мах ведения технологического лроцеоса (пуск, останов и т. п.), обусловленная необходимостью ручного воздействия человека-оператора «а задатчик номинала первого регулятора при переходе с релсима дистанционного управления на режим автоматической стабилизации или режим каскадного управления, и воздействия на задатчик дистанционного управления при переходе с режима каскадного управления или режима автоматической стабилизации на режим дистанционного управления.
Целью изобретения является повышение точности работы пневматического управляющего устройства.
Указанная цель достигается тем, что в устройстве дополнительно установлены элемент сравнения, сумматор, переменный дроссель, емкость, задатчик опорного давления, нормально открытый клапан и импульсаторы, причем каналы команд режимов каскадного управления и автоматической стабилизации подключены к управляющему .входу блока автоматической подготовки через последовательно установленные импульсаторы, а канал команды режима дистанционного управления соединен с управляющей камерой нормально открытого клапана, проточная камера которого соединена с выходом элемента сравнения, а сопло - с емкостью, положительной камерой сумматора и через переменный дроссель - с выходом задатчика опорного давления и отрицательной камерой сумматора, ко второй положительной камере которого подключен выход задатчика дистанционного управления, а выход соединен с отрицательной камерой элемента Сравнения и соплом нормально закрытого клапана, проточная камера которого подключена к положительной камере элемента сравнения.
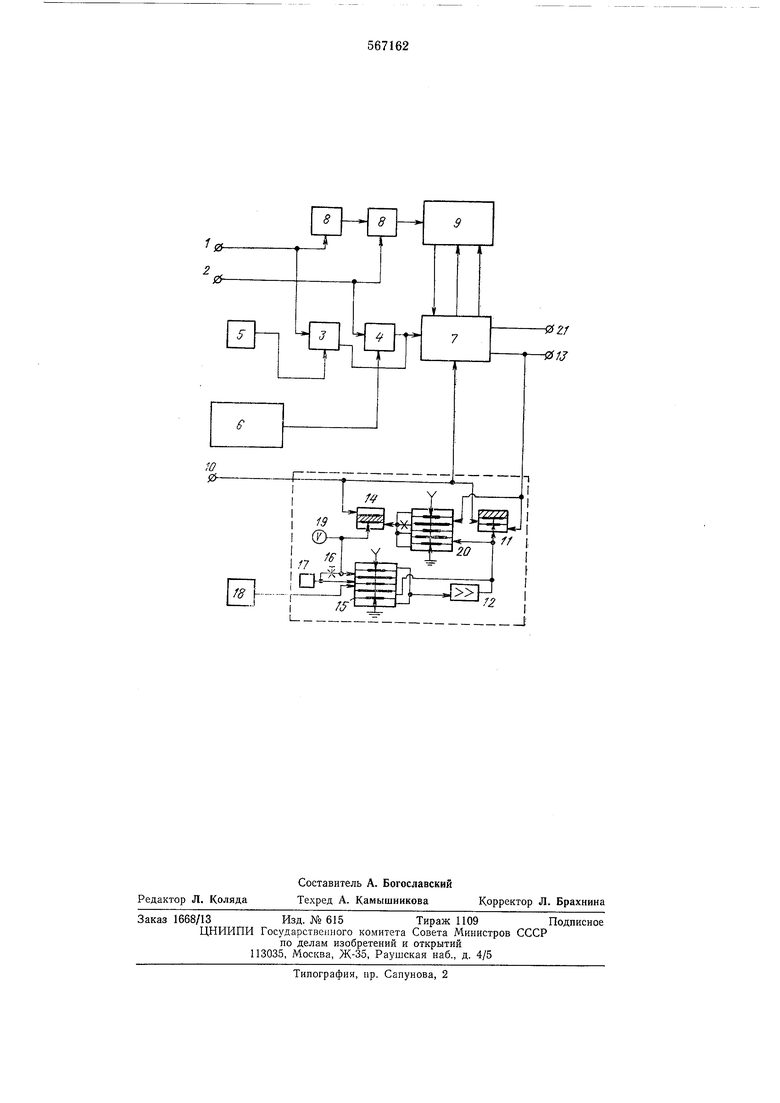
На чертеже представлена принципиальная схема предЛагаемого пневматического управляющего устройства.
Устройство содержит капал 1 команды режима автоматической стабилизации, канал 2 команды режима каскадного з правления; клапаны 3 и 4, задатчик номинала 5, регуляторы 6 и 7, и МП}лье а торы 8, блок 9 автоматической подготовки, капал 10 команды режима дистанционного управления, нормально закрытый клаиан 11, усилитель мощности 12, выходной канал 13 регулятора 7, нормально открытый клапан 14, сумматор 16, переменный дроссель 16, задатчик опорного давления 17, задатчик дистанционного управления 18, емкость 19, элемент сравнения 20, канал 21 регулируемой переменной регулятора 7. При этом каналы команд режимов автоматической стабилизации 1 и каскадного управления 2 подключены к управляющим камерам клапанов 3 и 4 соответственно, сопла которых соединены соответственно с выходом задатчика номинала 5 и выходом регулятора 6, а проточные камеры - с одним из входов регулятора 7. Каналы 1 и 2 подключены также через послеводательно соединенные импульсаторы 8 к командному входу блока 9 автоматической подготовки, связанного с регулятором 7. Канал 10 команды режима дистаиционного управления соединен с отключающим входом регулятора 7 и с управляющими камерами нормально закрытого клапана 11 и нормально открытого клапана 14 соответственно. Сопло нормально закрытого клапана
11 связано с выходом усилителя мощности 12 и с отрицательными камерами сумматора 15 и элемента сравнения 20. Проточная камера нормально закрытого клапана 11 подключена к выходному каналу 13 регулятора 7 и положительной камере элемента сравнения 20. Сопло проточной камеры нормально открытого клапана 14 подключено к положительной камере сумматора 15, емкости 19 и через переменный дроссель 16 к выходу задатчика
опорного давления 17 и к отрицательной камере сумматора 15, ко второй положительной камере которого подключен выход задатчика дистанционного управления 18, а к выходу - усилитель мощности 12. Проточная камера
нормально открытого клапана 14 соединена с выходом элемента сравнения 20. Устройство работает следующим образом. Для осуществления перехода с режима дистанционного управления на режим автоматической стабилизации или режим каскадного управления в канал соответствующего режима управления 1 или 2 подается командный сигнал в потенциальной форме, который далее одновременно поступает в управляющую
камеру соответствующего клапана 3 или 4, подключая выход задатчика номинала 5 или выход регулятора 6 к входу регулятора 7, и в соответствующие импульсаторы 8, преобразующие потенциальный командный сигнал -в
импульс, под действием которого блок 9 осуществляет подготовку (или балансировку) регулятора 7, обеспечивая тем самым безударное подключение его выходного канала 13 к исполнительному механизму (на схеме
не изображен), независимо от имеющейся в данный момент величины рассогласования между сигналами регулируемой переменной и выхода задатчика номинала 5 или выхода регзлятора 6.
