Изобретение относится к измерительной технике и может быть использовано для измерения вектора механической силы в двухкоординатной плоскости.
Известно устройство "Многокомпонентный стенд для измерения силомоментных нагрузок" (А. С. N 1633296 СССР, МПК, G 01 L 5/16, Бюллетень N 9, 1991 г.), содержащий основание с установленными на нем симметрично осям координат четырьмя равножесткими упругими элементами, шарнирно соединенными попарно двумя жесткими перемычками. Четыре двухшарнирные тяги, связывающие своими концами силомоментную раму с упругими элементами, вместе образуют пространственный параллелограмм-качалку. Между силоприемной рамой и основанием в геометрическом центре установлен преобразователь двух взаимно перпендикулярных сил.
Недостатком этого устройства является очень сложная система передачи сил, что уменьшает чувствительность и надежность измерительной системы.
Известно устройство "Трехмерный датчик для измерения магнитоупругих сил" (патент US N 5394756, МПК, G 01 L 1/12, РЖ ИСМ вып. 82, N 7, 1996 г.), содержащий полость для датчика, имеющую цилиндрический корпус круглого сечения и полусферические торцы. В корпус помещен магнитоупругий материал. Корпус имеет три зоны для измерения сил, равноотстоящие от центральной оси и симметрично распределенные внутри корпуса, каждая зона имеет отверстия, через которые проходят обмотки возбуждения и измерения.
Недостатками этого устройства являются большие габаритные размеры и материалоемкость, сложная конструкция.
Наиболее близким по технической сущности является устройство "Двухкоординатный измеритель натяжения" (А. С. N 1377631, СССР, G01L1/12, G01L5/04, МПК, Бюллетень N 8, 1988 г.), содержащий основание, на котором расположены магнитоупругие чувствительные элементы, выполненные в виде рамок, между которых находится измерительный ролик и силопередающий цилиндр. На сторонах рамок попарно размещены обмотки возбуждения и обмотки измерения, измеряющие горизонтальные и вертикальные компоненты вектора силы.
Недостатками прототипа являются большие габаритные размеры и сложность устройства.
Предлагаемое изобретение направлено на уменьшение габаритных размеров и повышение надежности за счет упрощения конструкции.
Поставленная задача достигается двухкоординатным преобразователем механических усилий, содержащим магнитоупругий чувствительный элемент, одну обмотку возбуждения и две обмотки измерения горизонтальной и вертикальной компоненты вектора силы, в котором в отличие от прототипа плоскость, в которой расположена обмотка измерения горизонтальной компоненты вектора силы, лежит на оси вертикальной компоненты вектора силы и повернута относительно оси горизонтальной компоненты вектора силы на угол 45o, а плоскость, в которой расположена обмотка измерения вертикальной компоненты вектора силы, лежит на оси горизонтальной компоненты вектора силы и повернута относительно оси вертикальной компоненты вектора силы на угол 45o.
Магнитоупругий чувствительный элемент может состоять из пластин электротехнической стали и быть скреплен с обеих сторон крышками с вырезными полостями для обмотки возбуждения и обмоток измерения.
Крышки могут быть выполнены цельными, для повышения чувствительности, линеаризации выходной характеристики и служить предохранителями от механических перегрузок.
На фиг. 1 представлен общий вид двухкоординатного преобразователя усилий.
