1
Изобретение относится к области измерительной техники и может быть использовано в инерциальных системах навигации и управления.
Известны датчики ускорений, содержащие минимум одну пару струн, каждая из которы одним концом соединена с корпусом датчика, а другим - с упругим элементом, внутри которого размещена жидкая инерционная масса, каждая из струн снабжена элементом возбуждения и съема сигнала колебаний 1J 2. Использование двух жидких инерционных масс позволяет уменьшить взаимное влияние колебаний струн,и связанное с ним явление захвата, но усложняет конструк1ШЮ датчика.
Наиболее близким по технической сущности является датчик, содержащий минимум одну пару струн, каждая из которых одним концом соединена с корпусом датчика, другим - с общей инерционной массой и снабжена элементами возбуждения и съема сигнала з.
Эти датчики для получения максимально возможной (по ycлoвия ij) струн и
максимальным измеряемым ускорением) чувствительности снабжены большой инерционной массой, которая в значительной степени определяет их большой вес. Недостатком последнего из указанных i датчиков, кроме того, является наличие широкой зоны нечувствительности, обусловленной явлениеЫ захвата, определяемым взаимным влиянием колебаний струн, снижающей точность измерений.
Цель изобретения - снижение веса датчикаи повышение его чувствительности.
Это достигается тем, что датчик снабжен подвижно закрепленным в корпусе рычагом, длинное плечо которого соединено с инерционной массой, а короткое - со струнами, направления колебаний которых взаимно перпендикулярнъ.
С целью уменьшения взаимного влияния колебаний струн, возбуждение сгрун производят в двух взаимно перпендикулярных плоскостях.
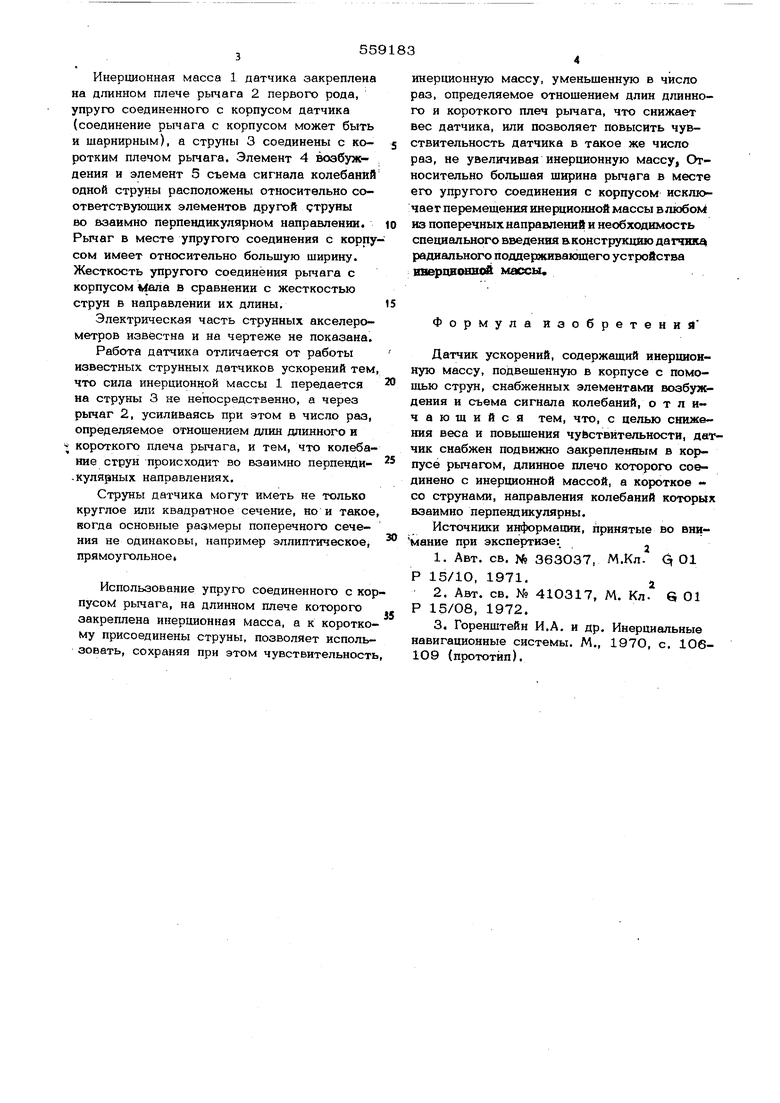
На чертеже показан обший вид струнного датчика ускорений. Инерционная масса I датчика закреплена на длинном плече рьмага 2 первого рода, упруго соединенного с корпусом датчика (соединение рычага с корпусом может быть и шарнирным), а струны 3 соединены с коротким плечом рычага. Элемент 4 воэбуждения и элемент 5 съема сигнала колебаний одной струны расположены относительно соответствующих элементов другой струны во взаимно перпендикулярном направлении4 Рычаг в месте упругого соединения с корпу сом имеет относительно большую ширину. Жесткость упругого соединения рычага с корпусом Мала в сравнении с жесткостью струн в направлении их длины, Электрическая часть струнных акселерометров известна и на чертеже не показана. Работа датчика отличается от работы известных струнных датчиков ускорений тем что сила инерционной массы 1 передается на струны 3 не непосредственно, а