Настоящее изобретение относится к области электрических двигателей, а более точно - к пьезоэлектрическим шаговым двигателям, и может быть использовано в качестве исполнительного механизма в электротехнике, телемеханике, радиотехнике и автоматике.
Известен пьезоэлектрический шаговый двигатель, содержащий блок питания, ротор, статор, движительные биморфные пьезоэлементы и фиксирующие элементы (авторское свидетельство СССР N 769665, МКИ H 01 L 41/08).
Однако в конструкции пьезоэлектрического шагового двигателя биморфный пьезоэлемент имеет незначительный контакт с ротором, что влечет за собой неравномерность шага углового перемещения ротора.
Наиболее близким аналогом к предлагаемому изобретению является пьезоэлектрический шаговый двигатель, статор которого содержит цилиндрический полый цилиндр, внутри которого расположен цилиндрический ротор, фрикционно взаимодействующий со статором (авторское свидетельство СССР N 573828, МКИ H 01 L 41/00).
Однако пьезоэлектрический двигатель работает за счет сдвигающих и радиальных колебаний ротора и статора, фрикционного их взаимодействия, при этом нельзя обеспечить равномерного углового перемещения ротора и точного его позицирования.
В основу настоящего изобретения была положена задача создания пьезоэлектрического шагового двигателя, конструктивное выполнение которого позволило бы упростить конструкцию и технологию изготовления, получить большой крутящий момент при малых габаритах и массе и обеспечить равномерное вращение ротора, а также осуществить реверс.
Это достигается тем, что в пьезоэлектрическом шаговом двигателе, содержащем корпус, статор в виде цилиндрического пьезоэлектрического полого цилиндра, внутри которого расположен цилиндрический ротор, фрикционно взаимодействующий со статором, согласно изобретению статор состоит из вращательно-фиксирующих пьезоблоков, которые расположены внутри корпуса в одной или более поперечных плоскостях и имеют форму секторов, причем каждый пьезоблок состоит из вращательного и фиксирующего