I
ИзобрвтонЕе отвосатся к радио- в вэмЗ рителыюй технике в предназначево для обработки сигналов лазерных дошшёровских измерителей скорости потоков (ЛДИС).
Известен слешшшй фильтр-демодулятсф для измерения частоты сигналов досвл эов сквх измерителей скорости, сод эжавшй квадратур сле смесители, входы которых объединены и являются вхо/оом уСФ- ройсиаа, последстательно соедвнешаые рсюатель частотной ошибки, втегратсф я управляемый генератор кващ атурш 1Х сш налов, Ешходь которого соед1Ш а | со ми входами Kee lpaiTtuRUX/смесителей, а также 6noK:i affM«f yis&ix W
сигнала, вьгёО а1сото й) через грштер Шмидта соединен ; входом .уп|ра ВлеНвя ключа I.
Однако использование такой схемы для исслеловаш1я турбулентных течений, ско рость которых стро изменяется в широких пределах, ограничено появлением частотных искажений вследствие расширения спектра допплеровского сртгнала, а также вoз южиocтью срыва слежения из-оа того,
что допплерс ский сигнал окажется за пр&далами спектрального окна системы.
Целью Езо етення является повышение точности измерения частоты в широком диапазоне ее значе1гай. Для этого в слеяшовй фильтр-демодулятор для измвр&нив частоты сигналов дошш ювскнх измэршгелей скорости, содержащий квадратурные смесители, первые входы которалх объединены и являются входом устройства, последовательно соединенные формирстатель чаототной ошибки, интегратор в управляемый генератор квадратурных сигналов, выходы которого соединены со вторыми входами кващ)атурных смесителей, а также блок формирюванвя модулей сигнала, выход которого триггер Шмидта соединен с входом управления ключа, введены упра ляек{ые фильтры, включенные между выходами квадратурных смесителей и входами формирователя частотной ошибки в блока формирования квадрата модуля снгнала, частотный детектор ошибки, детектор частоты управляеьюго генератора, сумматор с запоминаюшей е костъю и схема управления фильт
рами. Вход частотного детектора ошибки соединен с выходом формирователячастотной ошибки, а выход - через ключ с первым входом cjn iMaTopa с запоминающей емкостью. Вход детектора частоты управляемого гвн&ратора соединен, с одним из выходов управляемого генератора квадратурных сигналов, а выход подключен ко второму входу сум- матора с запоминающей емкостью, выход которого через схему управления фильтрамь ,Q соединен со вторыми входами управляемых фильтров.