Для осуществления обратного перехода с режима автоматической стабилизации или с режима каскадного управления на режим дистанционного управления в канал 10 подается командный сигнал, Который одновремеино отключает регулятор 7, открывает нормально закрытый клапан И, обеспечивая прохождения сигнала с выхода сумматора 15 в выходной канал 13 регулятора 7, и закрывает нормально открытый клапан 14, Вследствие чего, Происходит формирование на выходе сумматора 15 сигнала, равного по величине сигналу в выходном канале 13 регулятора 7. В положительной и отрицательной камерах сумматора 15 через дроссель 16 происходит уравнение давлений до величины опорHoro давления, создаваемого с помощью задатчика 17. При этом давление на выходе сумматора 15 и клапана 11 изменяется до величины, равной давлению на выходе задатчика дистанционного управления 18 со -скоростью, определяемой динамическими характеристиками объекта управления, что обешечиется соответствующей проводимостью дросселя 16. Изменение величины давления на выходе задатчика дистанционного управления 18, а следовательно, и на выходе клапана 11 и в линии исполнительного механизма может производиться независимо от окончания процесса .перехода на режим дистанционного управления. В качестве регулятора 6 в предлагаемого устройстве могут быть использованы и другие средства, например управляющая вычислительная машина, программный задатчик и т. д. В этом случае к входу клапана 4 вместо регулятора 6 подключается внешнее задающее устройство.
Использование предлагаемого пневматического управляющего устройства позволяет осуществлять безударное автоматическое переключение режима работы контура регулирования, а также исключает внесение возмущающих воздействий в технологический процесс, возникающих при ручной подготовке регулятора для переключения с одного режима на другой человеком-оператором, что позволит сократить потери сырья и повысить качество выпускаемой продукции.
Формула изобретения
Пневматическое управляющее устройство, содержащее первый регулятор, входы которого соединены соответственно с каналом регулируемой переменной и через клапаны - с выходом второго регулятора и с выходом задатчнка номинала, блок автоматической подготовки, соединенный с первым регулятором, задатчик дистанционного управления, нормально закрытый клапан, проточная камера
которого подключена к выходу первого регулятора, причем управляющие камеры клапанов соединены с соответствующими каналами команд режимов, отличающееся тем, что, с целью повышения точности устройства, в
нем дополнительно установлены элемент сравнения, сумматор, переменный дроссель, емкость, задатчик опорного давления, нормально открытый клапан и импульсаторы, причем каналы команд режимов каскадного
управления и автоматической стабилизации подключены к управляющему входу блока автоматической подготовки через последовательно установленные импульсаторы, а канал команды режима дистанционного управления
соединен с заправляющей камерой нормально открытого клапана, проточная камера которого соединена с выходом элемента сравнения, а сопло - с емкостью, положительной камерой сумматора и через переменный дроссель - с выходом задатчика опорного Давления н отрицательной камерой сумматора, ко .второй положительной камере которого подключен выход задатчика дистанционного управления, а выход соединен с отрицательной
камерой элемента сравнения и соплом нормально закрытого клапана, проточная камера которого подключена к положительной камере элемента сравнения.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР ЛЬ 446030, кл. G 05В 15/02, 1971.
2.Авторское свидетельство СССР Ai 424113, кл. G 05В 11/58, 1970.
f8 r
-02/ iZffJ
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ К/хСКАДНОГОУПРАВЛЕНИЯ | 1972 |
|
SU424113A1 |
| Пневматический регулятор | 1989 |
|
SU1619230A2 |
| Пневматический регулятор | 1982 |
|
SU1040466A1 |
| ПНЕВМАТИЧЕСКИЙ ДИСКРЕТНЫЙ РЕГУЛЯТО ОПТИМАЛЬНОГО РЕЖИМА | 1971 |
|
SU432457A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| Система автоматического управления работой дозатора | 1990 |
|
SU1747309A1 |
| ГЕНЕРАТОР ИМПУЛЬСОВ | 1992 |
|
RU2032840C1 |
| Пневматическое устройство для каскадного регулирования | 1977 |
|
SU739471A1 |
| Пневматическое устройство для ускорения передачи дискретных сигналов | 1983 |
|
SU1126994A1 |
| Пневматическое устройство централизованного каскадного управления | 1977 |
|
SU705419A1 |