Сооружение посадочных для самолетов и тому подобных площадок распадается на ряд отдельных и по характеру различных категорий работ, выполняемых различными средствами. В общем случае эти работы сводятся к планировке местности и к образованию поверхности почвы, удовлетворяющей соответствующим техническим условиям.
Первая категория работ может выполняться различными дорожными мащинами, но ни одна из известных дорожных машин не может удовлетворить полностью предъявляемым требованиям в отношении быстроты выполнения работы.
Так, например, экскаватор может работать эффективно лишь в том случае, если сумма земляных работ сосредоточена на небольшом участке в виде мощного массива. При планировочных же работах объекты экскавации разбросаны. Кроме того при экскавации необходимо отвозить грунт специальным транспортом, а для разравнивания грунта на планируемой площадке необходимы приспособления и механизмы, предназначенные для этой цели.
Грейдер производит лишь срезку грунта, оставляя его на месте, следовательно, в этом случае необходимо иметь ряд средств для транспорт-, рования грунта и для погрузки и выгрузки его.
Грейдер-экскаватор, хотя и сам производит нагрузку срезанного грунта, но он мало пригоден для планирования площадей из-за узкого захвата.
Тракторные лопаты имеют весьма малую производительность и непригодны для выполнения работ в короткие сроки.
Скреперные устройства также мало производительны из-за частого переноса опорных блоков и из-за обратных холостых пробегов. Предлагаемая машина имеет целью устранить недостатки, присущие известным земляным машинам. Она может производить планировку местности в кратчайший срок, не требует транспорта для отвозки срезанного грунта, а срезая грунт, укладывает его в выемки местности, создавая ровную площадку.
Особенностью этой машины является бесконечная цепь, снабженная рядом специальных скреперных лопат, причем эта цепь так монтирована, что обе ее ветви являются рабочими.
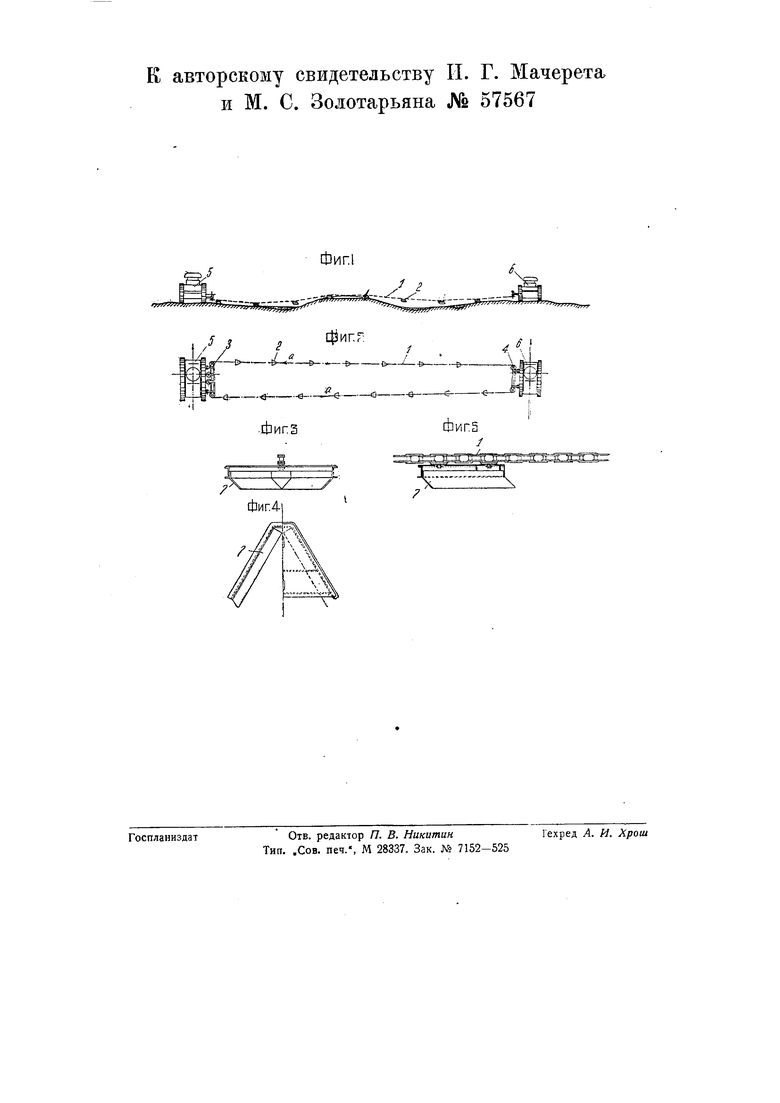
На чертеже представлена пример- I ная форма осуществления изобретения, причем фиг. 1 изображает установку в виде спереди; фиг. 2 - вид в плане; фиг. 3 - вид скреперной лопаты спереди; фиг. 4 - вид ее в плане; фиг. 5 - продольный разрез лопаты.
Планировочная машина состоит из бесконечной цепи /, на которой на определенном расстоянии укреплены скреперные лопаты 2. Цепь огибает четыре блока, из которых два приводных. Эти блоки монтированы на кронштейнах 3 к 4, прикрепленных к рамам двух тракторов или танков 5 и 6.
Блоки имеют вертикальные оси вращения, так что обе ветви располагаются в одной горизонтальной плоскости.
Скреперная лопата имеет в плане (фиг. 4) форму треугольника и образована двумя установленными под углом друг к другу ножами 7. Нижние кромки ножей отогнуты внутрь лопаты. Сверху скреперная лопата закрыта листом с ребрами жесткости.
При работе оба трактора с надетыми цепями и скреперными лопатами имеют сравнительно медленные поступательные движения; расстояние между тракторами определяет ширину планируемой полосы; она может быть различной в зависимоси от характера обрабатываемого грунта. Цепь движется в направлении, указанном на чертеже стрелками а, а, со скоростью около 7 м в секунду. Натяжение цепи осуществляется следующим образом: трактор 5, несущий привод и более тяжелый, движется по выбранному направлению. Трактор 6 выбирает направление, несколько отклоненное от параллельного первому (фиг. 2). Поперечная составляющая перемещения заставляет второй трактор натягивать цепь; после предельной натяжки второй трактор движется поступательно с поперечным скользящим трением о грунт.
Натянутая цепь прижимает прикрепленные скреперные лопаты к
грунту на выпуклых местах и оттягивает на углублениях. На выпуклых местах в первый момент лопата производит зачерпывание грунта, затем транспортирует его до углубления,, где цепь оттягивает вверх корпус лопаты и тем самым автоматически ее разгружает. Если поверхность не имеет углублений и выпуклостей, то заполненные скреперные лопаты скользят по грунту, не зачерпывая его и не разгружаясь.
Лопаты движутся последовательно одна за другой, последовательно автоматически проделывая операции, экскавации, скреперования и разгрузки сообразно с профилем, выравнивая его.
Если только производительностьмашины не обеспечивает планировки за один проход, таковая производится, в несколько проходов.
Так как машина выравнивает профиль между тракторами, то в местах прохода самих тракторов поверхность остается в прежнем состоянии. Для получения широких площадок необходимо параллельный проход, машины производить перекрытием пройденной ширины до половины.
Планировочная машина дает возможность быстро и без особой подготовки простыми средствами соорудить посадочную площадку, что иметь широкое применение в. условиях военного времени.
Предмет изобретения.
1.Машина для планировки площадок, состоящая из двух параллельно движущихся моторных повозок, поддерживающих бесконечную землечерпательную цепь, отличающаяся тем, что обе ветви цепи расположены в общей горизонтальной плоскости и снабжены несколькими скреперными лопатами.
2.Форма выполнения машины по п. 1, отличающаяся тем, что каждая скреперная лопата образована двумя установленными под углом друг к другу и отогнутыми внутрь ножами.
к авторскому свидетельству И. Г. Мачерета и М. С. Золотарьяна № 57567
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование гидравлического одноковщового экскаватора | 1975 |
|
SU653345A1 |
| Крановое погрузочное устройство для многопролетных сооружений | 1937 |
|
SU52895A1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| СПОСОБ СТРОИТЕЛЬСТВА ЗАГЛУБЛЕННЫХ В ГРУНТ И/ИЛИ ПОДЗЕМНЫХ, И/ИЛИ ПОДВОДНЫХ ЗДАНИЙ, СООРУЖЕНИЙ И ИХ ИНЖЕНЕРНОГО ОБУСТРОЙСТВА И СПОСОБ ЭКСПЛУАТАЦИИ И/ИЛИ РЕМОНТА, И/ИЛИ РЕКОНСТРУКЦИИ, И/ИЛИ ВОССТАНОВЛЕНИЯ ЗАГЛУБЛЕННЫХ В ГРУНТ И/ИЛИ ПОДЗЕМНЫХ, ИЛИ ПОДВОДНЫХ ЗДАНИЙ, СООРУЖЕНИЙ И ИНЖЕНЕРНОГО ОБУСТРОЙСТВА | 1995 |
|
RU2075573C1 |
| Ковш землеройной машины | 1990 |
|
SU1789600A1 |
| Способ планировки рисовых чеков | 1984 |
|
SU1288274A1 |
| Способ возведения насыпи | 1988 |
|
SU1724814A1 |
| Способ прокладки дренажных труб в железнодорожных насыпях | 1937 |
|
SU52710A1 |
| Устройство для управления заглублением рабочего органа землеройной машины, преимущественно одноковшового экскаватора | 1961 |
|
SU149199A1 |
| СПОСОБ ЗАКРЕПЛЕНИЯ ТРУБОПРОВОДОВ | 2001 |
|
RU2227238C2 |
ФигЛ
.
frrrr
