Гидравлические передачи имеют широкое распространение во многих областях машиностроения, как-то: станки, суда и моторные повозки. В последних получили распространение, главным образом, турбопередачи («Трилок», «Фонт», «Лисхольмсмит» и др.). Передачи этого типа обладают существенным недостатком - малым коэфициентом трансформации крутящего момента.
Свободными от этого недостатка являются передачи с аксиально перемещающимися в роторе лопатками.
Однако существенным недостатком известных уже гидравлических передач с аксиально перемещающимися лопастями является то, что вал ротора не разгружен от одностороннего аксиального давления.
Для устранения указанного недостатка настоящим изобретением предлагается произвести эту разгрузку путем применения второго рабочего комплекта лопастей, расположенных в рабочем пространстве противоположно первым.
Введением второго рабочего комплекта лопаток обеспечивается получение той же мощности при меньшей длине лопаток, что приводит к упрощению и облегчению всей передачи.
Ниже описывается одна из примерных форм выполнения предлагаемой передачи, применительно к трактору ЧТЗ.
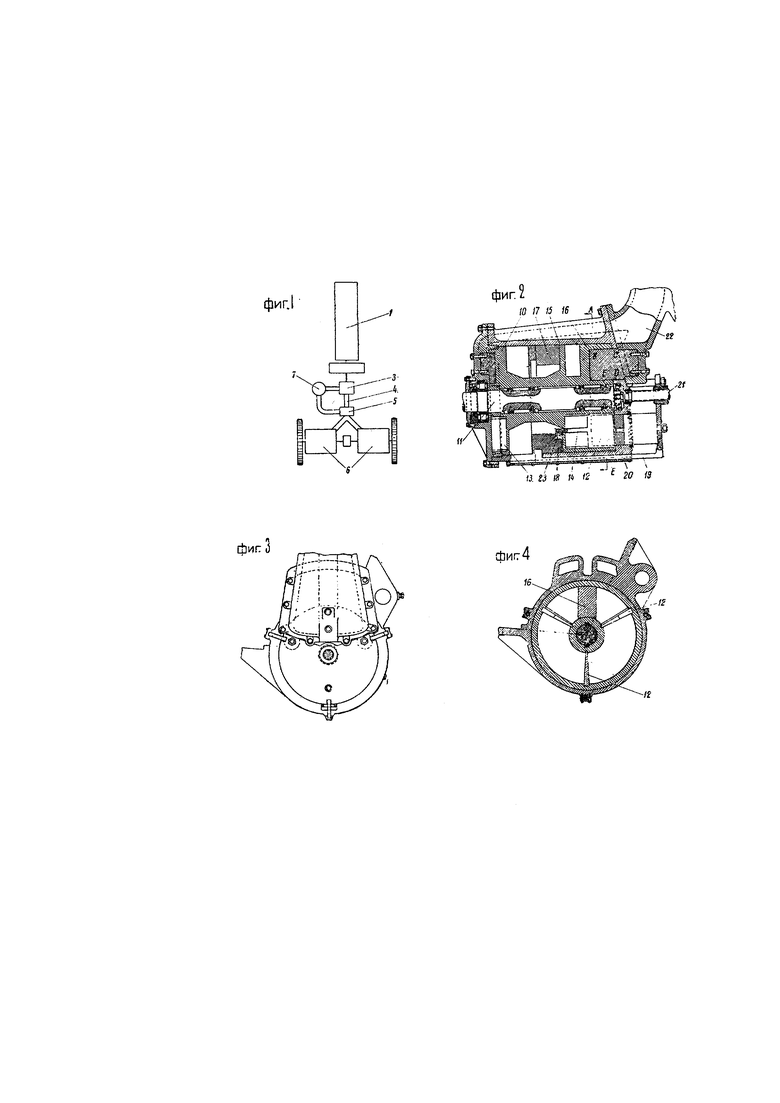
На прилагаемом чертеже фиг. 1 изображает схему гидравлической реверсивной передачи для трактора: фиг. 2 - продольный разрез гидравлического мотора для одной полуоси: фиг. 3 - вид того же мотора с торца: фиг. 4 - то же в разрезе по ABCDEF на фиг. 2.
Двигатель 1 приводит во вращение насос 3, который нагнетает рабочую жидкость в трубопровод 4. Пройдя распределительное устройство 5, струя рабочей жидкости разветвляется и подводится к правому и левому гидравлическим моторам 6. Обратно к насосу жидкость по трубопроводу низкого давления (не показанному на чертеже) проходит через распределительное устройство 5 в ресивер 7, из которого она уже поступает в насос.
