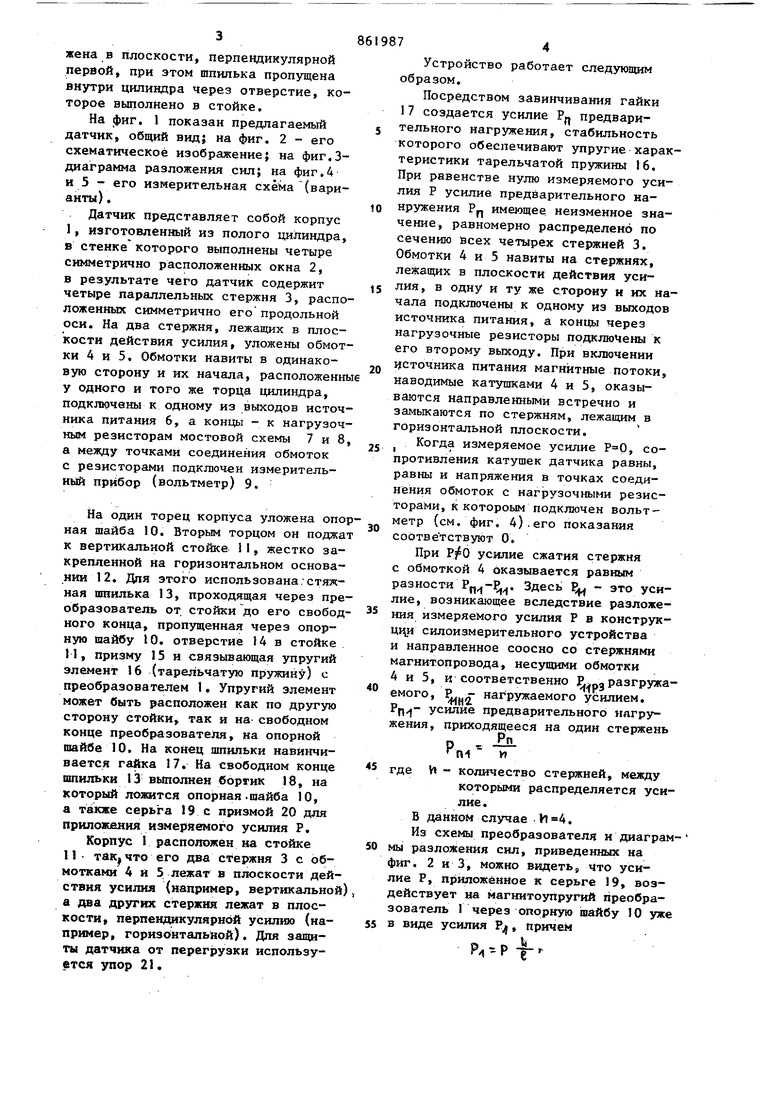
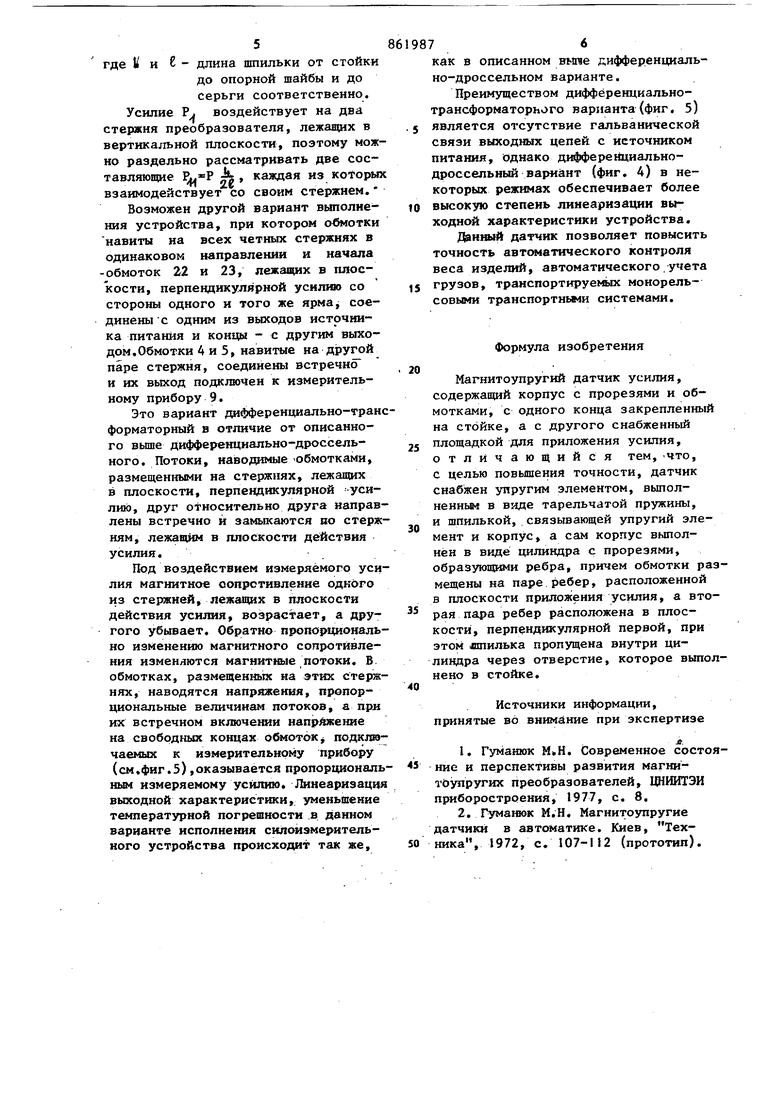
IS датчик снабжен упругим элементом, выполненным в виде тарельчатой пружины, и шпилькой, связьшающей упругий элемент и корпус, а сам корпус вьшолнен в виде цилиндра с прорезя20ми, образующими ребра, причем обмотки размещены на паре ребер, расположенной в плоскости приложения усилия, а вторая пара ребер расположена в плоскости, перпендикулярной первой, при этом шпилька пропущена внутри цилиндра через отверстие, которое выполнено в стойке. На фиг. 1 показан предлагаемый датчик, общий вид; на фиг. 2 - его схематическое изображение; на фиг.Здиаграмма разложения сил; на фиг.4 и 5 - его измерительная схема (варианты). Датчик представляет собой корпус 1, изготовленный из полого цилиндра, в стенке которого выполнены четыре симметрично расположенных окна 2, в результате чего датчик содержит четыре параллельных стержня 3, распо ложенных симметрично егопродольной оси. На два стержня, лежаащх в плоскости действия усилия, уложены обмот ки 4 и 5. Обмотки навиты в одинаковую сторону и их начала, расположенн у одного и того же торца цилиндра, подключены к одному из выходов источ ника питания 6, а концы - к нагрузоч ным резисторам мостовой схемы 7 и 8 а между точками соединения обмоток с резисторами подключен измерительный прибор (вольтметр) 9. На один торец корпуса уложена опо ная шайба 10. Вторым торцом он поджа к вертикальной стойке 1I, жестко закрепленной на горизонтальном основании 12. Для этого использована .-стяжная пгаилька 13, проходящая через пре образователь от стойки до его свобод ного конца, пропущенная через опорную шайбу 10. отверстие 14 в стойке М, призму 15 и связывающая упругий элемент 6 (тарельчатую пружин) с преобразователем 1. Упругий элемент может быть расположен как по другую сторону стойки так и на свободном конце преобразователя, на опорной шайбе 10. На конец шпильки навинчивается гайка 17. На свободном конце шпильки 13 выполнен бортик 18, на который лояится опорная.