пьезоэлементов, изоляторов и фрикционного элемента, а ротор имеет не менее одной направляющей, которая входит в соответствующую направляющую на фрикционных элементах, выполненных в виде разрезного кольца.
Целесообразно, чтобы промежутки между пьезоблоками были заполнены эластичным изоляционным материалом.
Пьезоэлементы могут быть выполнены в виде набора из пьезоэлектрических секторов, электроды которых соединены параллельно через один, при этом направление поляризации каждого последующего пьезоэлектрического сектора было направлено в противоположную сторону от предыдущего.
Далее изобретение поясняется описанием конкретных примеров его выполнения и прилагаемыми чертежами, на которых:
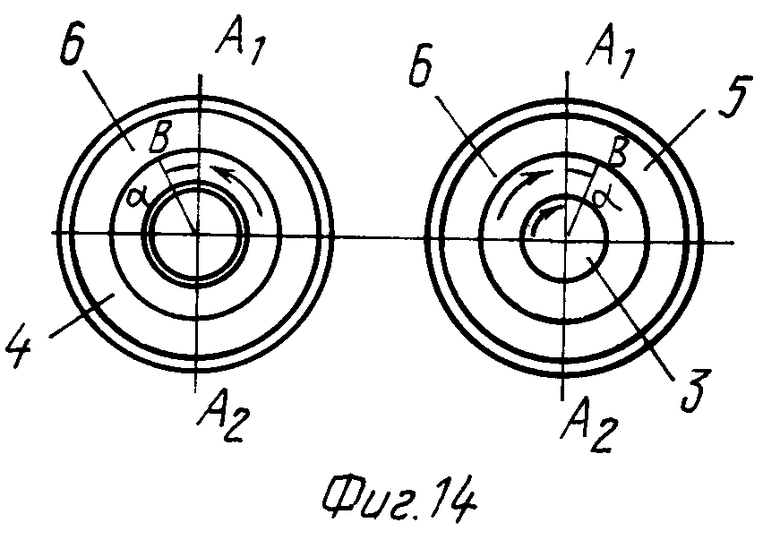
фиг. 1 изображает пьезоэлектрический шаговый двигатель (вид спереди);
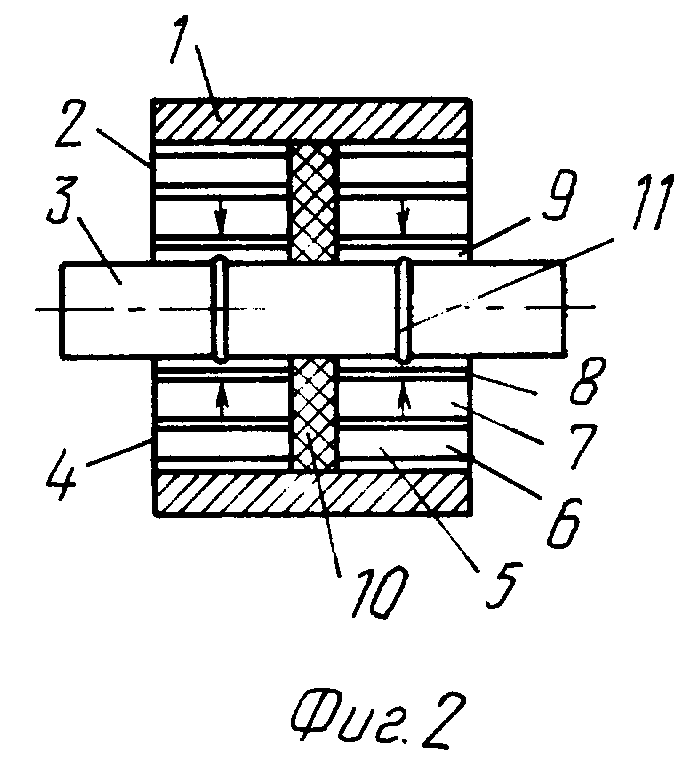
фиг. 2 - то же, что на фиг. 1, продольный разрез;
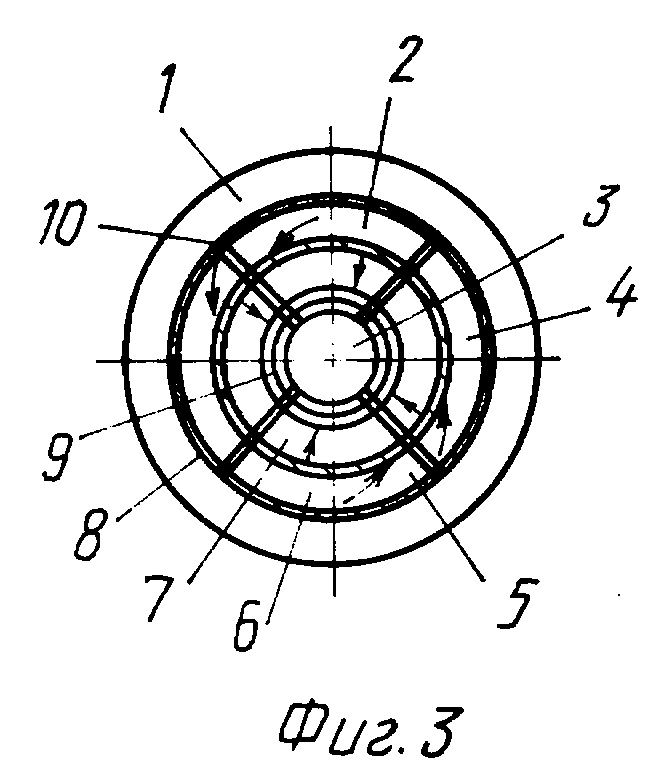
фиг. 3 - другой вариант исполнения двигателя (вид спереди);
