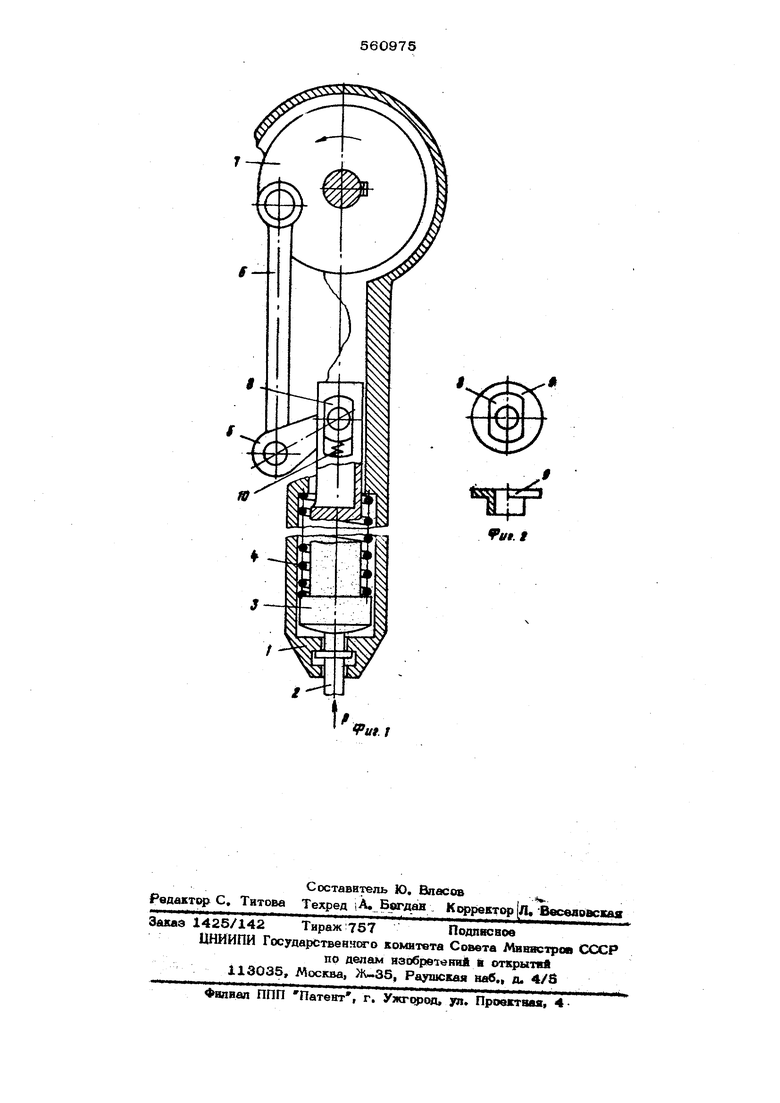
свободному перемещенвю в прорезях вдоль оси бойка. Ударный механизм рсЗотает спечуюшим образом. Рабочий инструмент 2 под действием силы Р .перемещается до упора буртиком в корпус 1 и при этом перемешает вверх ббек 3 вместе с сухарвкамн 8, предварительно деформируя njp; жин 4. Расстояние осью сухариков 8 и осью кривошипа 7 уменьшается и изменяется-зона раэ Маха коромысла 5. 6 н)нем крайнем положении кривошипй 7 се оси шарниров рычажного захвата брй располагаются на одной .прямой. При этом коромысло 5 ложится на плоскость бойка 3 и не может врашаться вокруг своей оси по часовой стрелке. Если в 9TOM положении звеньев шарнирно рычажного захвата бапьшого пё1: емёшения бийка 3 в Hanpai лении оси кривошипа 7 наруилает ся условие й1эоворачиваемосг(1 кривошипа 7, то коромысло 5 мзСте с сухариКакш 8 сдвигается в бойка 3 отвосйтельао последяег0,,вефррКШ{ у В| упругя9 элементы 10. пррходйгг Вижнее крайнее .положена, и;|Вухв.Я« в дод .действием упФугих апемва гоб; 1р:4одвр«1равются б исход кое Яйложекие. AaJUi &ifieei апёние криво шипа 7 обеспечивает взвод бойка 3 и деформацию пружины 4 на величину, | равную двум длинам кривошипа 7. После прохождения кривошипом 7 верхнего крайнего положения коромысло 5 поворачивается против часовой стрелки осво бождая боек 3, П12следний разгоняется под действием силы пружины 4, наносит удар по рабочему инструменту и возвращается в исходное положение. Затем цикл работы ударного механизма повтоояатся. Формул а изобретения Ударный механв&м, содержащий корпус, боек, ползун, пружину, шарнирно-рычажный захват бойка.и рабочий инст;1умент, о тличающийся тем,, что, с целью повьпиенвя анергия единичного удара путем умЗЕ1ьшения паразитной массы ползуна, пос лед НИИ выполнен в виде подпружиненных сухариков, которые размешены в теле бойка и кинематически связаны с шарШ1рш -{)ы4аж ными захватом i Источники информации, хфинйтые so внимание при экспертизе: 1 Авторское Свидетельство N) 109683, 8й. Е 21C 3/08, 1991. 2. Мехавнка Исследова&ве и совершено вовавве буролыгых машин. Трудам ФОИ, еып. 84, Фрунзе 974, с. ia-17.
