Изобретение относится к механическим устройствам для создания циклических ударов рабочего органа по обрабатываемому им испытываемому на вибрацию объекту и может найти применение, например, в камнеобрабатывающих станках, перфораторах, трамбовках и вибросмесителях или, например, в стендах для виброиспытаний на удар различной измерительной аппаратуры и установках для чеканки.
Известен виброударный механизм перфоратора, содержащий замкнутую кинематическую цепь с приводным двигателем, сообщающим вращение в разные стороны двум шарнирно-установленным на подвижной раме зубчатым колесам с неуравновешенными дисбалансами и рабочим органом для забивки свай в грунт (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение. 1987. С. 481) - аналог №1.
Недостатками такого механизма являются:
а) сложность конструкции;
б) передача создаваемых неуравновешенными дисбалансами больших динамических ударных усилий через опорные подшипники зубчатых колес, что снижает срок их службы: низкая частота создаваемых ударов ограничивает производительность перфоратора.
Также известен вибрационный механизм, содержащий замкнутую кинематическую цепь с приводным двигателем. включающую кривошипно-ползунный механизм с установленным один внутри другого двойным шарнирно-поворотным цилиндром с поршнем, на котором закреплена трамбовочная площадка с двухсторонне-подпружиненным устройством (Крайнев А.Ф. Механика машин: Фундаментальный словарь. - М.: Машиностроение. 2000. с. 728) - аналог №2.
Недостатками ударного вибрационного механизма являются сложность конструкции многократного цилиндра с подпружиненным поршнем, и возможность заклинивания (под действием создаваемых вибрации) двойных поступательных кинематических пар при движении одного цилиндра внутри другого цилиндра.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению, является ударный механизм с гидравлическим устройством регулирования прямого и обратного хода, система управления которым включает датчики положения, скорости и ускорения рабочего инструмента и управляющий элемент с распределителем потока жидкости, поступающей из напорного трубопровода и удаляющей через сливной трубопровод в маслобак (Ешуткин Д.Н и др. «Структурный синтез органов управления машин ударного действия» // Материалы V международ. конф. «Проблемы механики современных машин», - Улан-Удэ: Изд-во ВСГТУ. Том 1. 2012. С. 199, рис. 1) - прототип.
Недостатками указанного ударного механизма являются:
1. Сложная конструкция машины ударного действия, включающая:
а) ударный механизм:
б) набор различных датчиков контроля движения рабочего органа:
в) управляющий элемент для устойчивости ударных режимов.
2. Очень низкий к.п.д. (30-40%) из-за преобразования гидравлической энергии источника питания в механическую энергию ударного бойка.
3. Частота ударов ограничена и не может превышать частоту со приводного двигателя.
В основу изобретения положена техническая задача, заключающаяся в:
а) упрощении конструкции (за счет применения простых в изготовлении и надежно работающих цилиндрических шарниров);
б) повышении коэффициента полезного действия - КПД (за счет исключения потерь от преобразования гидравлической энергии источника питания в механическую энергию ударного инструмента);
в) обеспечении устойчивых циклических ударных режимов работы без применения сложной системы обратной связи (как в прототипе гидроотбойника);
г) увеличение частоты ударов при установке низкочастотного приводного двигателя.
Получение технического результата достигается за счет того, что предлагаемый шарнирный виброударный механизм содержит замкнутую кинематическую цепь с приводным вращательным двигателем, выполненную в виде основного кривошипно-коромыслового механизма с подвижно соединенными между собой через цилиндрические шарниры рычажными звеньями в виде ведущего кривошипа, шатуна, коромысла и стойки, в котором длина ведущего кривошипа и шатуна равна сумме длин коромысла и стойки, коромысло и стойка выполнены одинаковой длины, а длина шатуна равна устроенной длине ведущего кривошипа.
Сущность изобретения поясняется чертежами на фиг. 1,фиг. 2,фиг. 3,фиг. 4 и фиг. 5.
