3
мируют его с сигналом от пропорциональноинтегрального регулятора и с учетом полученного сигнала изменяют мощность регулирующих станций. Такое рещение приводит к дополнительным экономическим выгодам как за счет повышения устойчивости работы объединяемых систем, так и за счет уменьшения интенсивности работы регулирующих станций в неопасных ситуациях.
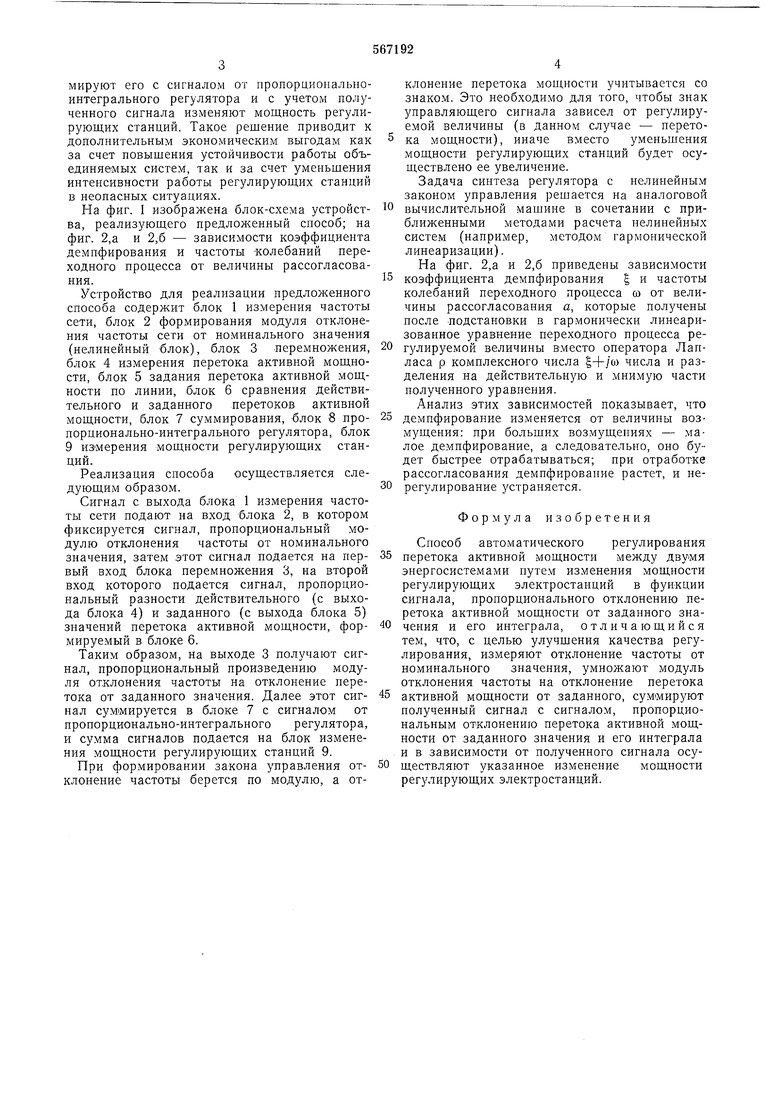
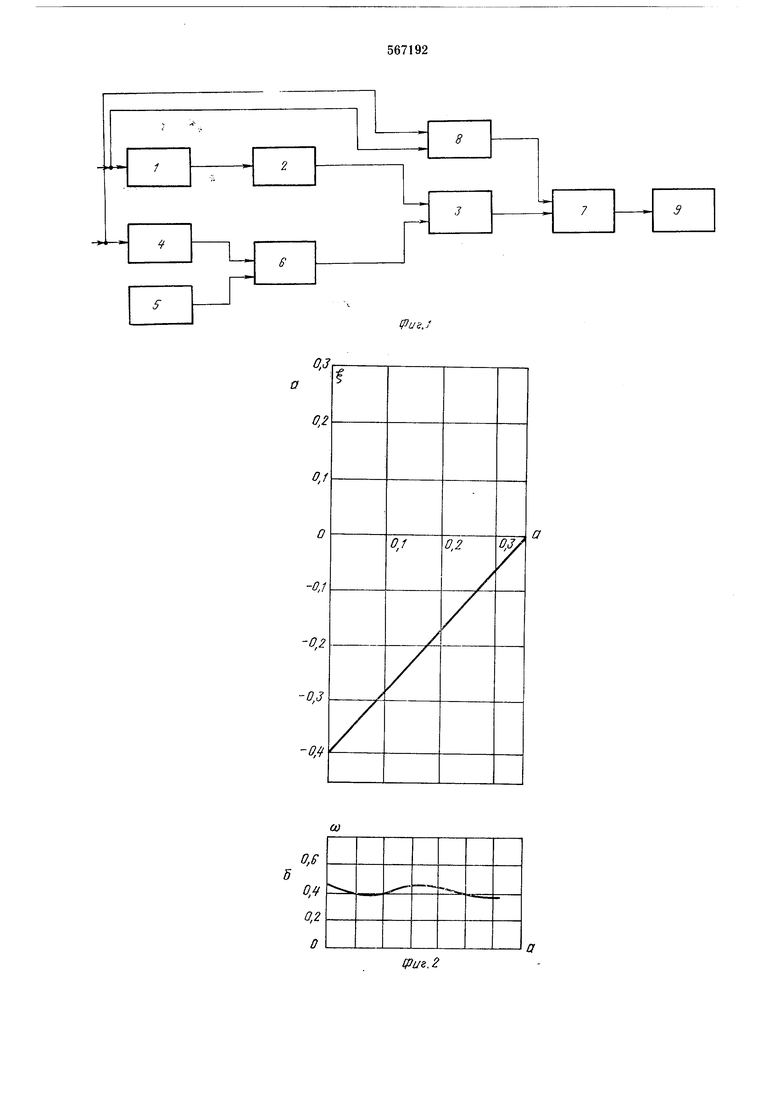
На фиг. 1 изображена блок-схема устройства, реализующего предложенный способ; на фиг. 2,а и 2,6 - зависимости коэффициента демпфирования и частоты колебаний переходного процесса от величины рассогласования.
Устройство для реализации предложенного способа содержит блок 1 измерения частоты сети, блок 2 формирования модуля отклонения частоты сети от номинального значения (нелинейный блок), блок 3 .перемножения, блок 4 измерения перетока активной мощности, блок 5 задания перетока активной мощности по линии, блок 6 сравнения действительного и заданного перетоков активной мощности, блок 7 суммирования, блок 8 пропорционально-интегрального регулятора, блок 9 измерения мощности регулирующих станций.
Реализация способа осуществляется следующим образом.
Сигнал с выхода блока 1 измерения частоты сети подают на вход блока 2, в котором фиксируется сигнал, пропорциональный модулю отклонения частоты от номинального значения, затем этот сигнал подается на первый вход блока перемножения 3, на второй вход которого подается сигнал, пропорциональный разности действительного (с выхода блока 4) и заданного (с выхода блока 5) значений перетока активной мощности, формируемый в блоке 6.
Таким образом, на выходе 3 получают сигнал, пропорциональный произведению модуля отклонения частоты на отклонение перетока от заданного значения. Далее этот сигнал суммируется в блоке 7 с сигналом от пропорционально-интегрального регулятора, и сумма сигналов подается на блок изменения мощности регулирующих станций 9.
При формировании закона управления отклонение частоты берется по модулю, а отклонение перетока мощности учитывается со знаком. Это необходимо для того, чтобы знак управляющего сигнала зависел от регулируемой величины (в данном случае - перетока мощности), иначе вместо уменьшения мощности регулирующих станций будет осуществлено ее увеличение.
Задача синтеза регулятора с нелинейным законом управления решается на аналоговой вычислительной машине в сочетании с приближенными методами расчета нелинейных систем (например, методом гармонической линеаризации). На фиг. 2,а и 2,6 приведены зависимости
коэффициента демпфирования | и частоты колебаний переходного процесса со от величины рассогласования а, которые получены после подстановки в гармонически линеаризованное уравнение переходного процесса регулируемой величины вместо оператора Лапласа р комплексного числа g-f-/w числа и разделения на действительную и мнимую части полученного уравнения. Анализ этих зависимостей показывает, что
демпфирование изменяется от величины возмущения: при больших возмущениях - малое демпфирование, а следовательно, оно будет быстрее отрабатываться; при отработке рассогласования демпфирование растет, и нерегулирование устраняется.
Формула изобретения
Способ автоматического регулирования
перетока активной мощности между двумя энергосистемами путем изменения мощности регулирующих электростанций в функции сигнала, пропорционального отклонению перетока активной мощности от заданного значения и его интеграла, отличающийся тем, что, с целью улучшения качества регулирования, измеряют отклонение частоты от номинального значения, умножают модуль отклонения частоты на отклонение перетока
активной мощности от заданного, суммируют полученный сигнал с сигналом, пропорциональным отклонению перетока активной мощности от заданного значения и его интеграла и в зависимости от полученного сигнала осуществляют указанное изменение мощности регулирующих электростанций.
O.Jr
о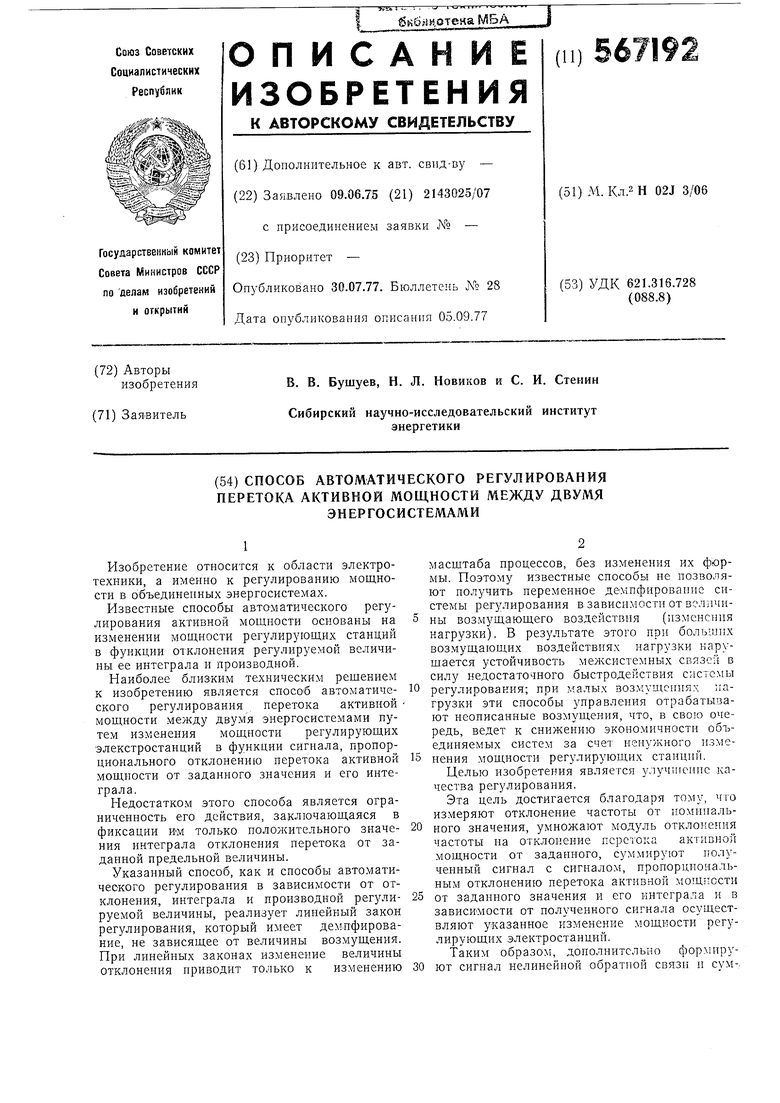
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический регулятор перетока активной мощности между двумя энергосистемами | 1978 |
|
SU767895A1 |
| Автоматический регулятор перетока активной мощности между двумя энергосистемами | 1983 |
|
SU1101964A1 |
| Способ автоматического регулирования частоты и обменной мощности в энергосистемах | 1975 |
|
SU560291A1 |
| Автоматический регулятор частоты и обменной мощности в энергосистемах | 1977 |
|
SU748650A1 |
| СПОСОБ РАБОТЫ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОГО РЕГУЛЯТОРА | 2014 |
|
RU2573731C2 |
| Способ регулирования перетоков мощности в объединенной энергосистеме | 1985 |
|
SU1277297A1 |
| Устройство для аварийного управления активной мощностью электростанции | 1990 |
|
SU1718329A2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МОЩНОСТЬЮ ГИДРОАГРЕГАТА ГЭС | 2024 |
|
RU2830453C1 |
| Способ автоматической коррекции характеристик регулятора частоты электроэнергетического агрегата | 1981 |
|
SU1035769A1 |
| Устройство для управления асинхронизированным электромеханическим преобразователем частоты (его варианты) | 1984 |
|
SU1246239A1 |
0
a
Ш/
0f
0,2
