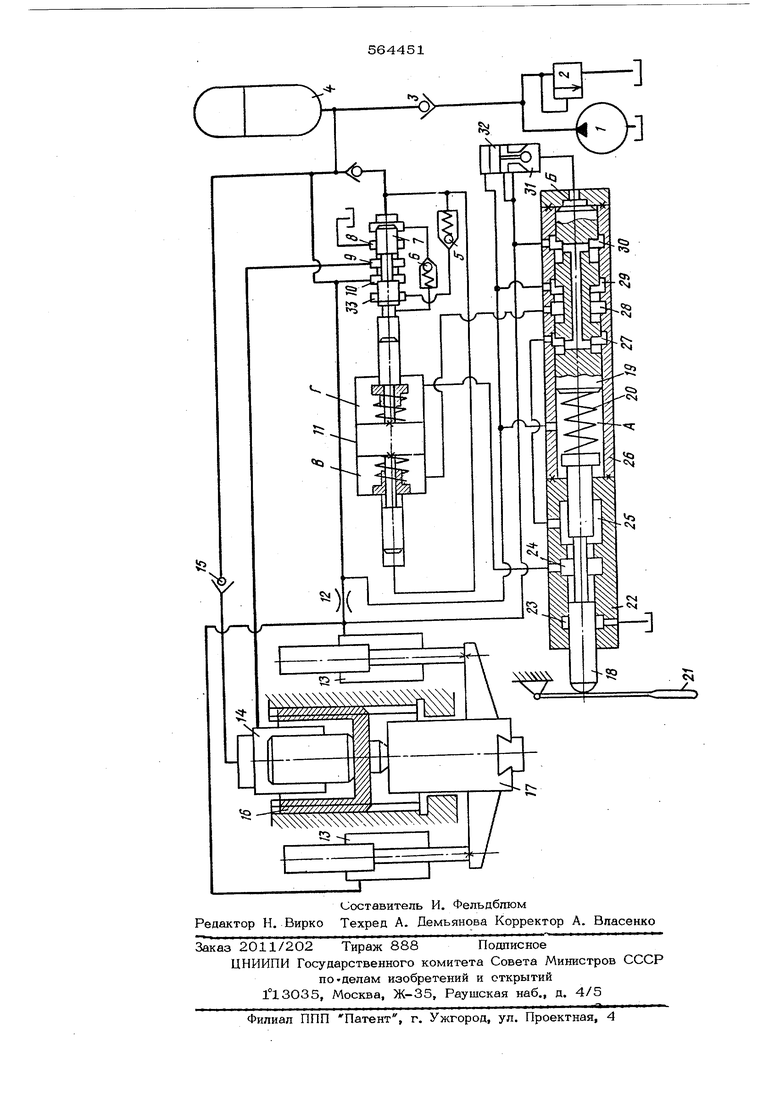
юшего золотника образована управляющая камера, соединенная гидролинией с выходом офатного клапана, вход которого соединен с участком напорноЁ гидролинии между дросселем и цилиндрами возвратного хода, причем сер вопривод обратного клапана соединен гидролиниямн с разделительной камерой и участком напорной гидролинии между аккумулятором и дросселем, На чертеже изображена схема предложенно системы управления. Она содержит насос 1 поо тоянной производительности с нормально закры тым предохранительным клапаном 2. Насос постоянно соединен через обратный кпа пан 3 с аккумулятором 4. Автомат реверса состоит из двух основных узлов: двухпозиционного трехходового золотникового распределителя, в корпусе которого смонтированы обратные клапаны 5, 6 и золотник 7 и выполнены три управляющие расточки 8-1О, и двухштокового цилиндра 11, смонтированно;ч) в одном узле с золотниковым распределителем. Расточка 10 соединена через дроссель 12 с полостями подъемных цилиндров 13 и с аккумулятором 4, расточка 9 - с полостью рабочего цилиндра 14, у которого в верхней части выполнена демпферная полость, соединенная через обратный клапан 15с аккумулятором 4. В станине гидровинтового пресс-молота смонтированы также винт 16 и ползун 17. Распределитель предварительного переключения выполнен в виде узла, состоящего из двух соосно смонтированных золотниковых переключателей, между зопот никами 18 и 19 которых установлена пружина 20. На золотник 18 действует ры чаг управления 21. Корпус 22 переключателя подъема выполйен с тремя расточками: наружной 23, средней 24 к внутренней 25. В начале движения золотника 18 в сторону пружины 20, расточка 23 перекрывается, а расточки 24 и 25 сообщаются через выточку на золотнике 18. Такое,состояние сохраняется во все время дальнейшего перемещения сжатия пружины 2О рычагом 21. Расточка 23 постоянно подключена к баку. Расточка 24 сообщена с той полостью (подъемной полостью) двух штокового цилиндра автомата реверса, соединение котооой с ййком приводит к перекпючениюзопотника 7 на подъем ползуна 17 Корпус 26 переключателя реверса выполнен с четырьмя расточками: внутренней 27 средней внутренней 28, средней наружной 29 и наружной «30. Зелотник 19 выполнен полым с тремя кольцевым выточками. Край ние от торцов выточки сообщаются между собой через сверления в золотнике. Межзолотниковая полость А распределителя предварительного переключения подключена к дросселю 12 со стороны аккумулятора 4, Торцовая полость Б переключателя ревер ра соединена через управляемый обратный клэ пан 31 с дросселем 12 со стороны подъемш.)х цилиндров 13. Сервоцилиндр 32 управляемого обратного клапана 31 подключен параллельно к полостям А и Б так, что штокрвая полость сообщается с полостью Б, а порщневая с пo Iocтью А. Полость плавающего реверса В двухштрков ю цилиндра автомата ре JBepca с расточкой 28. Работает автомат управления гидрови товым пресс ом следующим образом. В исходном положении насос 1 выключен.. Все магистрали заполнены рабочей жидкостью, аккумулятор 4 разряжен, золотник 7 занимает любое положение, поршень двухщтокового цилиндра 11 под действием пружин находится в среднем положении, рычаг управления 21 отпущен, золотники 18 и 19 под действием пружины 2О находятся в противоположных положениях. После вклк чения насоса 1 давление жидкости во всех магистралях повышается. Так как полость Г сообщена с баком, то поршень двухштокового цилиндра 11 перемещается вправо (по чертежу). Это приводит к перемещению золотника 7 также вправо. При этом ход до момента-открытия расточки 33 больше хода до момента перр|срытия расточки 1О и открытия расточки 8 (последнее происходит одновременно), следствием чего является надежность переключения золотник ка 7 и удержания его в этой позиции. Излишек жидкости перетекает через обратный клапан 5 в полость В двухштокового цилиндра 11. Переключение золотника 7 впрек во приводит к тому, что полость рабочего цилиндра 14 соединяется через расточки 8 ,и 8 с баком, а расточка Ю перекрывает ся. Следовательно, ползун 17 под действием подъемных цилиндров 13 поднимаетсв до упора и продолжает удерживаться на. весу до момента нажатия на рычаг управления 21. По окончании зарядки аккумулятр ра 4 можно включать пресс на автоматический ход в молотовом режиме или же на несколько пробных ходов настроить с помощью рычага 21 нужное усилие (энергшо) прессования. При перемещении рычагом 21 золотника 1G расточка 23 перекрывается пояском золотника, а расточки 24 и 25 соединяются. При этом полость Г сообщается в полостью В через расточки 24 и 25 переключателя подъема, расточку 27, сверления в золотнике 19 и расточку 30,
дроссель 12, расточки 29 и 28. Поршень двухштокового цилиндра 11 под действием правой пружины перемешается в среднее положение. Золотник 7 перекгаочается влево. При этом обратный клапан 6 срабатывает аналогично клапану 5.
Тепер расточки 9 н Ю соединены и жидкость от аккумулятора -5 н насоса а одновременно подается в полость рабочего цилиндра 14 и в полости подъемных цилиндров 13. Так как площадь плунжера рабочего цилиндра 14 больше суммарной площа.ди подъемных цилиндров 13, то ползун 17 движется вниз с ускорением (разряжается аккумулятор 4). Растет скорость потока через дроссель 12 и, соответственно, перепад на дросселе, направление которого оответствует направлению потокажидкости.. Двухштоковый цилиндр 11 автомата реверса расчитан на минимальный перепад при незначительнь1Х скоростях ползуна 17. Поэтому в момент начала хофа вниз поршень двухштокового цилинд{ а 11 под действием минимального перепада передвигает ся от среднего положения влево, сжав соответствуюшую пружину {жидкость из левой плунжерной полости перетекает в правую через офатный клапан 6). По достижении ползуном 17 определенной скорости (перепад достигает определенной величины), ко торая зависит от степени сжатия пружины 2О рычагом 21, золотник 19, преодолев усилие пружины 20, перемещается влево под действием перепада давления на дросселе 12, что обеспечивает перепад давлений в торцовых полостях А и Ь ( в полости Ъ давление больше, чем в полости А). Управляемый обратный клапан 31 запирает полость Ь, не давая возможности золотнику вернуться в исходное положение. Переключение золотника 19 приводит к соединению полостей Б и Т через расточки 27 и 28 нерек/почателя реверса. При этом поршень двухштокового цилиндра, 11 перемещается под действием левой пружины вправо, переключив золотник 7 в ту же сторону. Полость рабочего цилиндра 14 соединяется с баком через расточки 9 и 8. Это приводит к торможению ползуна 17 и передаче кинематической энергии в аккумулятор 4. Израсходовав энергию, ползун 17 останавливается и затем начинает двигаться вверх с ускорением, которое ему сообщает аккумулятор 4. Перепад давления на Щ)осселе меняет знак, и сервоцилиндр 32 открывает обратный клапан 31. Золотник 19 под действием пружины 20 и перепада давления возвращается .в npasoe по гожёние, вытесняя жидкость из полости Б в полость А . Попосги и Т соединяются ервз расточки 24, 25, 27, 30, 28 и 29 с дросселем, что приводит к перемещению поршня двухштокового цилиндра 11 вправо и перекачиванию жидкости чеоез обратный клепан 5.