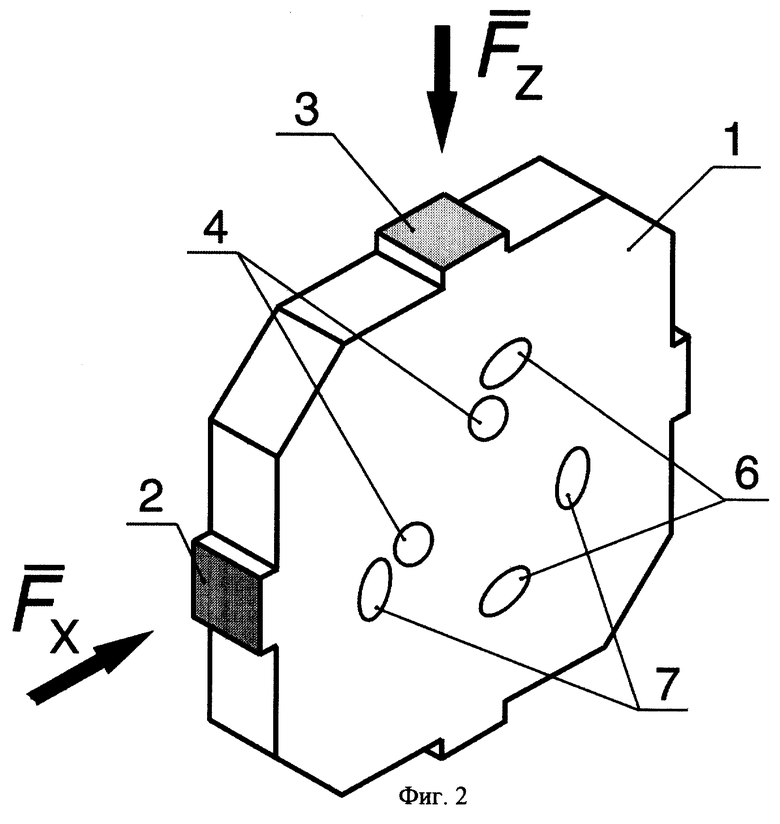
На фиг. 2 показан магнитоупругий чувствительный элемент с отверстиями для обмотки возбуждения и обмоток измерения.
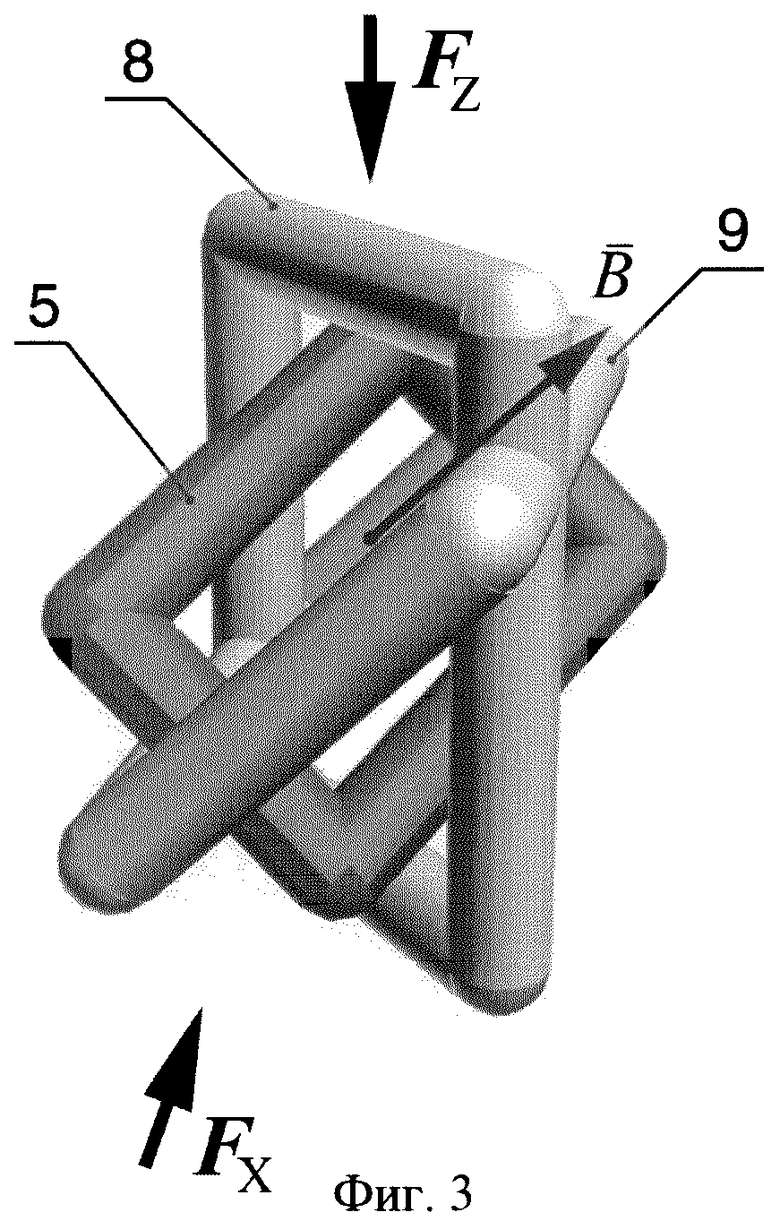
На фиг. 3 показано расположение обмотки возбуждения и обмоток измерения.
