рез AC ЭМ1ТЧ не превышает заданной величины. При увеличении перетока мощности выше заданной величины в закон управления второй машины АС ЭМПЧ вводится сигнал пропорциональ- ньш разности величин заданной мощности и перетока мощности через АС ЭМПЧ,что обеспечивает быстрое изменение перетока активной мощности, 3 случае когда напряжения возбуждения машин при изме;1ении перетока мощности чеИзобретение относится к электроехнике, в частности к передаче элекрической энергии по линиям переменного тока а более конкретно к асин- кронизированным электромеханическим преобразователям частоты (АС ЭМПЧ) для гибкой связи энергосистем с различающимися частотами.
Цель изобретения - повышение быстродействия при изменении перетока мощности через АС Э ЬШЧ и тем самым повышение надежности энергоснабжения электроприемников, подключенных к линии электропередачи с АС ЭМПЧ.
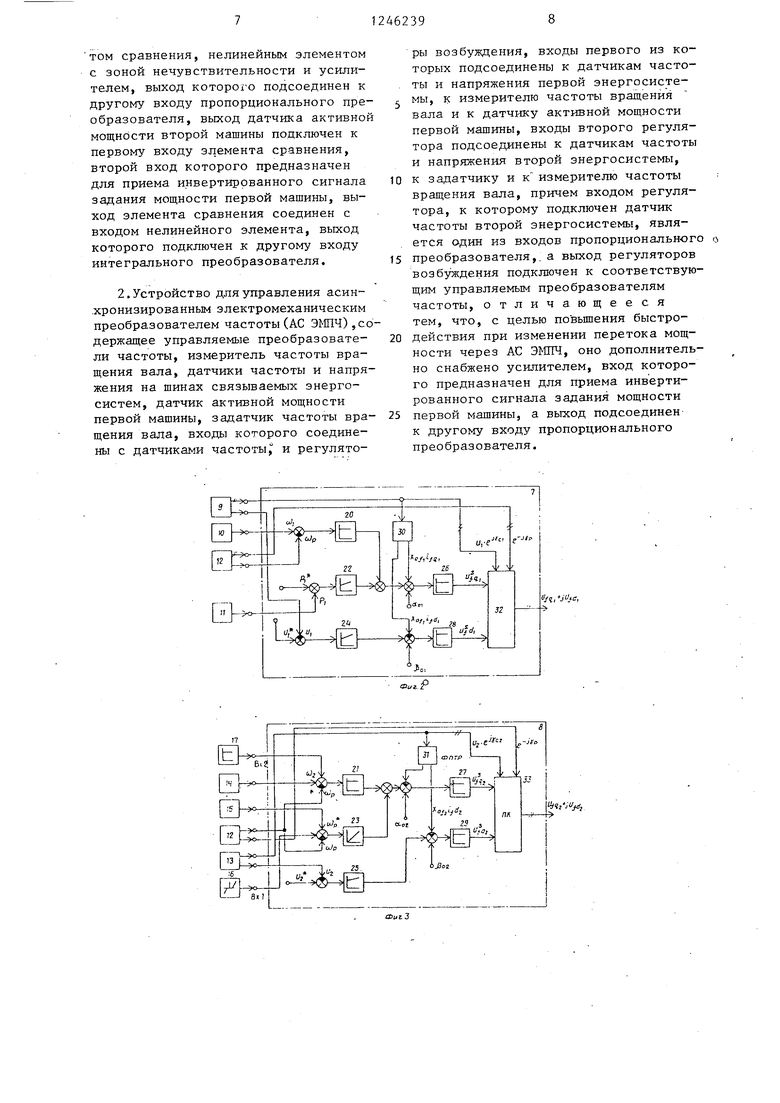
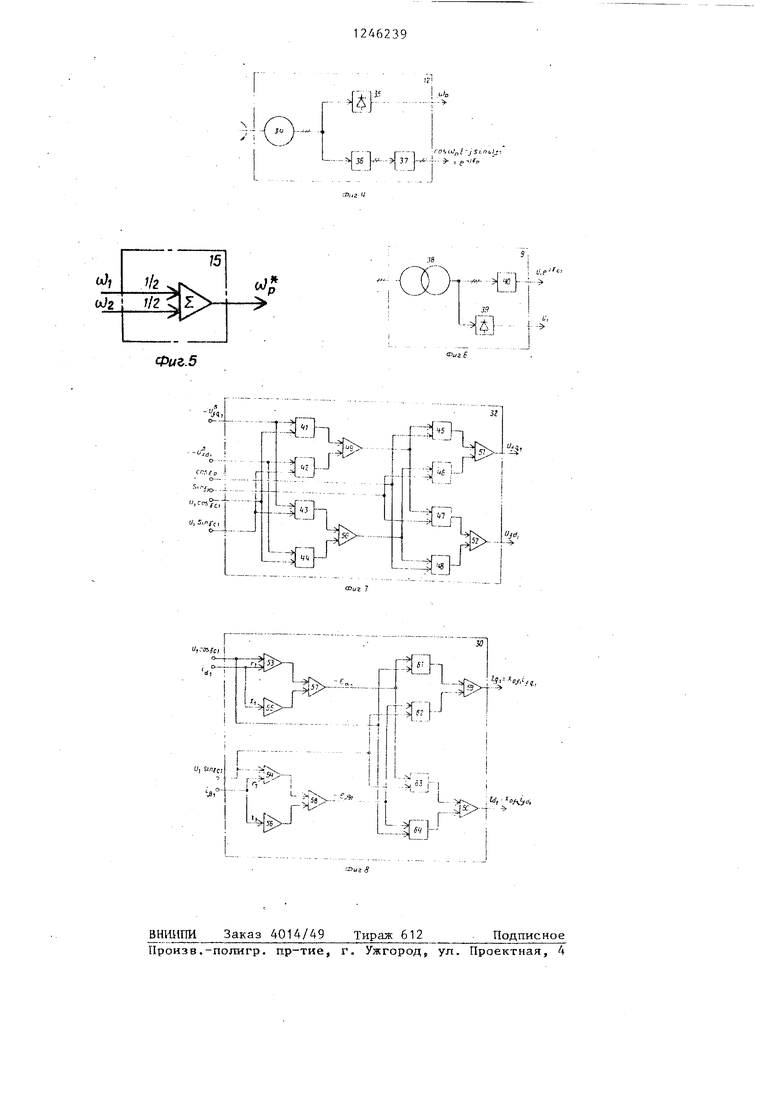
Иа фиг,1 представлена схема первого варианта предлагаемого устройства, на фиг. 2 и 3 - стрз ктуры регуляторов возбуждения; на фиг. 4-8 - соответственно структурные схемы измерителя частоты вращения валзд задатчика частоты вращения, датчика напряженш ; преобразователя координат и формирователя проекдий тока ротора.
Устройство для управления АС
ЭМПЧ, связывающего энергосистемь; 1 и 2 исостоящего из двух А.СМ 3 и 4 с жестко соединенными валами, включает в себя управляемые преобразователи 5 и 6 частоты, входы которых соединены с выходами регуляторов 7 и 8 возбуждения. На вход регулятора 7 поступает информация от датчиков 9 и 10 напряжения и частоты первой энергосистемы, датчика 11 активной мощности первой машины 3, измерителя 12 частоты вращения вала. Входы регулятора 8 соединены с датчиками 13