1
fu91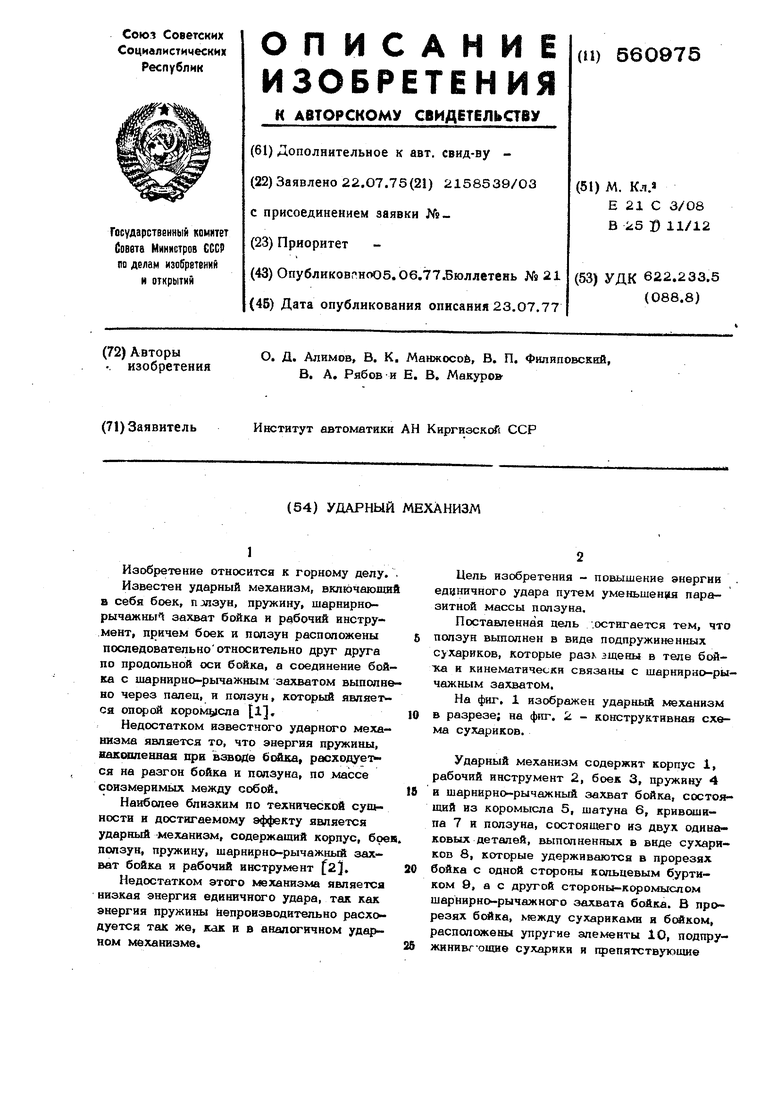
| название | год | авторы | номер документа |
|---|---|---|---|
| Ударный механизм с переменным дезаксиалом | 1977 |
|
SU695808A1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| Механический молот | 1983 |
|
SU1120097A1 |
| СПОСОБ СОЗДАНИЯ АДАПТИРОВАННОГО УДАРА ПРИ ЗАГЛУБЛЕНИИ ИНСТРУМЕНТА В ПОРОДУ И УДАРНЫЙ МЕХАНИЗМ ДВС С ФОРСИРУЕМОЙ ЭНЕРГИЕЙ И МОЩНОСТЬЮ | 2008 |
|
RU2411359C2 |
| Машина ударного действия | 1986 |
|
SU1359109A1 |
| Устройство ударного действия | 1977 |
|
SU720147A1 |
| УДАРНЫЙ МЕХАНИЗМ | 2006 |
|
RU2343280C2 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ ОБРАЗЦА МАТЕРИАЛА НА УСТАЛОСТЬ | 1991 |
|
RU2029282C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПЕРФОРАТОР | 1967 |
|
SU428082A1 |
| Машина ударного действия | 1981 |
|
SU1016153A1 |