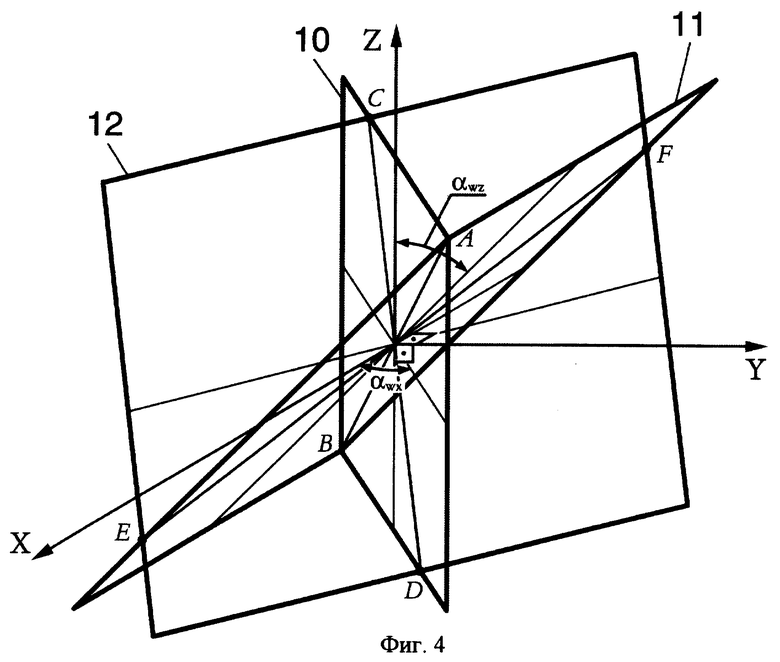
На фиг. 4 показаны плоскости расположения обмотки возбуждения и обмоток измерения.
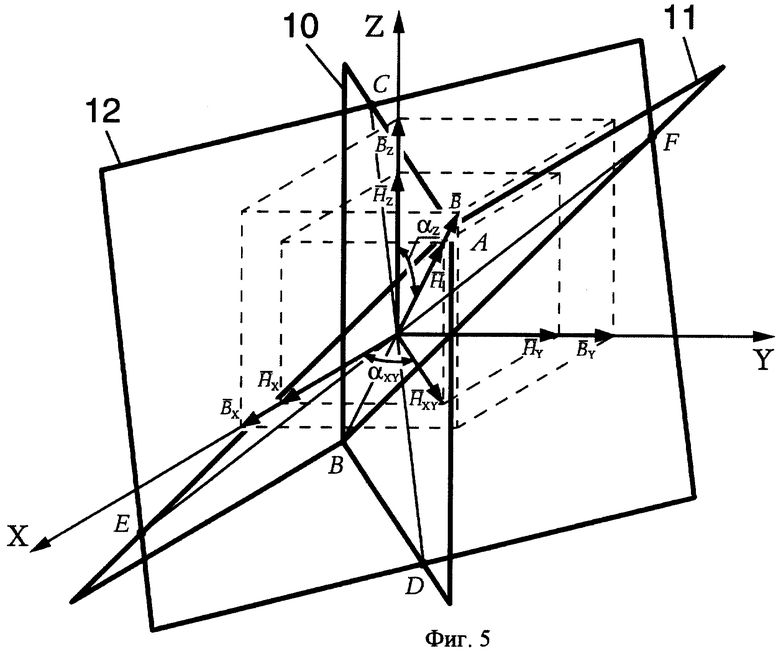
На фиг. 5 показаны вектора, характеризующие магнитное поле в преобразователе при отсутствии внешних механических сил.