рез Ас ЭМПЧ, достигают потолочных значенго, в з стройство вводится усилитель 17, вход которого предназначен для приема задания на переток активной мощности а выход соединен с дополнительным входом регулятора 8 возбуледения. При изменении перетока мощности форсировка напряжения возбу вдения второй машины происходит теперь благодаря выходному сигналу усшштеля 17. 2 с,п. ф-лы. 8 ил.
и 14 и:апряжения и частоты второй энергосистемы, измерителем 12 частоты вращения вала, выходом задатчика 15 частоты вращения вала, Кроме того, входы регул51тора В возбуждения соединены с выходами нелинейного элемента 16 и усилителя 17. Вход нелинейного элемента 16 соединен с выходом элемента 18 сравнео ния, один из входов которого подключен к выходу датчика 19 активной мощности второй- машиныр а на другой его вход подается сигнал задания
На входы задатчика 15 подаются 5 сигналы от датчиков 10 и 14 частоты для формирования на выходе задатчика
(J + Uj сигнала Wp . - .
Каждый из регуляторов 7 и 8 имеет Q два параллельных канала, один из которых предназначен для поддержания заданного значения напряжения Ц и
и.
Другой канал предназначен: в пер- 5 вой машине для поддержания мощности Р р во второй машине для поддержания частоты вращения вала АС ЭМПЧ.
1 этом канале регулятора формируется сумма выходных сигналов соот0 ветственно блоков 20 и 21 регулирования скольжения, представляющих собой усилители, и блоков регулирования активной мощности: блока 22 - для первой машины; усилителя 17 и
блока 23 регулирования частоты вращения вала .- для второй машины; На входы блоков 20 и 21 подаются через сравнения сигналы от датчиков 10 и 1А частоты и измерителя 12 частоты вращения вала. На вход блока 22, представляющего собой пропорционально-интегральный преобразователь, подаются через элемент сравнения сигнал задания Г и сигнал от датчика 11 активной мощности.