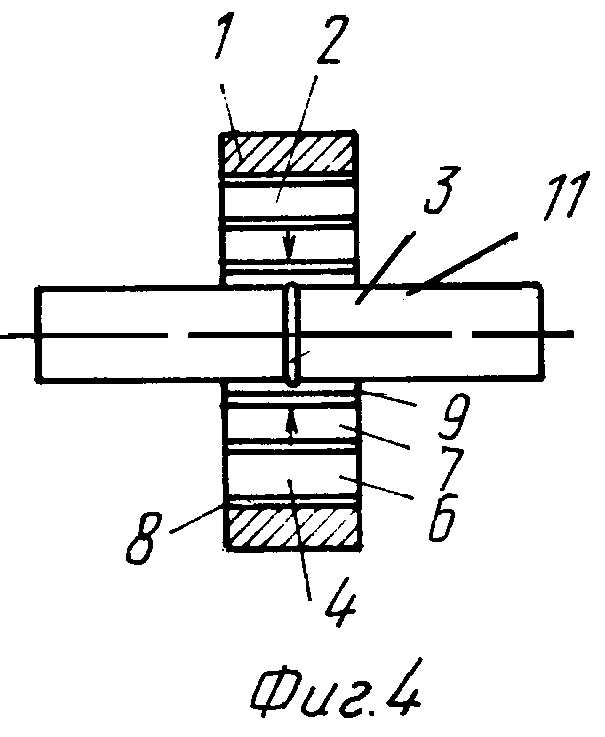
фиг. 4 - то же, что на фиг. 3, продольный разрез;
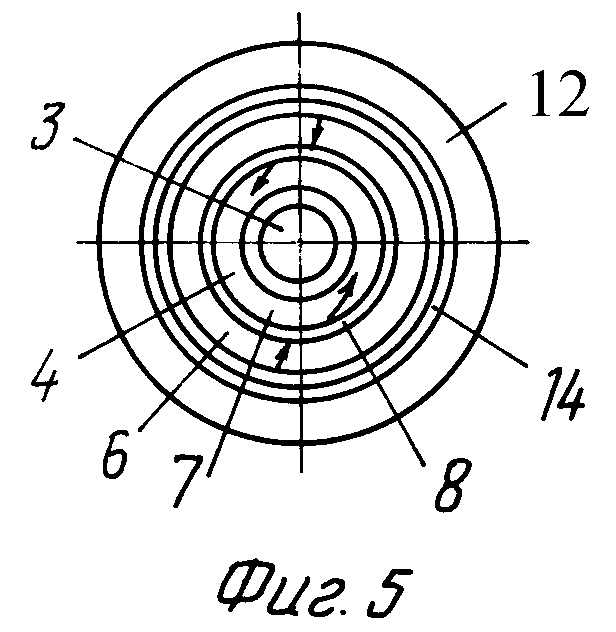
фиг. 5 - еще один вариант исполнения двигателя (вид спереди);
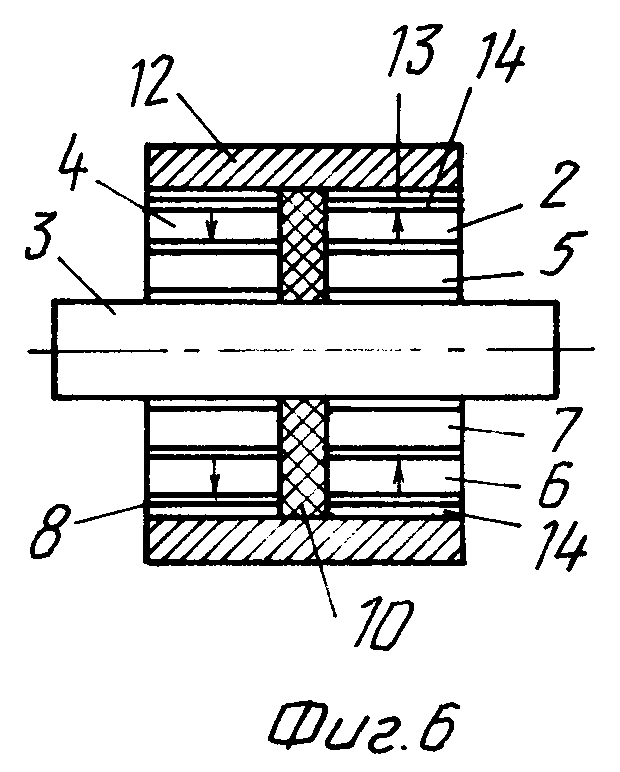
фиг. 6 - то же, что на фиг. 5, продольный разрез;
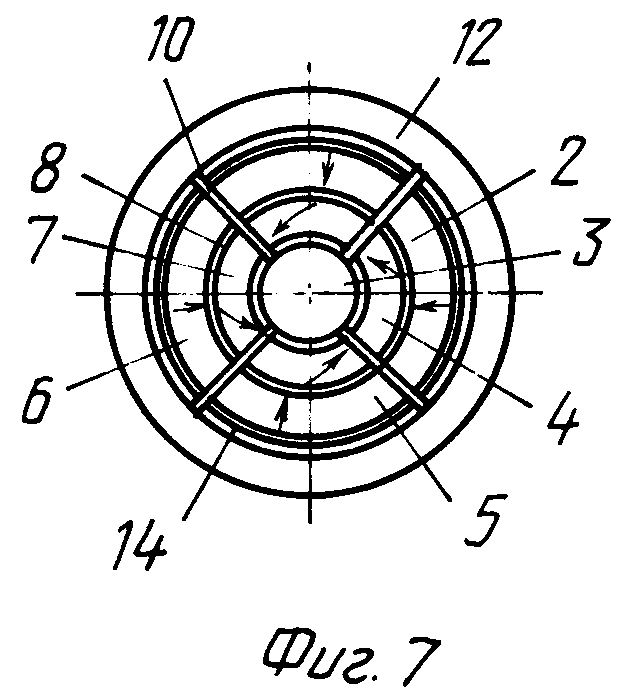
фиг. 7 - один из вариантов исполнения двигателя (вид спереди);
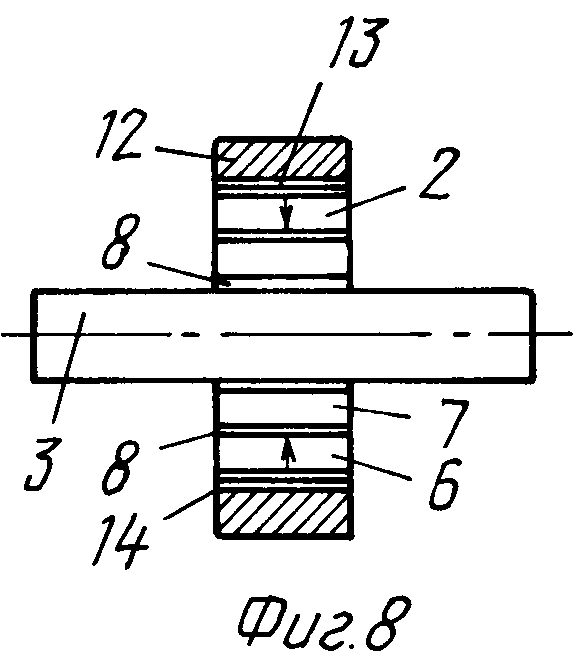
фиг. 8 - то же, что на фиг. 7, продольный разрез;
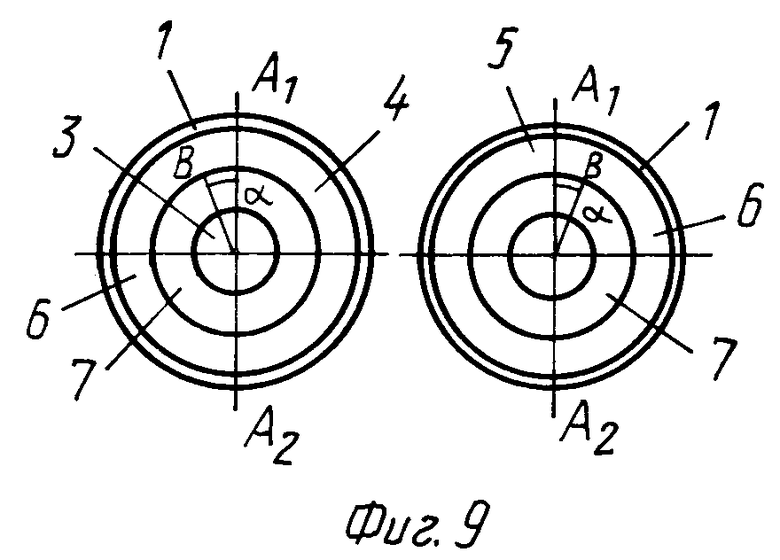
фиг. 9 - первый такт работы пьезоэлектрического шагового двигателя, два поперечных разреза одного и второго вращательно-фиксирующих блоков;
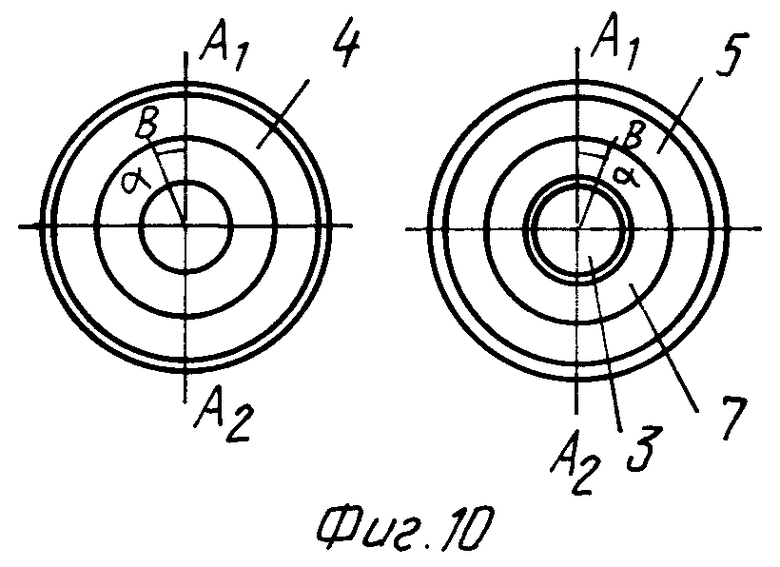
фиг. 10-14 - остальные такты работы пьезоэлектрического шагового двигателя.
Пьезоэлектрический шаговый двигатель содержит цилиндрический корпус 1 (фиг. 1), статор 2 и ротор 3 в виде цилиндрического стержня. Статор 2 выполнен в виде двух вращательно-фиксирующих пьезоблоков 4 и 5 (фиг. 2). Каждый пьезоблок состоит из соединенных между собой вращательного пьезоэлемента 6, фиксирующего пьезоэлемента 7, изоляторов 8 и фрикционного элемента 9. Фиксирующие пьезоэлементы 7 имеют радиальный вектор поляризации. Фрикционный элемент 9 выполнен в виде разрезного кольца, это обеспечивает более плотное обжатие ротора 3.
Промежутки между вращательно-фиксирующими пьезоблоками заполнены эластичным изоляционным материалом 10. На роторе 3 выполнены направляющие 11 в виде выступа для исключения осевого перемещения ротора. Эти направляющие 11 входят в соответствующие направляющие на фрикционных элементах 9.
Каждый пьезоэлемент имеет электроды, к которым подключены провода (эти элементы на чертеже не показаны).
Возможны другие варианты исполнения пьезоэлектрического шагового двигателя.
В другом варианте по фиг. 3 и 4 в отличие от первого вращательно-фиксирующие пьезоблоки расположены в одной поперечной плоскости и выполнены в виде секторов. Это значительно снижает габаритные размеры и массу двигателя.
Вариант по фиг. 5 и 6 отличается от первого тем, что ротор 3 неподвижен, а цилиндрический корпус 12 вращается. На внутренней поверхности цилиндрического корпуса 12 выполнены направляющие 13, которые входят во впадины на фрикционных элементах 14.
В варианте по фиг. 7 и 8 ротор 3 неподвижен, а цилиндрический корпус 12 вращается, при этом пьезоблоки выполнены в виде секторов и расположены в одной поперечной плоскости.
Двигатель работает следующим образом.
При подаче на электроды вращательного пьезоэлемента 6 (фиг. 9) положительного напряжения за счет обратного пьезоэффекта происходит сдвиг внутренней части кольца на угол α против часовой стрелки относительно диаметральной линии A1A2, при этом точка В, расположенная на внутренней части кольца, смещается по дуге на угол α против часовой стрелки.
При подаче отрицательного напряжения на электроды вращательного пьезоэлемента 6 происходит сдвиг внутренней части кольца на угол α по часовой стрелке относительно диаметральной линии A1A2, при этом точка B, расположенная на внутренней части кольца, смещается на угол α по часовой стрелке.
При подаче положительного напряжения на фиксирующие пьезоэлементы 7 происходит обжим ротора 3, а при подаче отрицательного напряжения пьезоэлементы отжимаются от ротора 3.
Рабочий цикл состоит из шести тактов.
Положение пьезоэлементов, соответствующее первому такту, изображено на фиг. 9. На пьезоэлементы пьезоблока 4 подано положительное напряжение, при этом вращательный пьезоэлемент 6 смещает фиксирующий пьезоэлемент 7 на угол α против часовой стрелки, пьезоэлемент 7 зажимает ротор 3. На пьезоэлемент 6 пьезоблока 5 подано отрицательное напряжение, а на фиксирующий пьезоэлемент 7 пьезоблока 5 - положительное, при этом вращательный пьезоэлемент 6 смещает фиксирующий пьезоэлемент 7 на угол α против часовой стрелки, а фиксирующий пьезоэлемент 7 зажимает ротор 3.
Во втором такте (фиг. 10) на фиксирующий пьезоэлемент 7 пьезоблока 5 подается отрицательное напряжение, при этом он отжимается от ротора.
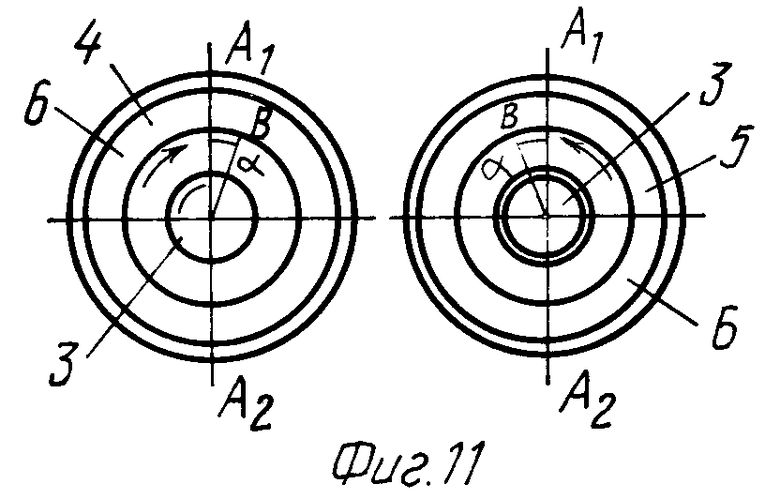
В третьем такте (фиг. 11) отрицательное напряжение подается на вращательный пьезоэлемент 6 пьезоблока 4, который поворачивает совместно фиксирующий пьезоэлемент 7 и ротор 3 на угол 2α по часовой стрелке. При этом на вращательный пьезоэлемент 6 пьезоблока 5 подается положительное напряжение и происходит сдвиг фиксирующего пьезоэлемента 7 на угол 2α против часовой стрелки.
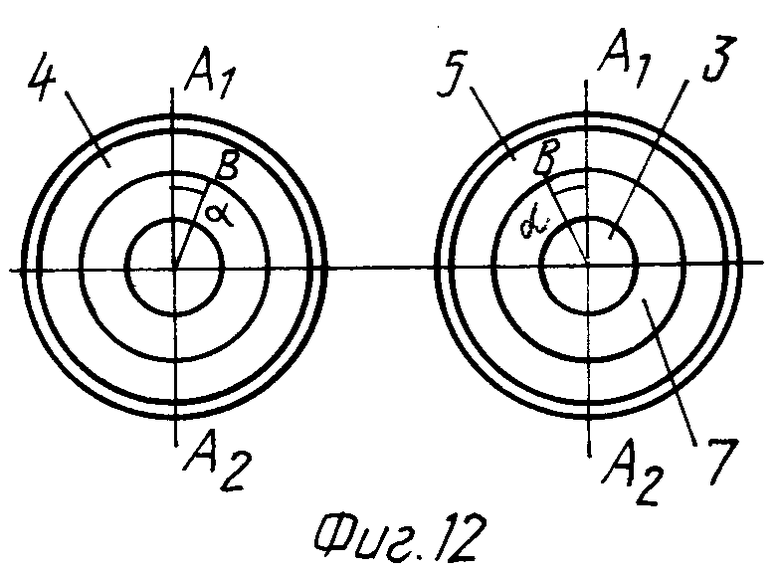
В четвертом такте (фиг. 12) на фиксирующий пьезоэлемент 7 пьезоблока 5 подается положительное напряжение и происходит обжатие ротора 3.
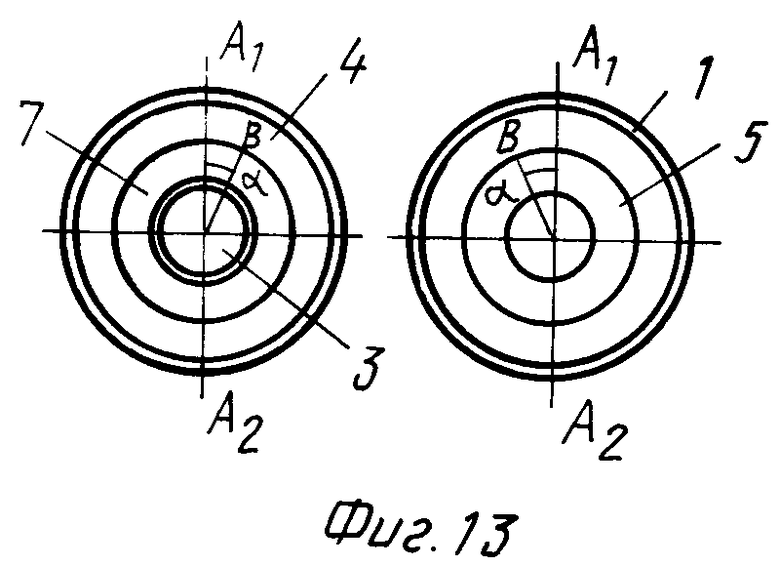
В пятом такте (фиг. 13) на фиксирующий пьезоэлемент 7 подается отрицательное напряжение и он отжимается от ротора 3.
В шестом такте (фиг. 14) положительное напряжение подается на вращательный пьезоэлемент 6 пьезоблока 4, который смещается на угол 2α против часовой стрелки. На вращательный пьезоэлемент 6 пьезоблока 5 подается отрицательное напряжение и он поворачивает ротор 3 на угол 2α по часовой стрелке.
За один рабочий цикл ротор поворачивается на угол 4α. Далее происходит повторение этих циклов, при этом ротор вращается по часовой стрелке. Для осуществления реверса необходимо изменить порядок подачи напряжения на фиксирующие пьезоэлементы.