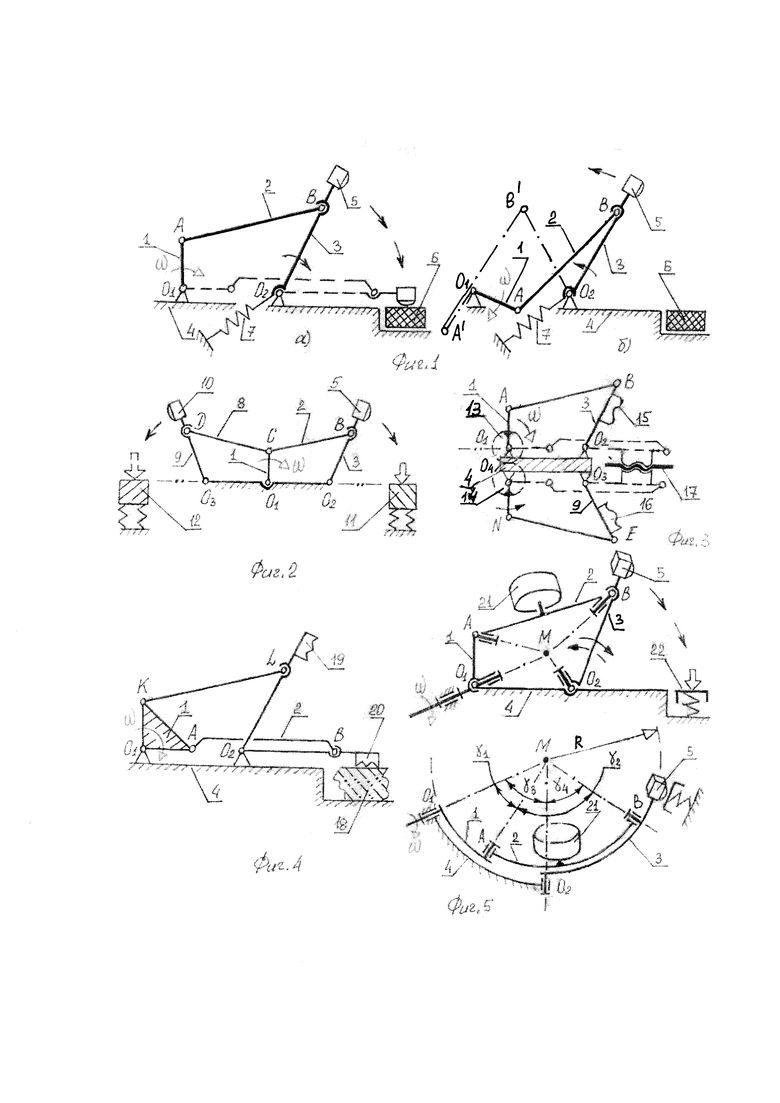
На фиг. 1 изображен общий вид шарнирного виброударного механизма, содержащего замкнутую кинематическую цепь с приводным двигателем, которая выполнена в виде основного кривошипно-коромыслового механизма O1ABO2 с подвижно соединенными между собой (через цилиндрические шарниры O1, А, В и O2) рычажными звеньями 1, 2, 3 и 4 в виде ведущего кривошипа 1 (вращающегося с угловой скоростью ω), шатуна 2, коромысла 3 и стойки 4. В указанной кинематической цепи сумма длины O1A ведущею кривошипа 1 и длины АВ шатуна 2 равна сумме длины O2B коромысла 3 и длины O1O2 стойки 4, т.е.
(О1А+АВ)=(O2B+O1O2);
коромысло 3 и стойка 4 выполнены одинаковой длины (O2B=O1O2), а длина АВ шатуна 2 равна утроенной длине О1А ведущего кривошипа 1 (АВ=3⋅О1А) для образования при сборке механизма компактного равностороннего треугольника со сторонами О1О2=О2В=В'O1, где B'O1=AB-O1A.
Коромысло 3 выполнено с возможностью закрепления на нем рабочею органа 5 (например, в виде ударного бойка), создающего ударное воздействие на выходе в крайнем положении кривошипно-коромыслового механизма, возникающем при расположении на одной прямой линии O1O2 всех его рычажных звеньев 1, 2, 3, 4 и установленного на стойке 4 ограничителя 6 углового внутрициклового поворота коромысла 3 (на рис. 1.а) это крайнее положение данного механизма показано пунктиром). Кроме того, коромысло 3 выполнено с возможностью его соединения со стойкой 4 через упругий элемент 7, который может быть выполнен, например, в виде упругого торсионного вала или в виде винтовой пружины кручения или растяжения или сжатия, выполненной цилиндрической или конической формы.
Ведущий кривошип 1 выполнен в виде одноплечего двухшарнирного рычага длиной O1A, у которого один конец через шарнир O1 соединен со стойкой 4, другой конец через шарнир А соединен с шатуном 2, а стойка 4 выполнена в виде двухшарнирного звена O1O2.