В канале регулирования напряжения на Еходы блоков 2А и 25, представляющих собой пропорционально-интеграль ные преобразователи, подаются через элементы сравнения сигналы от датчиков 9 и 13 напряжения и сигналы напряжения задания U и U. На вход блока 23, представляющего собой ин- тегральньй преобразователь, через элемент сравнения подаются сигналы . от задатчика 15 и измерителя 12 частоты вращения вала, а также от нелинейного элемента 16, Выходы блоков 20-25 и усилителя 17 через элементы сравнения подсоединены к входам блоков 26-29 регулирования проекций тока ротора, представляющих собой усилители, а именно: выходы блоков 20 и 22 - к входу блока 26, выход блока 24 - к входу блока 28, выходы блоков 17, 23 и 21 - к входу блока 27, выход блока 25 - к входу блока 29. Кроме того, на указанные входы через элементы сравнения подаются сигналы от формирователей 30 и 31 проекции тока ротора и сигналы начального задания проекций напряжения ротора oig
0. . и 01
Выходы блоков 26 и 28, 27 и 29 подсоединены к входам соответствующих преобразователей 32 и 33 координат. На другие входы преобразователей 32 иЗЗ координат поступают двухфазные сигналы соответственно от датчиков 9 и 13 напряжения и от измерителя 12 скорости, вращения вала.
Стрзгктура измерителя 12 частоты вращения вала показана на фиг,4. f Синхронный тахогенератор 34, соединенный с валом АС ЭМПЧ, подключен своей статорной цепью к входу диодного выпрямителя 35 и к входу преобра- зователя 36 трехфазного сигнала в двухфазный, выполненного, например, на трансформаторах.
Выход преобразователя 36 соединен с входом блока 37 интеграторов, выходом которого является двухфазный сигнал, поступающий на входы преобразователей 25 и 32 координат ({. ).
10 20
5
0
Задатчик 15 частоты вращения вала (фиг.5) представляет собой суммирующий усилитель, на входы которогопо- . даются сигналы, пропорциональные 5 частотам энергосистем (.) коэффициентом 1/2, Датчик 9 напряжения (фиг,6) представляет собой трехфазный измерительный трансформатор 38 напряжения, соедиеннный своим выходом с входом диодного выпрямителя 39 и преобразователя 40 трехфазного сигнала в двухфазньш, выход которого соединен с входами преобразователя 32 координат и формирова- t5 теля 30 проекций тока ротора.
Преобразователь 32 координат (фиг.7) состоит из блоков 41-48 перемножения и суммирующих усилителей 49-52,
Формирователь 30 проекций тока ротора (фиг,8) включает интеграторы 53 и 54, инверторы 55 и 56, суммирующие усилители 57-60 и блоки 61-64 перемножения. На выходе каждого регулятора 7 и 8 возбуждения формируется сигнал с частотой скольжения ротора, подаваемый на вход схемы управления тиристорами управляемого преобразователя частоты. Соответствующим управлением амплитудой и фазой изменяющегося по гармоническому закону напряжения возбуждения и компенсацией электромагнитной инерционности цепи ротора осуществляется связь энергосистем с различающимися параметрами режима, При этом частота напряжения возбуждения каждой из АСМ поддерживается равной разности частоты статора машины и частоты вращения вала, Функ-. . ция регулирования для машин может быть представлена в виде:
25
30
S..
ifl J
(,(p pJfкД()c(ь -4bK/S(L/;. (1)
- j
Uy, ,.Kju,.c.,).,.J(.p)dit. t о
p;-Pzb4 Si -P.MbJ,K,(u;-u,).
t 0
s(;-,),
где .
В нормальном режиме, когда разность ( ) не превышает некоторой заданной величины йР}од выходной
сигнал нелинейного элемента 16 ра вен-нулю, в результате чего вторая АСМ регулируется по напряжению и ча тоте вращения вала.
При изменении перетока мощности (изменений значений Р и Р,) через Ас ЭЬШЧ, когда ,, л сигнал на выходе нелинейного элемента пропорционален входному, т.е. равен
Кнэ Р. Рад) К,з ( ) . Тепер вторая АСМ управляется еще и по активной мощности,(1), При достижении Р значения на выходе 16 сигнал снова равен нулю и закон управления формируется в соответствии с (2) ,
{ К.( i ()dt
t Л ч
t
-jba7 b ur i - S
г i| (U|-U.j)
Предлагаемое устройство обеспечивает быстрое изменение перетока активной мощности через АС ЭМПЧ. Это следует из рассмотрения формул (1) и (2), откуда видно, что ггри изменении величин Р и Р происходят фор- сировки напряжений U и U,, при этом электромагнитные моменты обеих машин быстро достигают заданных значений, Мд.и М,„получаются разного знака
/ J i jt. u.