На фиг. 1 приведена структурная электрическая схема следящего фильтра-демодулятора; на фиг. 2 - пример реализации схемы 15 управляемого |}шльтра.
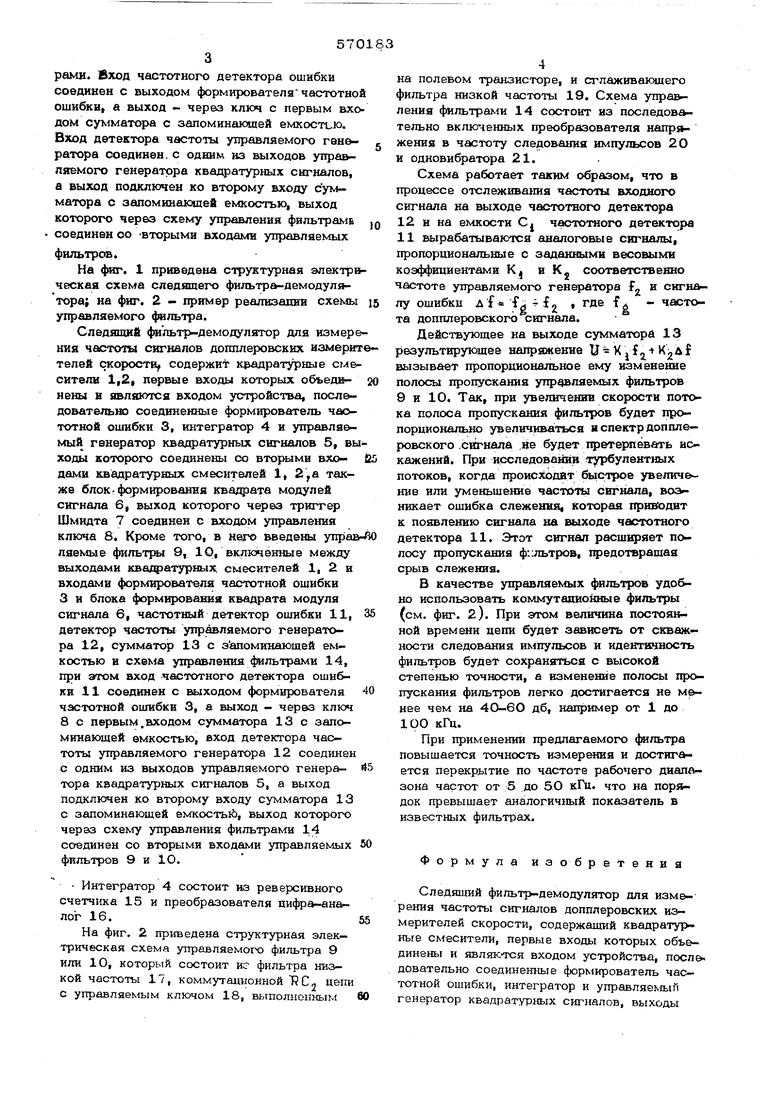
Следящий 4дальт| -демодулятор для измерения частоты сигналов допплеровских измеритетелей сжорости содержит квадратурные смесители 1,2, первые входы которых объеди- 20 иены н являются входом устройства, последовательно соединенные формирователь чаототной оигабки 3, интегратор 4 и управляемый генератор квадратурных сигналов 5, выходы которого соединены со вторыми вхо- U5 дами квадратурных смесителей 1, 2,а также блок- ф9рмировання квадрата модулей сигнала 6, выход которого через тригг Шмидта 7 соединен с входом управления ключа 8. Кроме того, в него введены управляемые фильтры 9, 10, включенные между выходами квафатурных смесителей 1, 2 и входами формирователя частотной ошибки 3 и блока формирования квадрата модуля сигнала 6, частотный детектор ошибки 11, 35 детектор частоты управляемого генератора 12, сумматор 13 с запоминаюшей емкостью и схема управления фильтрами 14, при этом вход -частотного детистора ошибки 11 соединен с выходом формирователя 40 частотной ошибки 3, а выход - через ключ 8 с первым,входом сумматора 13 с запоминающей емкостью, вход детектора частоты управляемого генератора 12 соединен с одним из выходов управляемого генера- rtS тора квадратурных сигналов 5, а выход подключен ко второму входу сумматора 13 с запоминающей емкостыЬ, выход которого через схеьгу управления фильтракга 14 соединен со вторыми входами управляемых 50 фильтров 9 и 1О.
Интегратор 4 состоит на реверсивного счетчика 15 и преобразователя нифра-анаглог 16.55
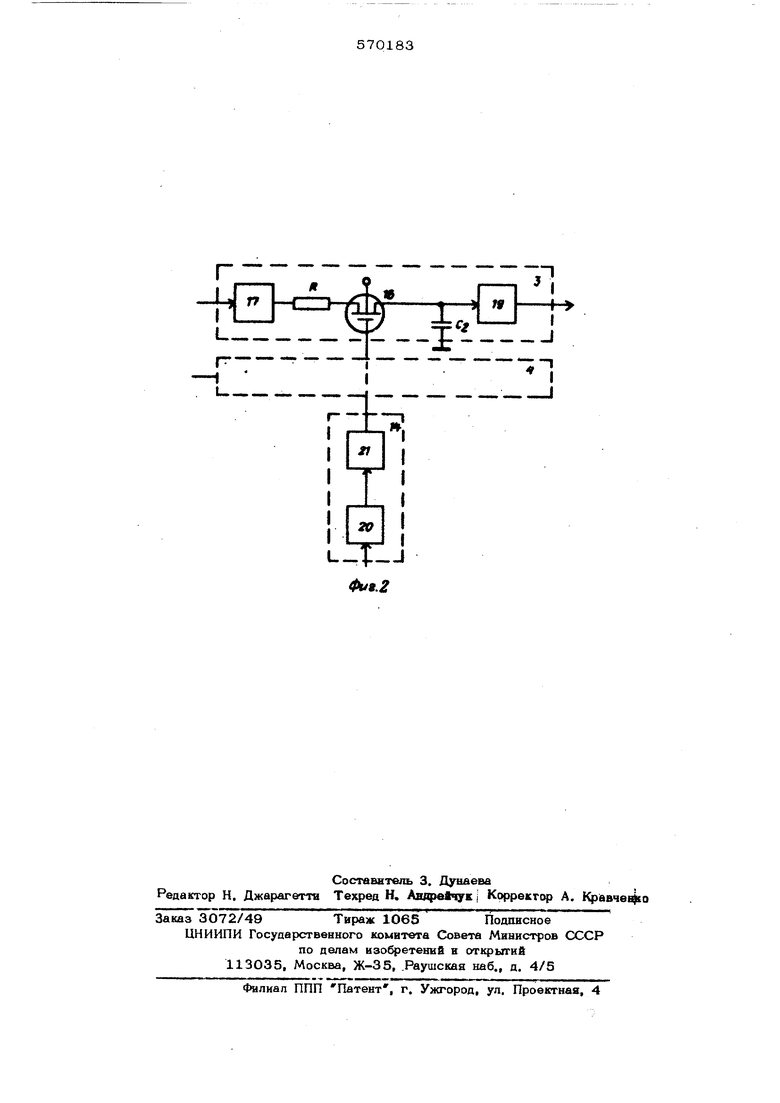
На фиг. 2 приведена структурная электрическая схема управляемого фильтра 9 или 10, который состоит ист фильтра низкой частоты 17, коммутационной С, цепи с управляемым ключом 18, выполненным 60
на полевом транзисторе, и сглаживающего фильтра низкой частоты 19. Схема упра&ления фильтрами 14 состоит из последовательно включенных преобразователя Hanpsbжения в частоту следования импульсов 20 и одновибратора 21.