В конце хода ползуна 17 вверх njiywxf.ep рабочего цилиндра 14 входи в демпферную камеру и нагнетает жидкость через о атнь1й клапан 15 в аккумулятор 4, осушест вляя этим торможение ползуна-17 и подзарядку аккумулятора 4.
В момент остановки ползуна 17 поток жидкости через дроссель 12 прекращается, перепад давления исчезает. Это приводит к перемещению поршня двухштокового цилиндра 11 под действием правой пружины влево и к переключению, как описано выше золотника. 7. Расточки 9 и Icr соедннякПСя и ползун разгоняется аккумулятором 4 вниз. Автоматические хода будут продолжатьсяг да тех пор, пока не дет отпущен рычаг 21. Степень зажатия пружины рычагом 21 определяет энергию (силу) воздействия пол: на на обрабатываемый объект. При максимально зажатой пружине 2 О вся кине-тическая энергия хода приложена к обраба тываемому объекту, так как максимальный перепад (при максй альной скорости ползуна 17 )е не сможет преодолеть усилие пружины 20, т. е. переключить золотник 10 и не будет происходить торможение аккумулятором 4. Н этом случае реверс на ход вверх происходит аналогично вышеописанному случаю реверса на ход вниз, т. е, автомат реверса будет переключаться без предварительного сигнала, а торможение ползуна 17 будет производить сила технологического сопротивления (сила прессования, ковки).
Формула изобретения
1. Система управления гидровинтовым пресс-молотом, содержащая насосво-аккумуляторную станцию, напорная гидролиния которой постоянно соединена с цили11Щ)ами возвратного хода ползуна через дроссель н с золотником для попеременного сообщен ния полости рабочего цилиндра с напорной н сливной гидролиниями, а также устройство для переключения золотника, выполненное в виде дополнительного гндроцилиндра с двухштоковым подпружиненным поршнем, .отличающаяся тем, что, с целью Обеспечения бесступенчатого регулирования величины энергии удара пресс-молота, она снабжена механизмом .обратной связи, выполненным в виде распределительной коробки с ручным управлением и обратного клапана с сервоприводам
соединенных гидропиниями с полостями дополнительного гидроципиндра, и с напорной тчщропинией цилиндров возвратного хода.
2. Система управления по п. 1, отличающаяся тем, что распределительная коробка выполнена в виде корпуса в котором соосно смонтированы выгрузочный и переключающий золотники с установленной между Их торцами пружиной, при этом пружина и взаимодействующие с ней торцы золотников помещены в разделительной камере, а между корпусом и вторым торцом переключающего золотника образована управляющая камера., соединенная гидролинией с выходом обратного клапана, вход
которого соединен с участком напорной гидролинии между дросселем и цилиндрами возвратного хода, причем сервопривод обратного клапана соединен гидролиниями с раздельной камерой и участком напорной гидролинии между аккумулятором и дросселем. Источники информации, принятые во внимание при экспертизе:
1.Ю. А. Бочаров и В. Н. Прокофьев. Гидропривод кузнечно-прессовых машин Изд. Высшая школа. М., 1969 , с. 233, рис.ХП. 7.
2,Авторское свидетельство СССР № 398766; М. Кл F-15 В 15/02i опубл. 27.09.73.


| название | год | авторы | номер документа |
|---|---|---|---|
| Привод гидровинтового пресса | 1980 |
|
SU935315A1 |
| Гидропривод молота | 1973 |
|
SU613848A1 |
| Гидровинтовой пресс-молот | 1978 |
|
SU724359A1 |
| Гидропанель управления реверсом привода ползуна и приводом подач | 1974 |
|
SU566976A1 |
| Гидропривод для возвратно-поступательного перемещения рабочего органа | 1982 |
|
SU1106926A1 |
| Гидропанель управления реверсом привода ползуна | 1977 |
|
SU744151A1 |
| Система управления гидравлическим прессом | 1982 |
|
SU1031770A1 |
| Устройство управления фрикционными муфтами гидромеханической трансмиссии транспортного средства | 1989 |
|
SU1678659A1 |
| Система управления гидравлическим прессом | 1981 |
|
SU1003469A1 |
| Гидропривод | 1990 |
|
SU1807252A1 |