С 5) ДАТЧИК ВИБРАЦИИ

| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик механических колебаний | 1982 |
|
SU1096591A1 |
| ГРАДИЕНТОМЕТР | 2019 |
|
RU2724461C1 |
| ТРЕХКОМПОНЕНТНЫЙ АКСЕЛЕРОМЕТР | 1972 |
|
SU419827A1 |
| Датчик механических величин | 2019 |
|
RU2725203C1 |
| ВЫСОКОЧУВСТВИТЕЛЬНЫЙ ШИРОКОПОЛОСНЫЙ УДАРОПРОЧНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2019 |
|
RU2716872C1 |
| Вертикальный сейсмоприемник | 1980 |
|
SU911406A1 |
| Устройство и способ для оценки динамических состояний рабочих органов вибрационных технологических машин | 2023 |
|
RU2820169C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДАТЧИК | 2003 |
|
RU2289821C2 |
| ЛАЗЕРНО-ИНТЕРФЕРЕНЦИОННЫЙ ВЕКТОРНЫЙ ПРИЕМНИК | 2019 |
|
RU2699926C1 |
| ИНФРАНИЗКОЧАСТОТНЫЙ ТРЕХКОМПОНЕНТНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДАТЧИК УСКОРЕНИЙ | 1997 |
|
RU2129290C1 |
1
Изобретение относится к виброметрии и может быть использовано при измерении параметров колебаний транспортных средств грунта, сооружений и т.п.
Известны датчики вибрации инерционного действия, содержащие корпус, инерционный элемент, соединенный с корпусом посредством пружины, упругий элемент, концы которого закреплены на корпусе, а центр-соединен с инерционным элементом, электромеханические преобразователи деформации, выполненные в виде тензоэлементов, наклеенных на упругий элемент fl 3
Недостатком таких датчиков является невозможность существенного уменьшения собственной частоты без снижения надежности. Это обусловлено закреплением инерционной массы непосредственно на упругом элементе и наличием пружины, соединяющей корпус с инерционным элементом. .
Известен также ускорениемер, со- . держащий корпус, инерционный элемент , выполненный как одно целое с корпусом и соединенный с ним посредством упругого перешейка, служащего осью вращения инерционного элемента,упругий элемент, концы которого закреплены в корпусе, а центр скреплен с инерционным элементом, и элек,Q тромеханические преобразователи деформации упругого элемента, выполненные в виде тензоэлементов,наклеенных на упругий элемент. Упругий перешеек введен для ограничения из)5 лишних степеней свободы инерционного элемента 2 .
Соединение инерционного элемента с корпусом посредством гибкого перешейка вызывает поглощение ускорения и значительно снижает чувствительность ускорениемера.
Наиболее близким по технической сущности к предлагаемому является акселерометр, содержащий корпус, сейсмомассу, упругий элемент в виде вертикальной консоли, соединеиной с преобразователем f3j
Недостаток акселерометра заклеивается в том, что инерционный элемент прикреплен к консоли и оказывается подвешенным на упругом элемвйте в положении устойчивого равновесия. Это увеличивает собственную частоту колебательной системы и период затухания колебаний инерционной массы и приводит к снижению его чувствительности в области низких частот. Введение компенсатора для гашения собственных колебаний инерционной массы и частичной разгрузки упругого элемента также снижает чувствительность акселерометра, так как значительная часть момента инерции при измерении вибрации расходуется на его деформацию.
Цель изобретения - уменьшение собственной частоты колебательной системы, увеличение коэффициента преобразования датчика.
Поставленная цель достигается тем что сейсмомасса одним из торцов установлена на нижнем конце вертикальной консоли с вооможностьо свободного перемещения относительно. :нее, а противоположным торцом - на основании корпуса в опоре качания.
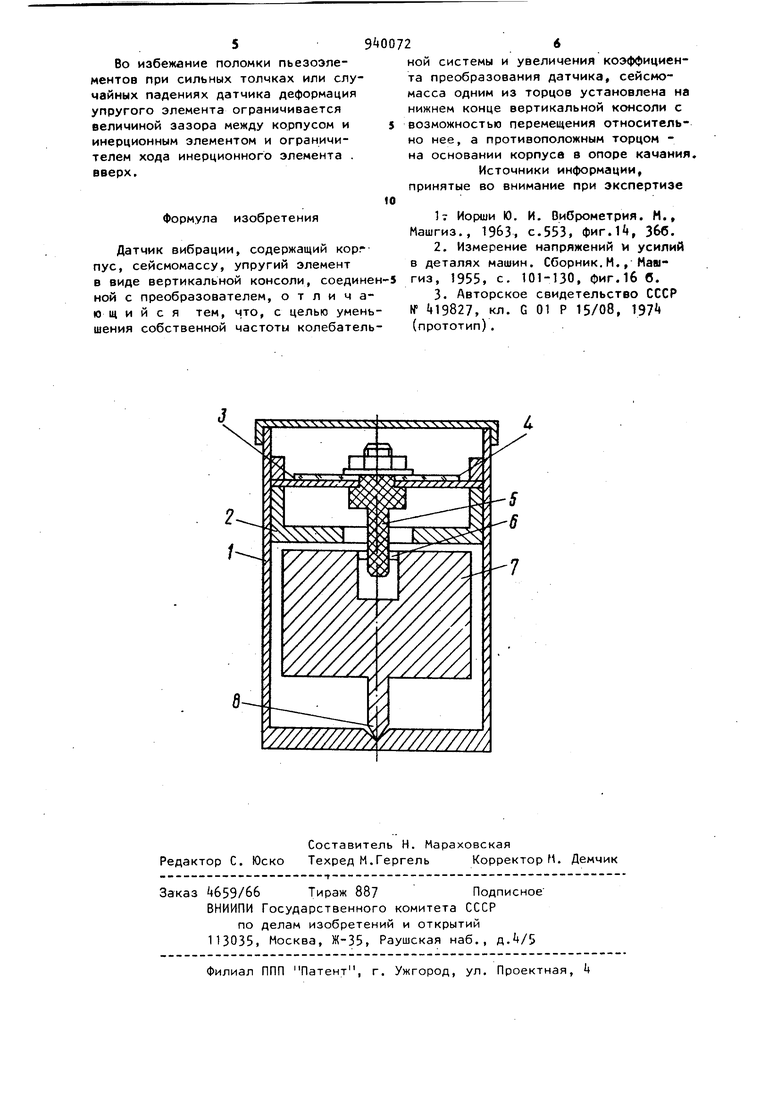
На чертеже схематично показан датчик вибрации.