шайба 10, а также серьга 19с призмой 20 для приложения измеряемого усилия Р. Корпус I расположен на стойке 11- так.что его два стержня 3 с обмотками 4 а 5 лежат в плоскости дей ствия усилия (например, вертикально а два ApyrtfX стержня лежат в плоскости, перпендикулярной усилию (например , горизо нтальной). Для защиты датчика от перегрузки используется упор 21, 4 Устройство работает следующим образом. Посредством завинчивания гайки 17 создается усилие Pjj предварительного нагружения, стабильность которого обеспечивают упругиехарактеристики тарельчатой пружины 16. При равенстве нулю измеряемого усилия Р усилие предварительного нанружения Pj имеющее неизменное значение, равномерно распределено по сечению всех четырех стержней 3. Обмотки 4 и 5 навиты на стержнях, лежащих в плоскости действия усилия, в одну и ту же сторону и их начала подключены к одному из выходов источника питания, а концы через нагрузочные резисторы подключены к его второму выходу. При включении ijtCT04HHKa питания магнитные потоки, наводимые катушками 4 и 5, оказываются направленными встречно и замыкаются по стержням, лежащим в горизонтальной плоскости. Когда измеряемое усилие , сопротивления катушек датчика равны, равны и напряжения в точках соединения обмоток с нагрузочными резисторами, ккотороым подключен вольтметр (см. фиг. 4).его показания соответствуют 0. При усилие сжатия стержня с обмоткой 4 оказывается равным разности Р,,-. Здесь f - это усилие, возникающее вследствие разложения измеряемого усилия Р в конструкцци силоизмерительного устройства и направленное соосно со стержнями магнитопровода, несущими обмотки 4 и 5, и соответственно F.aРазгружа 4113емого, ffjun нагружаемого усилием. «2 усилие предварительного нпгру приходящееся на один стержень жения, Р, - П1 И где И - количество стержней, между которыми распределяется усилие, В данном случае . Из схемы преобразователя и диаграммы разложения сил, приведенных на фиг. 2 и 3, можно видеть, что усилие Р, приложенное к серьге 19, воздействует на магнитоупругий преобразователь Г через