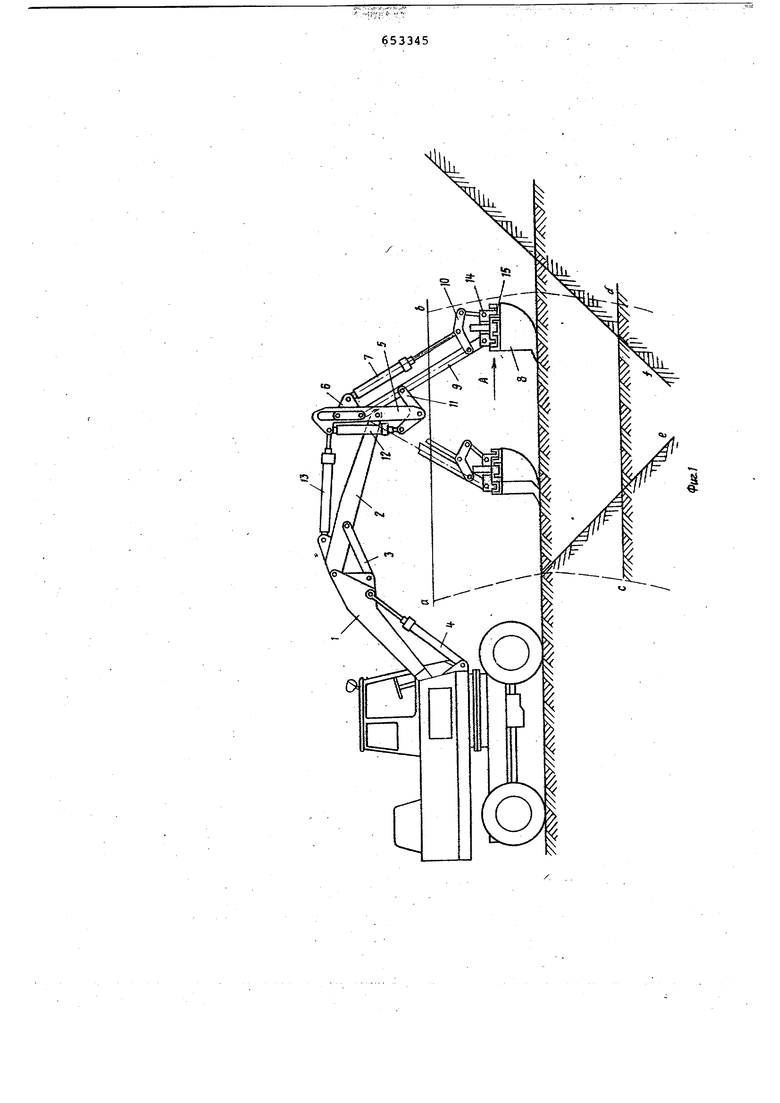
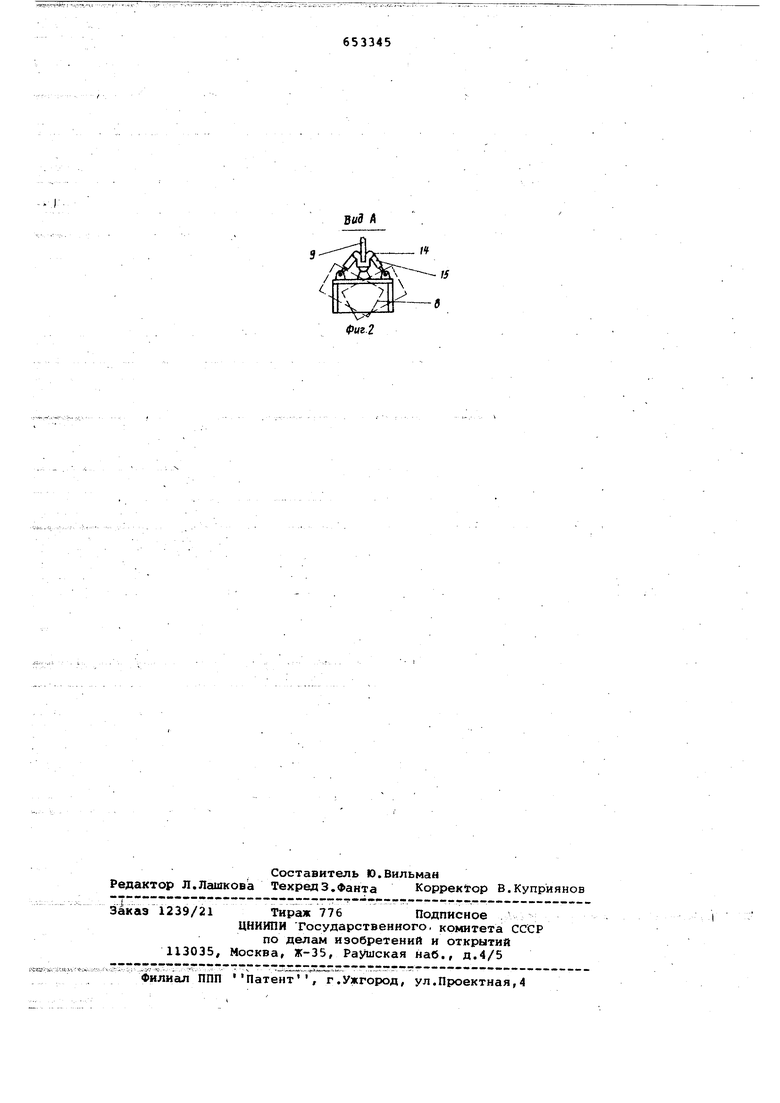
(Ь4) РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ОДНОКОВиОВОГО ЭКСКАВАТОРА на 5 с направляющими для ползуна 6, который вместе с силовым цилиндром 7 управления ковшом 8, р:,коятью 9 и одним плечом двуплечего jawara Ю по ворота ковша образуют шарнирный регулируекий параллелрграмный четЫ рехзвенник. Промежуточное звено 11 шарнирно соединено с силовым вдарниро 12 рабочего хода планирования, а силовой цилиндр 13 управления рукоятью и изменения угла планирования крепит ся к верхней части стрелы и к звену Ковш 8 соединен с рукоятью и двуплечим рычагом ГО поворота ков$аа через промежуточное звено 14, отнбситёльно которого силовыми цилиндрами 15 ковш может поворачиваться в обе стороны из плоскости копания. Рабочее оборудование работает как обратная лопата и как планировщик. Перемещение ковша при работе обратной лопаткой происходит под действием силового цилиндра 13 при запертом силовом цилиндре 12. При этом звено 5 вместе с рукоятью 9 и ковшом 8 поворачиваются вокруг точки крепления звена 5 к верхней части стрелы 2. Режущая ковша 8 описывает дугу окружности, при этом происходит резание грунта и наполнение ковша. Возможно также-резание грунта и наполнение ковша под де|1ствнем силового цилиндра 7 при запертых силовых цилиндрах 12 и 13. При этом режущая кромка ковша 8 описывает дугу окружности с центром в точке крепления ковша 8 к рукояти 9. Ковш при планировании или зачистке дна земляных сооружений перемещается под действием силового цилиндра 12 при запертых цилиндрах 7 и 13. Цилиндр 12 поворачивает промежуточное звено 11, при этом происходит сложное движение рукояти с с поворот относительно точки крепления рукояти к ползуну би поступательное движение рукояти 9 с ковшом 8 Bi ecте с ползуном 6. Длины звеньев 6, 1 и 9 подобраны такими, что режущая кромка ковша перемещается по траекторик, близкой к прямолинейной и перпендикулярной к продольной оси эвена 5 Звенья 6,7,10 и 9 при планировани образуют шарнирный регулируемый параллелограммный четырехзвенник1 Ковш при движении перемещается поступательно, с постоянным углом реэания. Зона горизонтальной планировки ниже, вьше и на уровне стоянки экскаватора обозначена буквами а,в. и c-,d. Возможна планировка наклонных поверхностей (например, обозначенных на чертеже линиями е и )/, при этом изменение угла планирования производится поворотом звена 5 силовым цилиндром 13 на некоторый угол. На такой же угол