(поскольку ), и потому частота вращения вала АС изменяется Незначительно. Длительность переходного процесса, таким o6pa3ok, определяется электромагнитной постоянной времени (а не электромеханической) обмоток возбуждения и потолочным значением напряжения возбуждения АСМ,
При достаточном значении этого напряжения длительность переходного процесса составляет десятые доли секунды, т.е, сокращается на. порядок в сравнении с известным устройством для управления АС ЭМПЧ,
В случае5 когда предварительные расчеты показывают, что напряжения возбл. ждения машин при изменении перетока мощности через АС ЭМГИ достига- ют потолочных значений, то более при может стать второй, более простой вариант предлагаемого устройства. От известного устройства предлагаемый вариант будет Отличаться присутствием в схеме усилителя 17, вход которого предназначен для прием задания на переток активной мощности
0
0
О 5
Р 3 а выход соединен с дополнительным входом регулятора 8 возбуждения. В схеме регулятора 8 возбуждения
J (фиг,3) в этом случае отсутствует элемент 16 и дополнительный вход Вх,1, Схемы всех остальных узлов уст)эойства, приведенные на фиг, 2, 4-8, остаются без изменений,
o При изменении перетока мощности (изменении сигнала Р ) фррсировка напряжения возбуждения второй машины происходит теперь благодаря выходному сигналу усилителя 17. Этот
5 сигнал в данном случае выполняет еще и роль мгновенного корректора сит на- ла culg ( в первом варианте роль корректора, но не мгновенного, выполнял интегратор 23 благодаря выходному сигналу нелинейного элемента 16)
Фор)чула изоб.ретения
1. Устройство для управления асин- хронизированным электромеханическим преобразователем частоты (АС ЭМПЧ), содержащее заправляемые преобразователи частоты, измеритель частоты вращения вала, датчики частоты и напряжения на шинах связьшаемых энергосистем, датчик активной мощности первой машинЫд задатчик частоты вращения вала, входы которого соединены с датчиками частотыj и регуляторы возбуждения, входы первого из которых подсоединены с датчикам частоты и напряжения первой энергосистемы к измерителю частоты вращения- вала, и к датчику активной мощности первой машины, входы второго регулятора, подсоединены к датчикам частоты и напряжения второй энергосистемы, к зз.датчику и к измерителю 1астоты вращения вала, пр ичем входом регулятора, к которому подключен датчик частоты второй энергосистемы, является один из входов пропорционального преобразователя, входом регуля- Topaf к которому подключен задатчик, является один из входов интегрального преобразователя, а выход регуляторов возб окдения подключен к со- ответствующи управляем1з1м преобразователям частоты, отличающееся тем, что, с целью повышения быстродействия при изменении перето- йа мощности через АС ЭМПЧр оно дополнительно снабжено датчиком активной мощности второй машины, элемен том сравнения, нелинейным элементом с зоной нечувствительности и усилителем, выход KOTOpOi O подсоединен к другому входу пропорционального преобразователя, выход датчика активной мощности второй машины подключен к первому входу элемента сравнения, второй вход которого предназначен для приема инвертированного сигнала задания мощности первой машины, выход элемента сравнения соединен с входом нелинейного элемента, выход которого подключен к другому входу интегрального преобразователя.
2.Устройство для управления асин- .хронизированным электромеханическим преобразователем частоты (АС ЭШЧ), содержащее управляемые преобразователи частоты, измеритель частоты вращения вала, датчики частоты и напряжения на шинах связываемых энергосистем, датчик активной мощности первой машины, задатчик частоты вращения вала, входы которого соединены с датчиками частоты, и регуляторы возбуждения, входы первого из которых подсоединены к датчикам частоты и напряжения первой энергосисте- г мы, к измерителю частоты вращения вала и к датчику активной мощности первой машины, входы второго регулятора подсоединены к датчикам частоты и напряжения второй энергосистемы,
0 к задатчику и к измерителю частоты вращения вала, причем входом регулятора, к которому подключен датчик частоты второй энергосистемы, является один из входов пропорционального
5 преобразователя,, а выход регуляторов возбуждения подключен к соатветствую- щим управляемым преобразователям частоты, отличающееся тем, что, с целью повьщ1ения быстро0 действия при изменении перетока мощности через АС , оно дополнительно снабжено усилителем, вход которого предназначен для приема инвертированного сигнала задания мощности
5 первой машины, а выход подсоединен- к другому входу пропорционального преобразователя.