Цилиндрические шарниры О1, А, В и O2 замкнутой кинематической цепи выполнены с параллельными между собой осями вращения соединяемых рычажных звеньев 1, 2. 3 и 4, а замкнутая кинематическая цепь может быть выполнена со входной кинематической парой привода от вращательного двигателя, совмещенной с цилиндрическим шарниром О1 (расположенным между ведущим кривошипом 1 и стойкой 4), или совмещенной с цилиндрическим шарниром А (расположенным между ведущим кривошипом 1 и шатуном 2), а привод с вращательным двигателем выполнен с возможностью регулирования угловой скорости ω ведущего кривошипа 1.
На фиг. 2 представлен вариант выполнения шарнирного виброударного механизма, в котором стойка O3O1O2 выполнена в виде трехшарнирного звена с расположением всех его трех шарниров O3, О1, O2 на одной прямой линии O3O2, а ведущий кривошип 1 выполнен в виде одноплечего рычага с расположенным на его конце двойным цилиндрическим шарниром С для соединения между собой и с ведущим кривошипом 1 шатуна 2 основного кривошипно-коромыслового механизма и дополнительного шатуна 8, образующего через шарнир D и дополнительное коромысло 9 вместе со стойкой O3O1O2 дополнительный кривошипно-коромысловый механизм с установленным на дополнительном коромысле 9. дополнительным рабочим органом 10, для образования двухпозиционной виброударной установки для ударного нагружения двух разных объектов 11 и 12 рабочими органами 5 и 10,установленными на коромыслах 3 и 9.
На фиг. 3 представлен вариант выполнения шарнирного виброударного механизма, в котором стойка выполнена в виде четырехшарнирного звена O1O2O3O4, а ведущий кривошип 1 основного кривошипно-коромыслового механизма и ведущий кривошип O1N дополнительного кривошипно-коромыслового механизма кинематически связаны между собой через приводное зацепление двух зубчатых колес 13 и 14 с одинаковым числом зубьев, сблокированных с упомянутыми кривошипами 1 и O1N, для образования установки чеканки тонкостенных изделий за счет встречного ударного взаимодействия двух рабочих органов 15 и 16 через обрабатываемый листовой материал 17.
На фиг. 4 представлен вариант выполнения шарнирного виброударного механизма, в котором ведущий кривошип 1 выполнен в виде одноплечего трехшарнирного рычага O1AK треугольной формы, который через шарнир О1 соединен со стойкой 4, а через два других шарнира А и K соответственно соединен с шатуном 2 основного кривошипно-коромыслового механизма и с шатуном KL дополнительного кривошипно-коромыслового механизма для образования установки виброударного бучардирования камня 18 (например, в виде гранитных бордюров) с рабочими органами в виде бучард 19 и 20, ось углового поворота O2 которых расположена параллельно обрабатываемой поверхности.
На фиг. 5 представлен вариант выполнения шарнирного виброударного механизма, в котором цилиндрические шарниры О1, А, В и О2 выполнены с пересекающими между собой в одной точке М осями вращения соединяемых рычажных звеньев 1, 2, 3 и 4, для образования пространственного виброударного смесителя, в котором шатун 2 выполнен с возможностью закрепления на нем месильной емкости 21, стойка 4 снабжена упругим упором 22, который при угловом повороте коромысла 3 взаимодействует с установленным на коромысле 3 ударным бойком 5 в крайнем положении упомянутого шарнирного виброударного механизма, а все звенья шарнирного виброударного механизма для перемещения по сферической поверхности с радиусом R из упомянутой точки М выполнены со следующим суммарным соотношением:
γ1+γ2=γ3+γ4.
углов между пересекающимися осями шарниров соответственно ведущего кривошипа (угол γ1), шатуна (угол γ2), коромысла (γ3) и стойка (угол γ4).
Работа представленного шарнирного виброударного механизма заключается в следующем.
Задаваемое приводным вращательным двигателем вращение ведущего кривошипа 1 через рычажные звенья 1, 2 и 3 со скоростью ω преобразуется в угловые колебания коромысла 3 с ударами в крайнем положении рабочего органа 5 по внешнему объекту (обрабатываемой поверхности, испытуемым объектам 11 и 12 или по ограничителю 6). Для механизмов на фиг. 1, фиг. 3. и фиг. 5 частота возникающих ударов равна угловой скорости ω ведущего кривошипа 1 (т.е. за один оборот ведущего кривошипа 1 происходит один удар рабочего органа 5).
В механизме на фиг. 2, содержащем два рабочих органа 5 и 10, а также на механизме на фиг. 4, содержащем тоже два рабочих органа 19 и 20 - за полный оборот ведущего кривошипа 1 эти два рабочих органа будут создавать два (сдвинутых по фазе) удара и поэтому в механизмах на фиг. 2 и фиг. 4 частота ударного воздействия будет в два раза больше угловой скорости ω ведущего кривошипа 1.
За полный цикл колебательного движения коромысла 3, соединенного со стойкой 4 посредством упругого элемента 7 - сначала при угловом повороте коромысла 3 в одну сторону (т.е. против часовой стрелки на фиг. 1,б) происходит упругая деформация элемента 7 и накопление в нем потенциальной энергии), затем (во второй части цикла) при угловом повороте кривошипа 3 в другую сторону происходит отдача этой энергии и ее суммирование с подводимой энергией от приводного двигателя - что увеличивает силу создаваемых ударов.
Достигаемый в предлагаемом шарнирном виброударном механизме положительный эффект заключается в следующем:
1. Упрощение конструкции (за счет применения простых и надежных в работе цилиндрических шарниров).
2. Повышение КПД (за счет исключения преобразований одного вида энергии, например, в другой вид энергии, как в гидроотбойниках).
3. Создание виброударных режимов работы с простым регулированием частоты и силы ударов за счет изменения угловой скорости ведущего кривошипа 1 в его приводе от вращательного двигателя (при отсутствии сложной системы обратной связи для управления потоком жидкости - как в указанном прототипе с гидроотбойником).
4. Возможность (за счет применения в виброударных механизмах многошарнирного ведущего кривошипа, например, как на фиг. 4) увеличения частоты создаваемых ударов при установке низкооборотного приводного двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| ШАРНИРНЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ | 2020 |
|
RU2740526C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 2024 |
|
RU2833554C1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2020 |
|
RU2750997C1 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ УГЛА ВЫСТОЯ ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 2005 |
|
RU2285168C1 |
Изобретение относится к области машиностроения, а более конкретно к виброударным механизмам. Шарнирный виброударный механизм содержит замкнутую кинематическую цепь с приводным вращательным двигателем. Кривошипно-коромысловый механизм выполнен с подвижно соединенными между собой через цилиндрические шарниры ведущим кривошипом, шатуном, коромыслом и стойкой, где коромысло и стойка выполнены одинаковой длины. Длина шатуна равна устроенной длине ведущего кривошипа, а коромысло соединено с ударным рабочим органом и связано со стойкой посредством упругого элемента. Достигается упрощение конструкции. 9 з.п. ф-лы, 5 ил.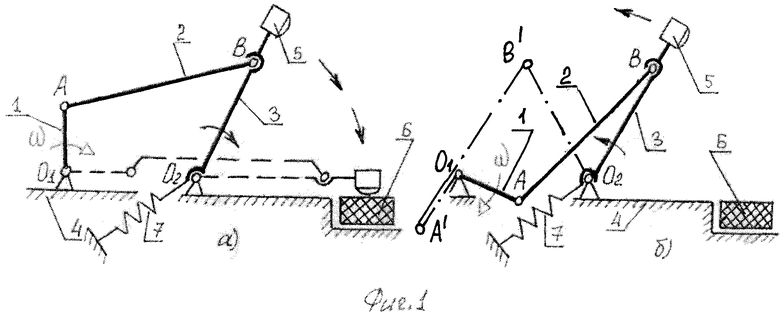
1. Шарнирный виброударный механизм, содержащий замкнутую кинематическую цепь с приводным двигателем, отличающийся тем, что замкнутая кинематическая цепь выполнена в виде основного кривошипно-коромыслового механизма с подвижно соединенными между собой через цилиндрические шарниры рычажными звеньями в виде ведущего кривошипа, шатуна, коромысла и стойки, в котором сумма длина ведущего кривошипа и шатуна равна сумме длин коромысла и стойки, коромысло и стойка выполнены одинаковой длины, а длина шатуна равна утроенной длине ведущего кривошипа для образования при сборке механизма компактного равностороннего треугольника.
2. Шарнирный виброударный механизм по п. 1, отличающийся тем, что коромысло выполнено с возможностью закрепления на нем рабочего органа, создающего ударное воздействие на выходе в крайнем положении кривошипно-коромыслового механизма при расположении на одной прямой линии всех его рычажных звеньев и установленного на стойке ограничителя углового внутрициклового поворота коромысла, а основной кривошипно-коромысловый механизм снабжен кинематически связанным с ним дополнительным кривошипно-коромысловым механизмом.