наклонится и траектория движения режущей кромки ковша. , За счет поворота ковша силовыми цилиндрами 12 из плоскости копания компенсируется неточность установки экскаватора в вертикальной плоскости, а также обеспечивается планировка поверхностей, наклонных к продольной оси экскаватора. Таким образом, без перемонтажа оборудования осуществляется полный цикл земляных работ, включающий разработку грунта и планировку дна и откосов земляных сооружений до числоВЬ1Х отметок без применения ручного труда. Для работы прямой лопатой или погрузчиком достаточно переставить ковш, повернув его на 180. Для увеличения параметров рабочего оборудования раскос 3 может заменяться силовым цилиндром. Формула изобретения Рабочее оборудование гидравлического одноковшового экскаватора, включающее стрелу, ковш, силовые цилиндры и рукоять, соединенную с помощью промежуточных звеньев со звеном, шарнирно монтированным на стреле и связанным с цилиндром его поворота, при этом одно из промежуточных звеньев установлено с возможностью поворота с помощью силового 1|илиндра, который шарнирно закреплен на звене, шарнирно монтированным на стреле, и цилиндр управления ковшом, шток которого соединен с двуплечим рычагом поворота ковша, отличающееся тем, что, с целью обеспечения постоянного угла резания и повышения качества планируемой поверхности, другое промежуточное звено, соединяющее рукоять со звеном, шарнирно монтированным на стреле, выполнено в виде ползуна и непосредственно связано с силовым цилиндром управления ковшом, причем этот цилиндр, ползун, рукоять и часть двуплечего рычага образуют шарнирный регулируемый четырехзвенник. Источники информации, принятые во внимание при экспертизе 1, Патент ГДР W 75.274, . клс 84 d 3/38, 1960. 2 о Авторское свидетельствоСССР 343002, кл. Б 02 Г 3/36, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1972 |
|
SU343002A1 |
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| Рабочее оборудование гидравли-чЕСКОгО эКСКАВАТОРА | 1979 |
|
SU831903A1 |
| Рабочее оборудование экскаватора | 1974 |
|
SU868010A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2002 |
|
RU2233948C1 |
| СМЕННОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ К ОДНОКОВШОВОМУ | 1968 |
|
SU210755A1 |
| Способ управления рабочим оборудованием экскаватора | 1978 |
|
SU885458A1 |
| Рабочее оборудование одноковшового экскаватора | 1977 |
|
SU705079A2 |
| Способ копания одноковшовым экскаватором и устройство для его осуществления | 1976 |
|
SU749988A1 |