через рычаг 2, усиливаясь при этом в число раз, определяемое отношением длин длинного и короткого плеча рычага, и тем, что колебание струн происходит во взаимно перпенди-кулярных направлениях. Струны датчика могут иметь не только круглое или квадратное сечение, но и такое когда основные размеры поперечного сечения не одинаковы, например эллиптическое, прямоугольное Использование упруго соединенного с кор пусом рычага, на длинном плече которого закреплена инерционная масса, а к короткому присоединены струны, позволяет использовать, сохраняя при этом чувствительность инерционную массу, уменьшенную в число раз, определяемое отношением длин длинного и короткого плеч рычага, что снижает вес датчика, или позволяет повысить чувствительность датчика в такое же число раз, не увеличивая инерционную массу, Относительно большая ширина рычага в месте его упругого соединения с корпусом исключает перемешения инерционной массы в любом из поперечных иаправлений и необходимость специального введения вконструкцию дагчнк радиального поддерживающего устройства вверциовшА массы. Формула изобретений Датчик ускорений, содержащий ииершюиную массу, подвешенную в корпусе с помощью струн, снабженных элементами возбуждения и съема сигнала колебаний, отличающийся тем, что, с целью снижения веса и повышения чуЬствйтельиости, датчик снабжен подвижно закрепленным в корпусе рычагом, длинное плечо которого соединено с инерционной массой, а короткое со струнами, направления колебаний которых взаимно перпендикулярны. Источники информации, принятые во виимание при экспертизе: 1.Авт. св. № 363037, М.Кл. Q О1 Р 15/1О, 1971.2 2.Авт. св. № 410317, М. Кл. G, 01 Р 15/08, 1972. 3.Горенштейн И.А. и др. Инерциальные навигационные системы. М., 197О, с. 1О6109 (прототип).
i
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИФФЕРЕНЦИАЛЬНЫЙ СТРУННЫЙ АКСЕЛЕРОМЕТР И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2004 |
|
RU2258230C1 |
| Акселерометр | 1975 |
|
SU535513A1 |
| АКСЕЛЕРОМЕТР | 1988 |
|
RU2046347C1 |
| ДВУХКООРДИНАТНЫЙ СТРУННЫЙ НАКЛОНОМЕР | 2004 |
|
RU2287777C2 |
| Датчик угловых ускорений | 1973 |
|
SU475553A1 |
| ТРЕХКОМПОНЕНТНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ СТРУННЫЙ АКСЕЛЕРОМЕТР | 1995 |
|
RU2101712C1 |
| СПОСОБ ГРАВИМЕТРИЧЕСКИХ ИЗМЕРЕНИЙ И СТРУННЫЙ ГРАВИМЕТР | 2007 |
|
RU2342683C2 |
| Способ компенсации погрешности от углового ускорения основания для кориолисова вибрационного гироскопа с непрерывным съёмом навигационной информации | 2016 |
|
RU2659097C2 |
| ЛИНЕЙНЫЙ АКСЕЛЕРОМЕТР | 2024 |
|
RU2837037C1 |
| АКСЕЛЕРОМЕТР | 1986 |
|
SU1840348A1 |
5 V
ff