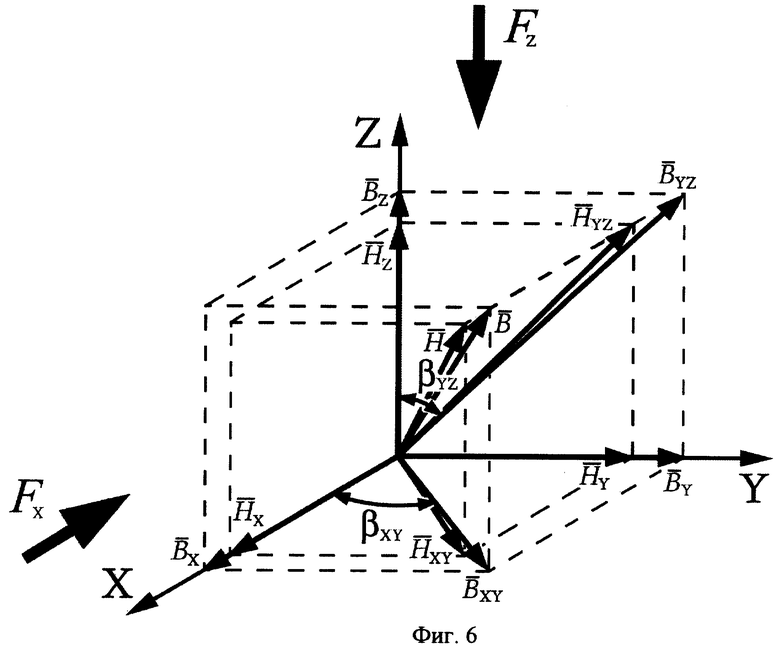
На фиг. 6 показаны вектора, характеризующие магнитное поле в преобразователе при воздействии внешних механических сил.
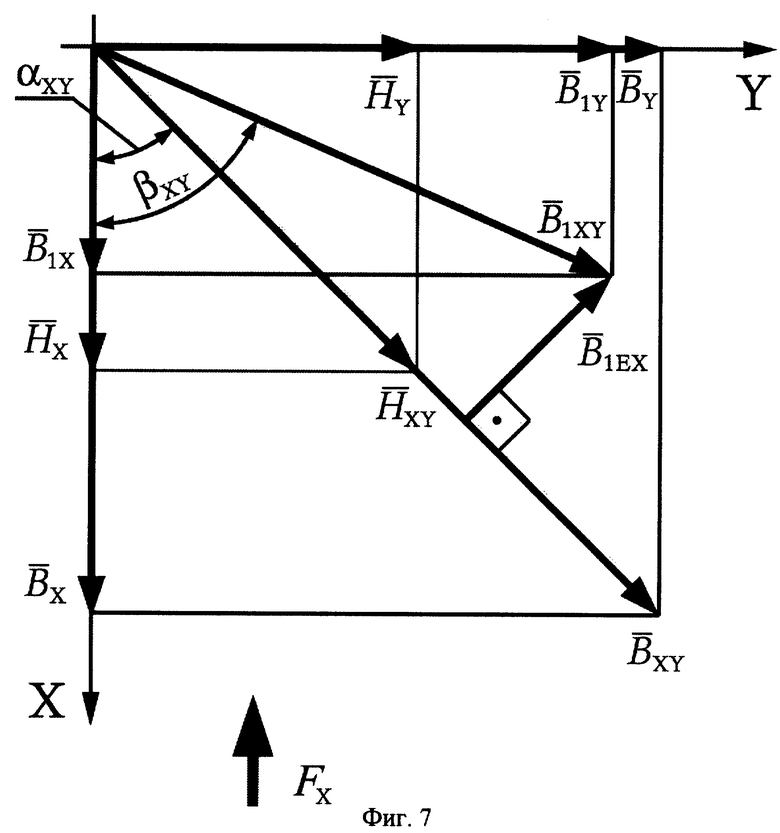
На фиг. 7 показаны проекции на плоскость XOY векторов, характеризующих магнитное поле в преобразователе при воздействии внешних механических сил.