Схема работает таким образом, что в процессе отслеживания частоты входного сигнала на выходе частотного детектора 12 и на емкости С. частотного детектора 11 вырабатываются гшалоговые сигналы, пропорциональные с заданными весовыми коэффициентами Kj и К. соответственно частоте управляемого генератора f и сигналу ошибки Д f« fg f 2 6 частота допплеровского сигнала.
Действующее на выходе сумматорй 13 результирующее напряжение U X j f j, f вызывает пропорциональное ему изменение полосы пропускания управляемых фильтров 9 и 10. Так, при увеличении скорости потока полоса пропускания фильтров будет пропорционально увеличиваться и спектр доппле- ровского .сигнала на будет претерпевать искажений. При исследовании турбулентных потоков, когда происходит быстрое увеличение или уменьшение частоты сигнала, возникает ошибка слеженшц Которая приводит к появлению сигнала иа выходе частотного детектора 11. Этот сигнал расширяет полосу пропускания фильтров, предотвращая срыв слежения.
В качестве управляеколх фильтров удобно использовать коммутаиио шые фильтры (см. фиг. 2). При этом величина постоянной времени цепи будет зависеть от скважности следования импульсов и идентичность фильтров будет сохраняться с высокой степенью точности, а изменение полосы пропускания фильтров легко достигается не менее чем на 4О-6О дб, например от 1 до 1ОО кГц.
При применении предлагаемого 4 1льтра повышается точность измерения и достигается перекрытие по частоте рабочего диапазона частот от 5 до 50 кГц. что на порядок превышает аналогичный показатель в известных фильтрах.
Формула изобретения
Следящий фильтр-демо1оглятор для измерения частоты сигналов допплеровских измерителей скорости, содержащий квадратур. ные смесители, первые входы которых объединены и являк-тся входом устройства, посл&. довательно соединенные формирователь частотной ошибки, интегратор и управляекшй генератор квадратурных сигналов, выходы
которого соединены со вторыми входами кващ атурных смесителей, а также блок фор мирования квадрата модулей сигнала, выход которого через триггер Шмидта соединен с входом управления ключа, отлвчаюш в и с я тем, что, с целью повышения точности, в него введены управляемые фильтры, включенные между выходами кваарлтурных смесителей и вьрсодамиформироват ля частотной ошибки и блока формироваяня квадрата модуля сигнала, частотный детмстсф ошибки, детектор частоты управляемого ген ратора, сумматор с запоминающей емкостью в схема управления фильтрами, при этом вход частотного детектора ошибки соединен с выходом формирователя частотной ошиб рси, а выход - через ключ с первым входом
сумматора с запоминающей емкостью, вход уДетектора частоты управляемого генератора соединен с одним из выходов управляемого генератора квадратурных сигналов, а выход подключен ко второму входу сумматора с запоминающей емкостью, выход которого через схему управления фильт1:)ами соединен со вторыми входами управляемых фильтров.
Источники информации, принятые во ви мание при экспертизе:
1, DuVraMi Т.З..Н.,Cheated С,, AM awaPysis of simuPators anci .IorckiHg ayelems fof fazet- doppPer veEoa4 waters,Oplo- e eclrott cs,W, 1973.
VOX 1 „
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий фильтр-демодулятор | 1978 |
|
SU748799A1 |
| Частотно-импульсное устройство автоподстройки частоты | 1983 |
|
SU1172010A1 |
| Следящее устройство для измерениядОпплЕРОВСКиХ СигНАлОВ | 1975 |
|
SU692379A1 |
| Частотно-импульсное устройство автоподстройки частоты | 1977 |
|
SU698113A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| Спектроанализатор | 1979 |
|
SU822069A1 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |