(54) ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ
.элемент ротора поляризуется по толщине подачей такого напряжения на его электроды, чтобы напряженность электрического поля бы.па выше 1кв мм. Для поляризации статора его разрезают на две половины, каждая из которых поляризуется подачей вышеназванного электрического поля на временные торцовые электроды. Затем торцовые электроды снимаются,а полукольца склеива ются с учетом направления их поляризации/ наносятся цилиндрические рабочие электроды и, наконец, износоустойчивое покрытие, роль которого могут играть металлокерамика, алунд, нитРИДЫ металлов и прочее.
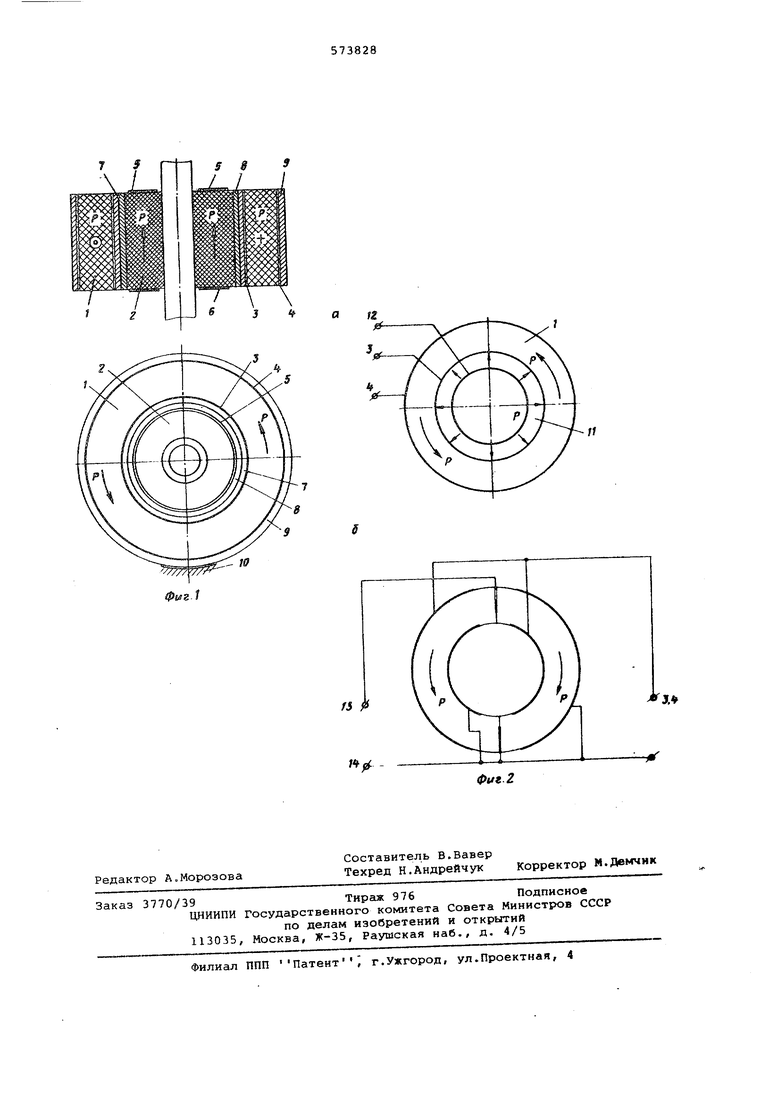
Напряжение источника питания подается на электроды 3 и 4 статора 1 и возбуждает его на одной из собственных резонансных частот по толщине, Одновременно со сдвигом фазы на 90 (или близко к 90) напряжение подается на электроды 5 и 6 ротора, который возбуждается на одной из собственных резонансных частот, близко лежащей по назначению к резонансной частоте статора. В момент, когда внутренняя поверхность Статора приобретает максимальную угловую скорост ротор касается его и вследствие фрикционного взаимодействия получает импульс момента вращения. Когда внутренняя поверхность статора движется в обратном направлении, ротор имеет минимальные, разлгеры и взаимодействие отсутствует (или сводится к минимуму} Если сдвиговые и радиальные колебания возбуждаются одновременно в статоре (см.фиг.2а и 26), в него либо добавляется пьезоэлемент 11, как на фиг.2а либо в щель, по которой склеены полукольца статора, наносятся sjfeKTpo J 13 и 14 (см. фиг.26). При этом подгонкой высоты цилиндра удается так подобрать размеры статора, что третья
гармоника сдвиговых колебаний по толщине оказывается равной или близкой второй гармонике продольных колебаний статора по толщине.
В предлагаемом пьезоэлектрического двигателе колебания сдвига возбуждаются по толщине кольца, следовательно, двигатель работает rfa более высоких частотах, чем у известных аналогов. Это в сочетании со значительным увеличением, площади механических контактов позволяет добиться большей удельной мощности двигателя на его единицу веса и одновременно обеспечивает значительное увеличение технического ресурса двигателя, что особенно важно для двигателей большой мощности (более 10 ВТ на валу)
.Формула изобретения
1.Пьез.оэл-ектрический двигатель, статор которого- содержит цилиндрический пьезоэпектрчческий полый цилиндр, внутри которого расположен цилиндрический ротор фрикционно взаимодействукядий со статором, отличающийся тем,.что, с целью увеличения моторесурса, пьезоэлектрический статор поляризован в направлении окружности, а электроды нанесены на его цилиндрической поверхности
2.Двигатель по п.1, отличающий с я тем что, ротор выполнен
в виде вибратора радиальных колебаний,частота резонанса которого совпадает или близка к резонансной частоте статора.
3.Двигатель поп.1, отличающийся тем, что статор содержит дополнительный цилиндрический пьезоэлемент с электродами на его цилиндрических поверхностях и поляризован по толщине.
f6
д

| название | год | авторы | номер документа |
|---|---|---|---|
| Пьезоэлектрический реверсивный двигатель | 1977 |
|
SU642802A1 |
| Пьезоэлектрический преобразователь электрического сигнала в поступательное перемещение | 1974 |
|
SU575790A1 |
| Пьезокерамический резонатор | 1990 |
|
SU1757084A1 |
| Пьезоэлектрический двигатель | 1980 |
|
SU1023455A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167489C2 |
| ПЬЕЗОКЕРАМИЧЕСКИЙ ВИБРАТОР'' | 1972 |
|
SU344668A1 |
| Способ определения упругих податливостей s11Е, s12Е, s13Е, s33Е и пьезоэлектрических модулей d31,d33 на одном образце в виде диска | 2016 |
|
RU2629927C1 |
| Пьезоэлектрический реверсивный привод | 1991 |
|
SU1827708A1 |
| Пьезоэлектрический двигатель | 1991 |
|
SU1807548A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2153219C2 |