3. Шарнирный виброударный механизм по п. 1, отличающийся тем, что коромысло выполнено с возможностью его соединения со стойкой через упругий элемент, обеспечивающий заданное расположение относительно стойки всех звеньев кривошипно-коромыслового механизма в его нерабочем положении при отключенном приводном двигателе и выполненный, например, в виде упругого торсионного вала или в виде винтовой пружины кручения, или растяжения, или сжатия, выполненной цилиндрической или конической формы.
4. Шарнирный виброударный механизм по п. 1, отличающийся тем, что ведущий кривошип выполнен в виде одноплечего двухшарнирного рычага, у которого один конец шарнирно соединен со стойкой, другой конец шарнирно соединен с шатуном кривошипно-коромыслового механизма, а стойка выполнена в виде двухшарнирного звена.
5. Шарнирный виброударный механизм по п. 2, отличающийся тем, что стойка выполнена в виде трехшарнирного звена с расположением всех его трех шарниров на одной прямой линии, а ведущий кривошип выполнен в виде одноплечего рычага с расположенным на его конце двойным цилиндрическим шарниром для соединения между собой и с ведущим кривошипом основного и дополнительного кривошипно-коромысловых механизмов для образования двухпозиционной виброударной установки с установленными на коромыслах основного и дополнительного механизмов рабочими органами.
6. Шарнирный виброударный механизм по п. 2, отличающийся тем, что стойка выполнена в виде четырехшарнирного звена, а ведущий кривошип основного кривошипно-коромыслового механизма и ведущий кривошип дополнительного кривошипно-коромыслового механизма кинематически связаны между собой через приводное зацепление двух зубчатых колес с одинаковым числом зубьев, для образования установки чеканки тонкостенных изделий за счет встречного ударного взаимодействия двух рабочих органов через обрабатываемый листовой материал.
7. Шарнирный виброударный механизм по пп. 2 и 5, отличающийся тем, что ведущий кривошип выполнен в виде одноплечего трехшарнирного рычага треугольной формы, который через один из шарниров соединен со стойкой, а через два других шарнира соответственно соединен с шатуном основного кривошипно-коромыслового механизма и с шатуном дополнительного кривошипно-коромыслового механизма, для образования установки виброударного бучардирования камня с рабочими органами в виде бучард.
8. Шарнирный виброударный механизм по п. 1, отличающийся тем, что цилиндрические шарниры замкнутой кинематической цепи выполнены с параллельными между собой осями вращения соединяемых рычажных звеньев.
9. Шарнирный виброударный механизм по пп. 1 и 2, отличающийся тем, что цилиндрические шарниры замкнутой кинематической цепи выполнены с непараллельными между собой осями вращения, например с пересекающимися между собой в одной точке осями вращения соединяемых рычажных звеньев, для образования пространственного виброударного смесителя, в котором шатун выполнен с возможностью закрепления на нем месильной емкости, стойка снабжена упругим упором, который при угловом повороте коромысла взаимодействует с установленным на коромысле ударным бойком в крайнем положении шарнирного виброударного механизма, а все звенья шарнирного виброударного механизма для перемещения по сферической поверхности с радиусом R из упомянутой точки M выполнены со следующим суммарным соотношением углов между пересекающимися осями шарниров соответственно ведущего кривошипа (угол γ1), шатуна (угол γ2), коромысла (угол γ3) и стойки (угол γ4):
γ1+γ2=γ3+γ4.
10. Шарнирный виброударный механизм по п. 1, отличающийся тем, что замкнутая кинематическая цепь может быть выполнена со входной кинематической парой привода от вращательного двигателя, совмещенной с цилиндрическим шарниром, расположенным между ведущим кривошипом и стойкой, или совмещенной с цилиндрическим шарниром, расположенным между ведущим кривошипом и шатуном, а привод с вращательным двигателем выполнен с возможностью регулирования угловой скорости ω ведущего кривошипа.
| Способ и прибор для определения глубины залегания камней, пузырей и т.п. в кусках стекла | 1927 |
|
SU7687A1 |
| УСТРОЙСТВО для ДРОБЛЕНИЯ НЕГАБАРИТА | 0 |
|
SU267321A1 |
| УСТРОЙСТВО ДЛЯ ЗАБИВАНИЯ В ГРУНТ ДЛИННОМЕРНЫХ ЭЛЕМЕНТОВ, НАПРИМЕР ТРУБ | 1999 |
|
RU2163955C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2013 |
|
RU2548087C1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
| Пространственный рычажный механизм | 1983 |
|
SU1151732A1 |