При вращении корпуса используется такой же рабочий цикл, только вращательный и фиксирующий пьезоэлементы меняются местами.
Для увеличения мощности пьезоэлектрический шаговый двигатель может быть снабжен дополнительными пьезоблоками, которые могут быть расположены как в поперечной, так и в продольной плоскости двигателя.
Пьезоэлектрический шаговый двигатель обеспечивает большой крутящий момент на роторе, равномерное вращение, точное позицирование и реверс.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167489C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2161364C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167486C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167487C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2156535C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2181522C2 |
| УСТРОЙСТВО ДЛЯ БЕЗОПИЛОЧНОГО РЕЗАНИЯ ДРЕВЕСИНЫ | 1994 |
|
RU2084333C1 |
| УЛЬТРАЗВУКОВОЙ УТЮГ | 1995 |
|
RU2083745C1 |
| ТОПЛИВНЫЙ БАК | 1994 |
|
RU2086426C1 |
| МАССАЖНАЯ ЩЕТКА | 1995 |
|
RU2112493C1 |
Область применения: электротехника, телемеханика, радиотехника и автоматика. Сущность: корпус, статор в виде пьезоэлектрического блока, ротор. Статор состоит из вращательно-фиксирующих пьезоблоков, которые расположены внутри корпуса в одной или более поперечных плоскостях. Каждый пьезоблок состоит из вращающего и фиксирующего пьезоэлементов, изоляторов и фрикционного элемента. Ротор имеет не менее одной направляющей, которая входит в соответствующую направляющую на фрикционных элементах, выполненных в виде разрезного кольца. Промежутки между пьезоблоками могут быть заполнены эластичным изоляционным материалом. Пьезоэлементы могут быть выполнены в виде набора из пьезоэлектрических секторов. Технический результат: повышение срока службы, возможность изменения скорости вращения ротора, осуществление непрерывного вращения. 2 з.п. ф-лы, 14 ил.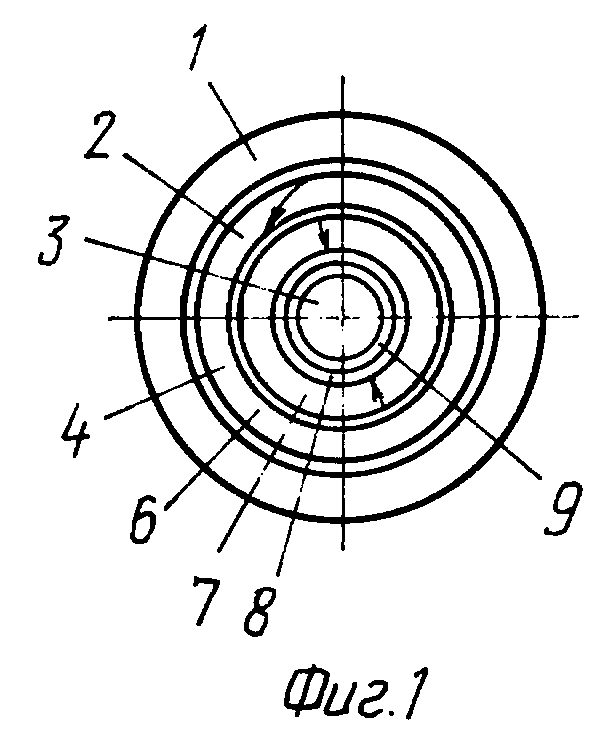
| US 5136201 A, 04.08.1992 | |||
| Шаговый двигатель | 1977 |
|
SU738016A1 |
| Пьезоэлектрический шаговый двигатель | 1979 |
|
SU843032A1 |
| Пьезоэлектрический двигатель | 1976 |
|
SU573828A1 |
| УСТРОЙСТВО для КЛАССИФИКАЦИИ ЗЕРНИСТЫХ МАТЕРИАЛОВ | 0 |
|
SU360975A1 |