1n,,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1510047A2 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1984 |
|
SU1354334A1 |
| Способ управления устройством для связи двух энергосистем | 1986 |
|
SU1411882A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1576976A1 |
| Устройство для связи двух энергосистем | 1979 |
|
SU838886A1 |
| Устройство для связи двух энергосистем | 1987 |
|
SU1529351A2 |
| Устройство для связи двух энергосистем | 1978 |
|
SU771796A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1598041A1 |
| Устройство для связи двух энергосистем | 1985 |
|
SU1293788A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты для связи двух энергосистем | 1986 |
|
SU1411881A1 |
Изобретение относится к электротехнике, в частности к асинхрони- зированным электромеханическим преобразователям частоты (АС ) для гибкой связи энергосистем с различающимися частотами. Цель изобретения - повьшение быстродействия при изменении перетока мощности через АС ЭМПЧ и тем самым повьшение надежности энергоснабжения электроприемников, подключенных к линии электропередачи с АС . В нормальном ре жиме величина перетока мощности че - (П (Л ю 4ib О5 to 00 CD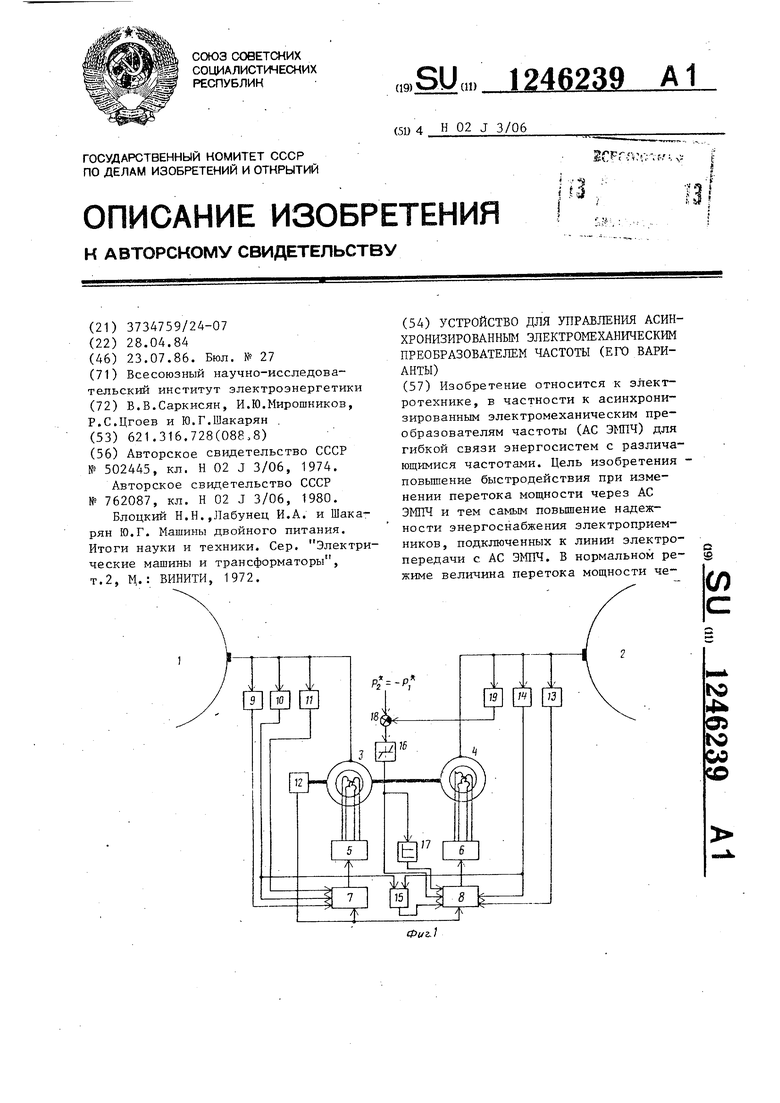
,
| Устройство для обьединения энергосистем | 1974 |
|
SU502445A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 762087, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Блоцкий Н.Н.,Лабунец И.А | |||
| и Шака- рян Ю.Г | |||
| Машины двойного питания | |||
| Итоги науки и техники | |||
| Сер | |||
| Электрические машины и трансформаторы, т.2, М.: ВИНИТИ, 1972. | |||
