при этом преобразователь выполнен в виде теызорезисторов, наклеенных на пружину. Полярный угол ф выбран в пределах от 10 до 290°. Форма пружины, соответствующая призеденному выше соотношению, получена экспериментальным путем, при такой форме пружины маятнику передается усилие, создаюш,ее «отрицательную упругость. Это усилие направлено по оси маятника к его центру. Кроме того, эта же пружина является измерительным элементом, так как на нее наклеены тензорезисторы. На фиг. 1 показана конструкция прибора; на фиг. 2 положение ленточной пружины до ее закрепления. Виброграф содержит рычаг 1 с инерционной массой 2, подвешенный к основанию 3 при помош,и двух пар взаимно перпендикулярных пружин 4. В положении равновесия маятник удерживается напряженной ленточной пружиной 5, имеюш,ей форму неполного витка гиперболической спирали в соответствии с соотношением, приведенным выше. Для регистрации колебаний на пружине 5 наклеены проволочные тензорезисторы 6. Кроме того, имеется электромагнитный успокоитель 7. Виброграф работает следуюш,им образом. При колебаниях объекта с установленным на нем вибрографом инерционная масса последнего остается неподвижной вследствие того, что собственная частота вибрографа в несколько раз меньше частоты колебаний объекта. Преобразование механических колебаний маятника в электрические осуществляется проволочными тензорезисторами, наклеенными на плоскую пружину. Применение в качестве упругого подвеса ленточной пружины приводит к упрощению конструкции вибрографа, так как эта пружина с наклеенными на нее тензорезисторами сама является измерительным элементом и выполняет функцию пружины, создающей «отрицательную упругость в горизонтальном маятнике. Предложенная конструкция вибрографа позволяет расширить диапазон исследуемых колебаний, т. е. получить устойчивые собственные колебания с частотой, составляющей доли герца и амплитудой до 26 мм и более. Кроме того, предлагаемый виброграф позволяет регистрировать сами виброперемещения в то время, как известные приборы, оснащенные индукционными датчиками, требуют дополнительного преобразования (интегрирования) сигнала, поступающего от вибрографа, что приводит к увеличению погрешности измерения, особенно в области инфранизких частот (0,5-10 Гц). Формула изобретения 1. Виброграф, содержащий преобразователь, маятник и пружину, удерживающую маятник в положении равновесия, один конец которой закреплен на корпусе, а другой на рычаге, отличающийся тем, что, с целью упрощения конструкции, пружина выполнена напряженной ленточкой, причем форма пружины выбрана в соответствии с соотношениемгде г - радиус-вектор; а - расстояние между полярной осью и асимптотой гиперболической спираФ - полярный угол, при этом преобразователь выполнен в виде тензорезисторов, наклеенных на пружину. 2. Виброграф по п. 1, отличающийся тем, что полярный угол ф выбран в пределах от 10 до 290°.
г/г /
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик вибрации | 1980 |
|
SU940072A1 |
| Устройство для измерения параметров ультразвуковых колебаний | 1980 |
|
SU974139A1 |
| РОТАЦИОННЫЙ ВИСКОЗИМЕТР | 2010 |
|
RU2424500C1 |
| Тензорезисторный преобразователь перемещений | 1986 |
|
SU1474450A1 |
| МНОГОБАЛОЧНЫЙ АКСЕЛЕРОМЕТР - АНАЛИЗАТОР СПЕКТРА МЕХАНИЧЕСКИХ КОЛЕБАНИЙ НА ОСНОВЕ ТЕНЗОРЕЗИСТИВНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2008 |
|
RU2387999C1 |
| Датчик давленя | 1977 |
|
SU711393A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1996 |
|
RU2110046C1 |
| Преобразователь давления | 1977 |
|
SU877375A1 |
| Акселерометр | 1982 |
|
SU1093981A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
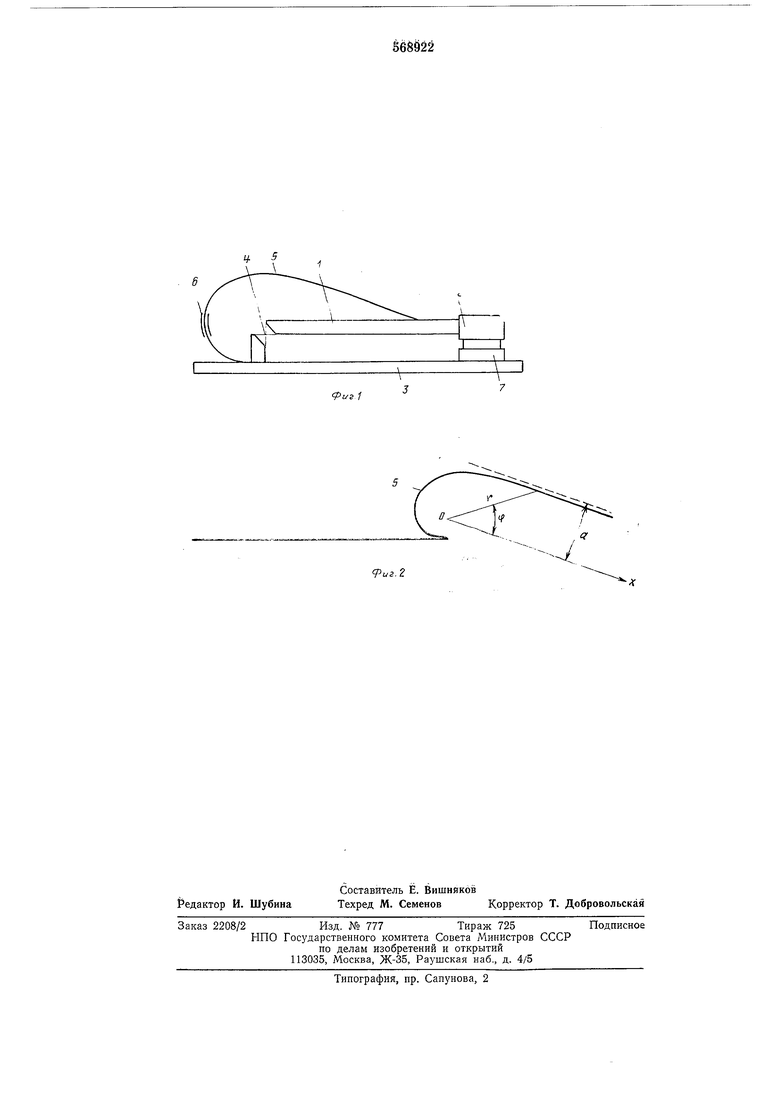
9иг.2