опорную {пайбу 10 уже в виде усилия Р, причем Р,--Р -|где li и 6 - длина шпильки от стойки до опорной шайбы и до серьги соответственно. Усилие Р воздействует на два стержня преобразователя, лежащих в вертикальной плоскости, поэтому мож но раздельно рассматривать две составляющие Р 5 каждая из которы взаимодействует со своим стержнем. Возможен другой вариант выполнения устройства, при котором охотки навиты на всех четных стержнях в одинаковом направлении и начала -обмоток 22 и 23, лежащих в плоскости, перпендикулярной усилию со стороны одного и того же ярма соединены С одним из выходов источника питания и концы - с другим выходом.Обмотки А и 5, навитые на другой паре стержня, соединены встречно и их выход подключен к измерительному прибору 9. Это вариант дифференциально-тран форматорный в отличие от описанного выше Дифференциально-дроссельного. Потоки, наводимые юбмотками, размещенными на стержнях, лежащих в плоскости, перпендикулярной усилию, друг относительно друга направ лены встречно и замыкаются но стерж ням, лежащим в плоскости действия усилия. Под воздействием измеряемого уси лия магнитное сопротивление одного из стержней, лежащих в плоскости действия усилия возрастает, а другого убывает. Обратно пропорциональ но изменению магнитного сопротивления изменяются магнитш 1е потоки. В обмотках, размещенньпс на этих сте нях, наводятся напряжения, пропорциональные величинам потоков, а пря их встречном включении напряжение на свободных концах обмоток подключаемых к измерительному прибору (см.фиг.5),оказывается пропорциональ ным измеряемому усилию Линеаризация выходной характеристики, еньшение температурной погрешности в данном варианте исполнения силоиэмерительного устройства происходит так же. 76 как в описанном вьпче дифференциально-дроссельном варианте. Преимуществом дифференциальнотрансформаторного варианта(фиг. 5) является отсутствие гальванической связи выходных цепей с источником питания, однако дифференциальиодроссельный вариант (фиг. 4) в некоторых режимах обеспечивает более высокую степень линеаризации выходной характеристики устройства. Даит)1й датчик позволяет повысить точность автстатического контроля веса изделий, автоматического.учета грузов, транспортируемэпс монорельсовыми транспортными системами. Формула изобретения Магнитоупругий датчик усилия, содержащий корпус с прорезями и обмотками, с одного конца закрепленный на стойке, а с другого снабженный площадкой для приложения усилия, отличающийся тем, -что, с целью повышения точности, датчик снабжен упругим элементом, выполненньм в виде тарельчатой пружины, и шпилькой, связывающей упругий элемент и корпус, а сам корпус выполнен в виде цилиндра с прорезями, образующими ребра, причем обмотки размещены на паре ребер, расположенной в плоскости приложения усилия, а вторая пара ребер расположена в плоскости, перпендикулярной первой, при этом 11шилька пропущена внутри цилиндра через отверстие, которое выполнено в стойке. Источники информации, принятые во внимание при экспертизе 1. Гумашок . Современное состояние и перспективы развития магнит& ругих преобразователей, ЦНИИТЭИ приборостроения, 1977, с. 8. 2. Гумашж М.Н. Магнитоупругие датчики в автоматике. Киев, Техника, 1972, с. 107-112 (прототип).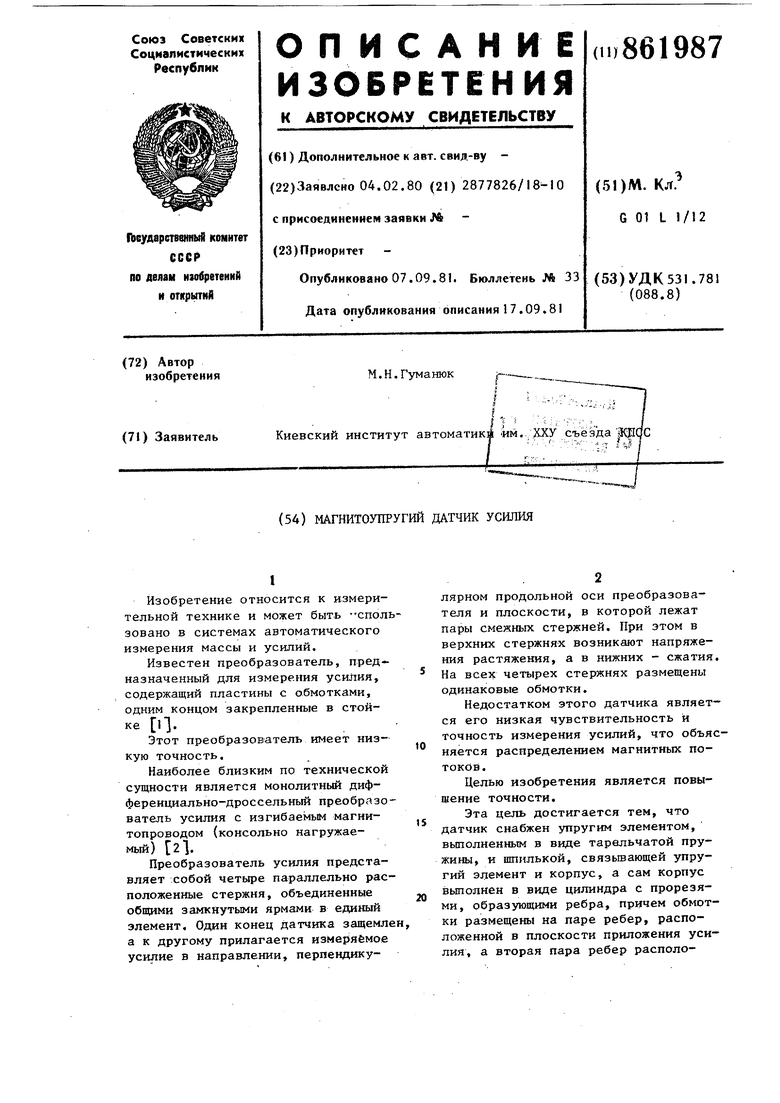
| название | год | авторы | номер документа |
|---|---|---|---|
| Силоизмерительное устройство | 1981 |
|
SU998877A1 |
| Силоизмеритель | 1982 |
|
SU1157372A1 |
| Динамометр | 1977 |
|
SU690332A1 |
| Силоизмерительное устройство | 1983 |
|
SU1170294A1 |
| Магнитоупругий дифференциальный дина-MOMETP | 1980 |
|
SU847081A1 |
| Магнитоупругий преобразователь усилий | 1979 |
|
SU866425A1 |
| Силоизмерительный датчик | 1979 |
|
SU1004780A1 |
| Магнитоупругий датчик давления | 1981 |
|
SU970151A1 |
| МАГНИТОУПРУГИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ИЗМЕРЕНИЙ УСИЛИЙ | 1966 |
|
SU184751A1 |
| Способ измерения сложных механических деформаций с помощью аморфной металлической ленты и устройство для калибровки чувствительного элемента | 2018 |
|
RU2708695C1 |