Ротор 10 гидравлического мотора 6, выполненный в виде барабана, закреплен на ведомой полуоси 11 трактора. В теле ротора 10 выбраны три аксиальных паза для первого комплекта рабочих лопастей 12 и на противоположном конце барабана пазы для второго комплекта лопастей 13.
Рабочие лопасти 12 снабжены хвостовиками 14, которые свободными концами, несущими игольчатые подшипники 23, взаимодействуют с криволинейной направляющей. Лопатки 13 второго комплекта имеют два пальца, скользящие в профильной дорожке, выбранной в крышке корпуса мотора. Ротор помещен в корпусе 15, укрепленном с помощью кронштейна на раме трактора. Разделительная перегородка 16 отделяет зону высокого давления от зоны низкого.
Криволинейная направляющая для рабочих лопастей выполнена из двух частей: одной 17 неподвижной и второй 18 подвижной в форме полукольца. Подвижная часть 18 помощью планки 19 соединена с полукольцом 20, расположенным в крышке корпуса 15 со стороны первого комплекта лопастей 12. Перемещение части 18 направляющей и полукольца 20 осуществляется помощью винта 21.
Рабочая среда подводится по трубопроводу 22 и разделяется на два потока: один больший поступает на лопасти 12, а второй меньший - на лопасти 13.
Насос данной передачи может быть применен точно такой же конструкции, как и гидравлический мотор или же без дополнительного комплекта лопастей и постоянной производительности.
Действие предлагаемой передачи происходит следующим образом. При входе в мотор, струя рабочей жидкости, поступающей из трубопровода высокого давления, разветвляется на две части. Большая часть струи поступает к регулируемым лопастям, а меньшая часть подводится через специальный канал в теле статора к малым не регулируемым лопастям, расположенным в противоположной части ротора мотора. Давление, производимое рабочей жидкостью из лопасти, вызывает вращение ротора и создает тем самым на валу мотора ведущий момент.
Под давлением рабочей жидкости лопасть поворачивает на угол 126°. В этот момент рабочий канал перекрывается второй лопастью, первая же начинает перемещаться аксиально из рабочего канала в паз ротора и соединяет часть рабочего канала мотора с трубопроводом низкого давления. Отработанная жидкость под давлением второй последовательно идущей лопасти выбрасывается из рабочего канала мотора в трубопровод низкого давления и из, него в ресивер.
Регулирование ведущего (тягового) момента в моторе производится изменением величины аксиального вылета лопастей 12. В соответствии с последним определяется и величина рабочей площади лопастей 12, а с помощью полукольца 20 устанавливается ширина сечения рабочего канала.
Изменение вылета лопастей 12 при одновременном изменении ширины рабочего канала производится винтом 21. Поворот винта 21 вызывает аксиальное перемещение связанных с ним полукольца 20 и подвижной части 18 направляющей для лопастей 12.
Положение, изображенное на фиг. 2, соответствует наибольшему тяговому моменту. При перемещении лопастей 12 в крайнее левое (по чертежу) положение, они будут утоплены в теле ротора, полукольцо 20 перекроет рабочий канал и вся струя подаваемой насосом жидкости направится на лопасти 13. Это положение лопастей соответствует наименьшему тяговому моменту.
Разумеется, что наряду с крайними положениями регулирующего полукольца, определяющего наибольшее открытие рабочего канала и его закрытие, возможно установить целый ряд его промежуточных положений, каждому из которых соответствует свой ведущий момент. Это обстоятельство и обеспечивает непрерывную прогрессивность в трансформировании ведущего момента.
1. Гидравлическая реверсивная передача с применением ротационного насоса или гидравлического мотора с аксиально перемещающимися рабочими лопастями, отличающаяся тем, что насос или мотор, в целях разгрузки вала ротора от аксиального давления, снабжены вторым комплектом рабочих лопастей, расположенных противоположно первым.
2. Форма выполнения передачи по п. 1, отличающаяся тем, что лопасти второго комплекта имеют постоянный вылет.
3. Форма выполнения передачи по п. 1, отличающаяся тем, что рабочая площадь второго комплекта лопастей значительно (в несколько раз) меньше максимально возможной рабочей площади лопастей основного комплекта.