Датчик состоит из корпуса :) ограничителя 2 хода вверх инерционного элемента, крестормны 3, на которой закреплены пьезоэлемёнты А, вертикальной консоли 5, закрепленной в центре крестовины, иарнира 6, выполненного в виде кольца, инерционного элемента 7, установленного на керне 8 в опоре на основании корпуса
Датчик работает следующим образом
В статическом положении:верхний конец вертикальной консоли 5 жестко соединен с центром крестовины 3, на которой наклеены пьезоэлементы k, а нижний конец консоли 5 находится в углублении инерционного элемента и по периметру соприкасается с кольцом 6, удерживая инерционный элемент 7 в положении .неустойчивого равновесия, близком к вертикальному. Нижняя часть инерционного элемента через керн 8 упирается в опору радиально-упорного типа на основании корпуса. При этом крестовина 3 и наклеенные на ней пьезоэлементы полностъо. разгружены в вертикальном направлении, а горизонтальная составляющая, образованная собственным весом инерционного элемента ja результате небольшого отклонения его от вертикальной оси, компенсируется за счет незначительной деформации крестовины 3 упругого элемента.
При наличии горизонтальных или угловых колебаний корпус датчика приобретает ускорение, которюе через нижний конец вертикальной консоли 5 и кольцо 6 шарнира передается инерционному элементу 7. Известно, что для выведения тела из положения неустойчивого равновесия достаточно малейшего усилия. Получив такое воздействие ,инерционный элемент 7 стремится перейти в положение устойчивого равновесия, наклоняется, вращаясь на керне 8, опирающемся в основание корпуса, и увлекает за собой нижний конец консоли 5. Это приводит к повороту верхнего конца консоли вокруг центра вращения в месте ее закрепления на крестовине 3. Упругий элемент крестовины и закрепленные на нем пьезоэлементы деформируются.
Наклон инерционного элемента приводит к смещению проекции центра тяжести на горизонтальную плоскость и создает момент силы, который нарастает по мере удаления центра тяжести от вертикальной оси, проходящей через точку опоры инерционного элемента, а это увеличивает деформацию пьезоэлементов, обеспечивая высокую чувствительность и максимально возможный диапазон напряжения сигнала датчика.
По мере увеличения изгиба упругого элемента и пьезоэлементов их сопротивление деформации возрастает и при достижении равенства сил деформации упругого элемента и момента силы инерционного элемента наклон пооледнего прекращается и он с помощью вертикальной консоли 5 возвращается в исходное положение. При этом равенство взаимодействующих сил упругого элемента и инерционного элемента сохраняется, взаимно убывая, вплоть до установки его в вертикальное положение, что почти полностью исключает появление собственной частоты, колебательной системы датчика. Во избежание поломки пьезоэяементов при сильных толчках или случайных падениях датчика деформация упругого элемента ограничивается величиной зазора между корпусом и инерционным элементом и ограничителем хода инерционного элемента . вверх. Формула изобретения Датчик вибрации, содержащий корг пус, сейсмомассу, упругий элемент в виде вертикальной консоли, соеди ной с преобразователем, отлич ющийся тем, что, с целью уме шения собственной частоты колебате ной системы и увеличения коэффициента преобразования датчика, сейсмомасса одним из торцов установлена на нижнем конце вертикальной консоли с возможностью перемещения относительно нее, а противоположным торцом на основании корпусе в опоре качания, Источники информации, принятые во внимание при экспертизе 1т Иорши Ю. И. Виброметрия. М., Машгиз., 1963, с,553, фиг.I, Збб. 2.Измерение напряжений и усилий в деталях машин. Сборник.М,, Машгиз, 1955, с. 101-130, фиг.16 в. 3.Авторское свидетельство СССР № 19827, кл. G 01 Р 15/08, 197 (прототип).