Двухкоординатный преобразователь механических усилий содержит магнитоупругий чувствительный элемент 1, имеющий контактные площадки 2 и 3 в виде выступов, для направленной передачи горизонтальной FX и вертикальной FZ компонент. В магнитоупругом чувствительном элементе 1 имеются два отверстия 4 для обмотки возбуждения 5, два отверстия 6 для обмотки измерения 8 горизонтальной компоненты FX и два отверстия 7 для обмотки измерения 9 вертикальной компоненты FZ. Плоскость 10, в которой расположена обмотка измерения 8 горизонтальной компоненты FX лежит на оси вертикальной компоненты FZ и повернута относительно оси горизонтальной компоненты FX на угол αWX = 45° (фиг. 4), а плоскость 11, в которой расположена обмотка измерения 9 вертикальной компоненты FZ лежит на оси горизонтальной компоненты FX и повернута относительно оси вертикальной компоненты FZ на угол αWZ = 45°, линия AB, перпендикулярная плоскости 12, в которой расположена обмотка возбуждения 5 лежит на линии пересечения плоскостей 10 и 11 измерительных обмоток 8 и 9. Чувствительный элемент 1 может быть скреплен с обоих сторон крышками 13.
Двухкоординатный преобразователь механических усилий работает следующим образом.
В основе принципа действия предлагаемого устройства лежит анизотропия магнитных свойств, возникающая в материале под действием внешних механических сил.
Обмотка возбуждения 5, питаемая переменным электрическим током, в магнитопроводе, состоящем из магнитоупругого чувствительного элемента 1 и крышек 13, возбуждает переменное электромагнитное поле, которое по своему воздействию на измерительные обмотки 8 и 9 может быть охарактеризовано вектором магнитной индукции B (фиг. 5), который при равных нулю измеряемых горизонтальной FX и вертикальной FZ компонент, лежит на линии AB пересечения плоскостей 10 и 11, расположения измерительных обмоток 8 и 9. При этом проекции B1EX и D1EZ вектора магнитной индукции B на нормали к плоскостям 10 и 11, расположения измерительных обмоток 8 и 9, равны нулю по модулю. Это означает, что ЭДС не наводится в измерительных обмотках при отсутствии измерительных компонент FX и FZ.
При приложении горизонтальной компоненты FX или вертикальной компоненты FZ (фиг. 6), к соответствующим контактным площадкам 2 или 3, изменяются магнитные проницаемости в направлении осей X, Y и Z, в продольном и поперечных направлениях, относительно направлений прилагаемых сил. При этом изменение магнитной проницаемости в направлении прилагаемой силы больше, чем в направлениях, перпендикулярных направлению прилагаемой силы. Вследствие этого происходит поворот результирующего вектора магнитной индукции B в пространстве преобразователя (фиг. 6). Таким образом, изменяются величины проекций B1EX (фиг. 7) и B1EZ результирующего вектора магнитной индукции B на нормали к соответствующим обмоткам измерения 8 и 9. Проекции B1EX и B1EZ результирующего вектора магнитной индукции B наводят ЭДС в измерительных обмотках.
Предлагаемое устройство может быть использовано для измерения вектора механической силы в двухкоординатной плоскости, в системах управления, сигнализации и телеизмерения, где необходима высокая надежность устройства и малые габаритные размеры измерительного преобразователя.
Таким образом, по сравнению с прототипом заявляемое устройство для измерения вектора механических усилий в двухкоординатной плоскости имеет следующие преимущества:
1) меньшие геометрические размеры устройства и материалоемкость;
2) повышение надежности устройства за счет уменьшения количества обмоток.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения сложных механических деформаций с помощью аморфной металлической ленты и устройство для калибровки чувствительного элемента | 2018 |
|
RU2708695C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОЛНОГО ВЕКТОРА МАГНИТНОГО ПОЛЯ, А ТАКЖЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2218577C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| ПРЕОБРАЗОВАТЕЛЬ К ДЕФЕКТОСКОПУ ДЛЯ ТЕПЛОВОГО КОНТРОЛЯ | 1990 |
|
RU2088897C1 |
| ТУРБИННЫЙ РАСХОДОМЕР | 2000 |
|
RU2182660C2 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ИСПЫТАНИЙ ДВУХКОМПОНЕНТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ МЕХАНИЧЕСКИХ СИЛ | 2000 |
|
RU2196310C2 |
| МАГНИТОУПРУГИЙ МАГНИТОИЗОТРОПНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2345336C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2252422C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОКА | 1998 |
|
RU2147131C1 |
| Функциональный преобразователь силы | 1978 |
|
SU787915A1 |
Изобретение относится к измерительной технике и может быть использовано в системах управления, сигнализации и телеизмерения. Преобразователь представляет собой магнитоупругий чувствительный элемент, содержащий обмотку возбуждения и две обмотки измерения. Плоскость, в которой расположена обмотка измерения горизонтальной компоненты вектора силы, лежит на оси вертикальной компоненты вектора силы и повернута относительно оси горизонтальной компоненты вектора силы на угол 45°. Плоскость, в которой расположена обмотка измерения вертикальной компоненты вектора силы, лежит на оси горизонтальной компоненты вектора силы и повернута относительно оси вертикальной компоненты вектора силы на угол 45°. Вектор нормали плоскости, в которой расположена обмотка возбуждения, параллелен линии пересечения плоскостей измерительных обмоток. За счет расположения обмоток в ортогональных плоскостях уменьшаются геометрические размеры преобразователя и количество обмоток и повышается надежность преобразователя. 2 з.п. ф-лы, 7 ил.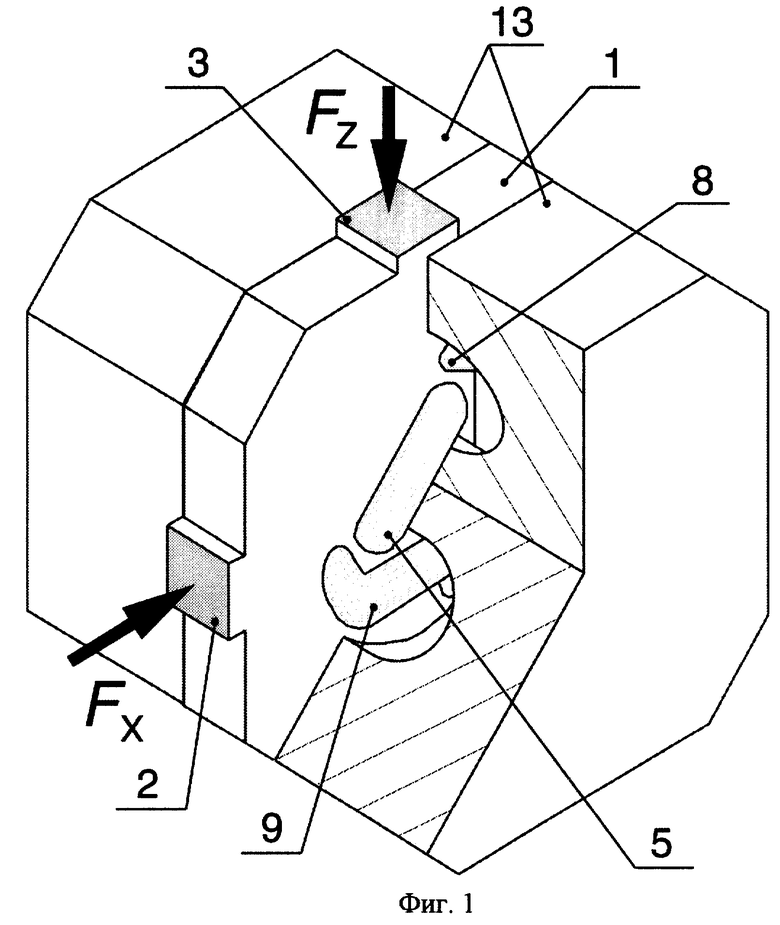
| Устройство для измерения составляющих сил | 1974 |
|
SU504949A1 |
| Двухкоординатный измеритель натяжения | 1986 |
|
SU1377631A1 |
| US 5394756 A1, 07.03.1995 | |||
| Магнитоупругое силоизмерительное устройство | 1988 |
|
SU1597615A1 |
| ГИНЗБУРГ В.В | |||
| Магнитоупругие датчики | |||
| - М.: Энергия, 1970, с | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
